地面点云分割方法、装置、存储介质及计算单元与流程
本技术涉及自动驾驶,特别涉及一种地面点云分割方法、装置、存储介质及计算单元。
背景技术:
1、目前的高级别自动驾驶落地方案通常离不开激光雷达,由于激光扫描的特性,每帧点云中有相当一部分属于地面。因此,激光感知的第一步就是要从点云中滤除属于地面的部分,即地面分割(ground segmentation)。
2、现有的地面分割算法通常依赖地平假设,即假设地面近似是一个平面,然后按照一定的规则将特定高度以下的点云作为地面点分割出去。但事实上道路经常不是平的,除了有隆起、坑洼等,也有如桥梁、隧道、坡道等在大尺度上不平坦的现象。在这些复杂情景下,基于低平假设的方法通常会得到错误的结果:要么将障碍物作为地面滤掉了,要么因为地面高于自车而将地面作为障碍物保留了。
技术实现思路
1、本技术提供了一种地面点云分割方法、装置、存储介质及计算单元,用于解决基于地平假设的地面分割算法不准确的问题。所述技术方案如下:
2、一方面,提供了一种地面点云分割方法,所述方法包括:
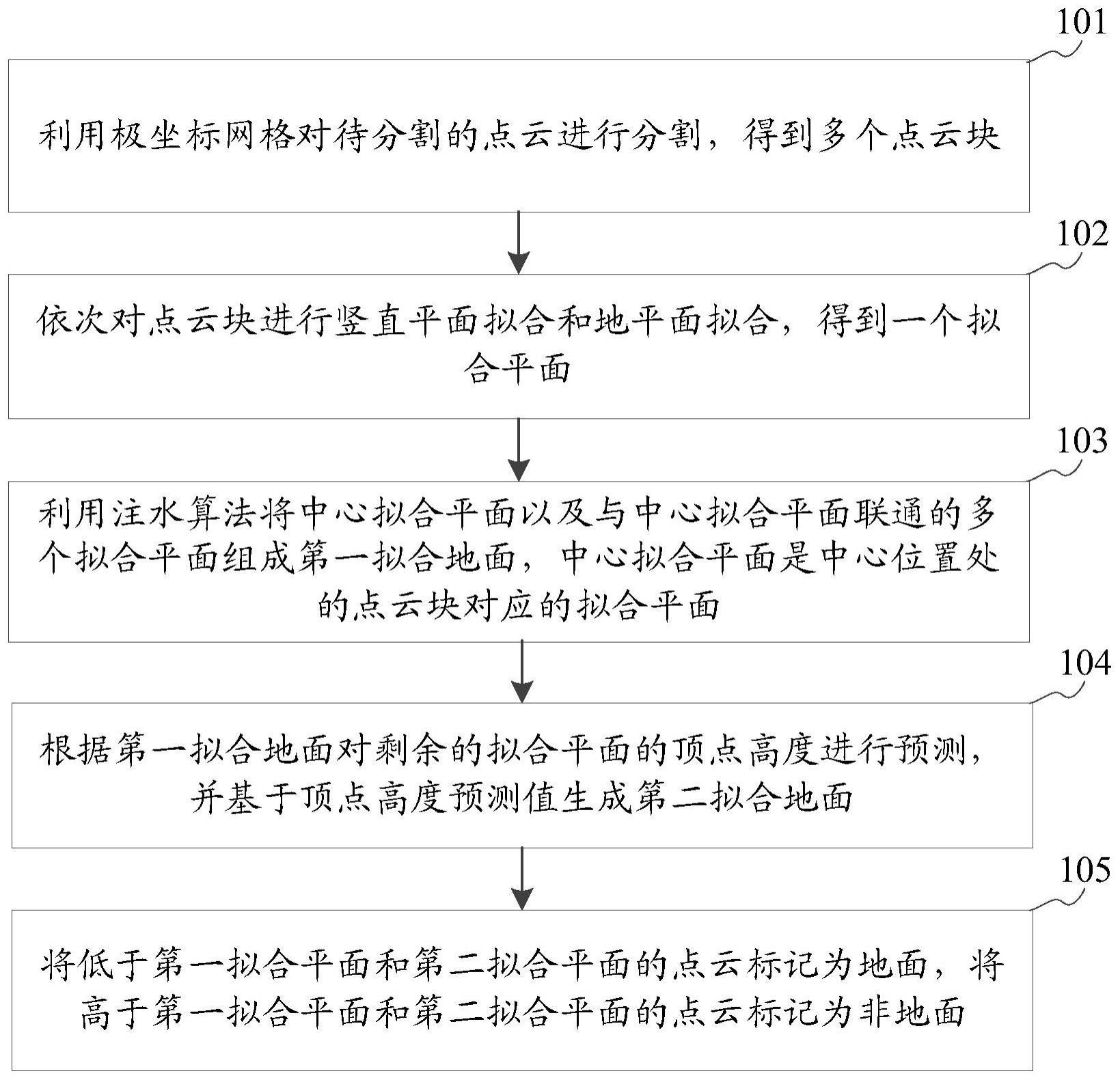
3、利用极坐标网格对待分割的点云进行分割,得到多个点云块;
4、依次对所述点云块进行竖直平面拟合和地平面拟合,得到一个拟合平面;
5、利用注水算法将中心拟合平面以及与所述中心拟合平面联通的多个拟合平面组成第一拟合地面,所述中心拟合平面是中心位置处的点云块对应的拟合平面;
6、根据所述第一拟合地面对剩余的拟合平面的顶点高度进行预测,并基于顶点高度预测值生成第二拟合地面;
7、将低于所述第一拟合平面和所述第二拟合平面的点云标记为地面,将高于所述第一拟合平面和所述第二拟合平面的点云标记为非地面。
8、在一种可能的实现方式中,所述基于所述第一拟合地面对剩余的拟合平面的拟合高度进行预测,包括:
9、对于剩余的每个拟合平面对应的点云块,若所述点云块在沿所述极坐标网格的圆周方向存在注水区块,则根据所述注水区块和位于所述点云块的内侧的点云块对所述点云块的顶点高度进行预测,所述注水区块是所述第一拟合地面中的拟合平面对应的点云块;
10、若所述点云块在沿所述极坐标网格的圆周方向不存在注水区块,则根据位于所述点云块的内侧和左右两侧的点云块对所述点云块的顶点高度进行预测。
11、在一种可能的实现方式中,所述利用注水算法将中心拟合平面以及与所述中心拟合平面联通的多个拟合平面组成第一拟合地面,包括:
12、将中心拟合平面对应的点云块作为候选区块添加到区块集合中;
13、遍历与区块集合中的每个候选区块相邻的点云块,获取所述点云块对应的拟合平面在两个公共端点的高度以及相邻的候选区块对应的拟合平面在所述两个公共端点的高度,所述两个公共端点是所述点云块和所述候选区块的公共边的两个端点;
14、若所述点云块对应的拟合平面与所述候选区块对应的拟合平面在每个公共端点的高度差的绝对值都小于误差容忍阈值,则将所述点云块作为候选区块添加到所述区块集合中;循环执行所述遍历与区块集合中的每个候选区块相邻的点云块的步骤,直至不存在能够加入所述区块集合的点云块时停止;
15、将所述区块集合中每个候选区块对应的拟合平面组成第一拟合地面。
16、在一种可能的实现方式中,所述依次对所述点云块进行竖直平面拟合和地平面拟合,得到一个拟合平面,包括:
17、对所述点云块拟合竖直平面,并剔除所述点云块中与所述竖直平面之间的距离小于第一阈值的点云;
18、对剔除点云后的所述点云块进行地平面拟合,得到一个拟合平面;
19、检测所述拟合平面是否符合预设的检验条件;
20、若所述拟合平面满足所述检验条件,则保留所述拟合平面。
21、在一种可能的实现方式中,所述对所述点云块拟合竖直平面,包括:
22、从所述点云块中选取预定比例的高度最低的点云作为种子点云;
23、对所述种子点云进行主成分分析;
24、将分析结果中特征值最小的特征向量确定为拟合平面的法向量,并生成拟合平面;
25、若所述拟合平面的倾角大于第二阈值,则确定所述拟合平面为竖直平面。
26、在一种可能的实现方式中,所述对剔除点云后的所述点云块进行地平面拟合,得到一个拟合平面,包括:
27、从剔除点云后的所述点云块中选取预定比例的高度最低的点云作为种子点云;
28、对所述种子点云进行主成分分析;
29、将分析结果中特征值最小的特征向量确定为拟合平面的法向量,并生成拟合平面;
30、将所述点云块中与所述拟合平面的距离小于第三阈值的点云作为种子点云,循环执行所述对所述种子点云进行主成分分析的步骤,直至循环次数达到次数阈值后停止。
31、在一种可能的实现方式中,所述检测所述拟合平面是否符合预设的检验条件,包括:
32、检测所述拟合平面的倾角是否小于第四阈值;和/或,
33、检测所述拟合平面在最后一次拟合时的最小特征值是否小于第五阈值;和/或,
34、检测所述拟合平面在最后一次拟合时的最大特征值和第二大特征值的比值是否小于第六阈值。
35、一方面,提供了一种地面点云分割装置,所述装置包括:
36、分割模块,用于利用极坐标网格对待分割的点云进行分割,得到多个点云块;
37、拟合模块,用于依次对所述点云块进行竖直平面拟合和地平面拟合,得到一个拟合平面;
38、注水模块,用于利用注水算法将中心拟合平面以及与所述中心拟合平面联通的多个拟合平面组成第一拟合地面,所述中心拟合平面是中心位置处的点云块对应的拟合平面;
39、生成模块,用于根据所述第一拟合地面对剩余的拟合平面的顶点高度进行预测,并基于顶点高度预测值生成第二拟合地面;
40、标记模块,用于将低于所述第一拟合平面和所述第二拟合平面的点云标记为地面,将高于所述第一拟合平面和所述第二拟合平面的点云标记为非地面。
41、一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如上所述的地面点云分割方法。
42、一方面,提供了一种计算单元,所述计算单元包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现如上所述的地面点云分割方法。
43、本技术提供的技术方案的有益效果至少包括:
44、在利用极坐标网格对待分割的点云进行分割后,可以对得到的点云块进行拟合得到拟合平面,由于中心位置处的点云块足够接近于自动驾驶车辆,所以,将该点云块对应的中心拟合平面确定为地面,然后利用注水算法将中心拟合平面以及与中心拟合平面联通的多个拟合平面组成第一拟合地面,再根据第一拟合地面对剩余的拟合平面的顶点高度进行预测,并基于顶点高度预测值生成第二拟合地面,最后将低于第一拟合平面和第二拟合平面的点云标记为地面,将高于第一拟合平面和第二拟合平面的点云标记为非地面,这样,可以对坡道、桥梁、隧道等非平坦地面进行正确分割,实现快速且鲁棒的地面分割,为提高激光感知性能提供了良好的保障。
- 还没有人留言评论。精彩留言会获得点赞!