一种六自由度平台结构优化方法及装置与流程
本技术涉及数据处理,尤其涉及一种六自由度平台结构优化方法及装置。
背景技术:
1、在六自由度平台的设计和制造过程中,一般企业都只是根据经验去设计六自由度平台的参数,例如平台的高度、铰点位置数据、作动器长度等,这样设计出来的六自由度平台系统可能无法满足技术指标要求,又或者满足技术指标要求的情况下无法使整个六自由度平台的设计使用达到最优。
技术实现思路
1、有鉴于此,本技术实施例提供了一种六自由度平台结构优化方法及装置,旨在满足设计指标的约束条件下,获得最优的六自由度平台设计参数。
2、第一方面,本技术实施例提供了一种六自由度平台结构优化方法,包括:
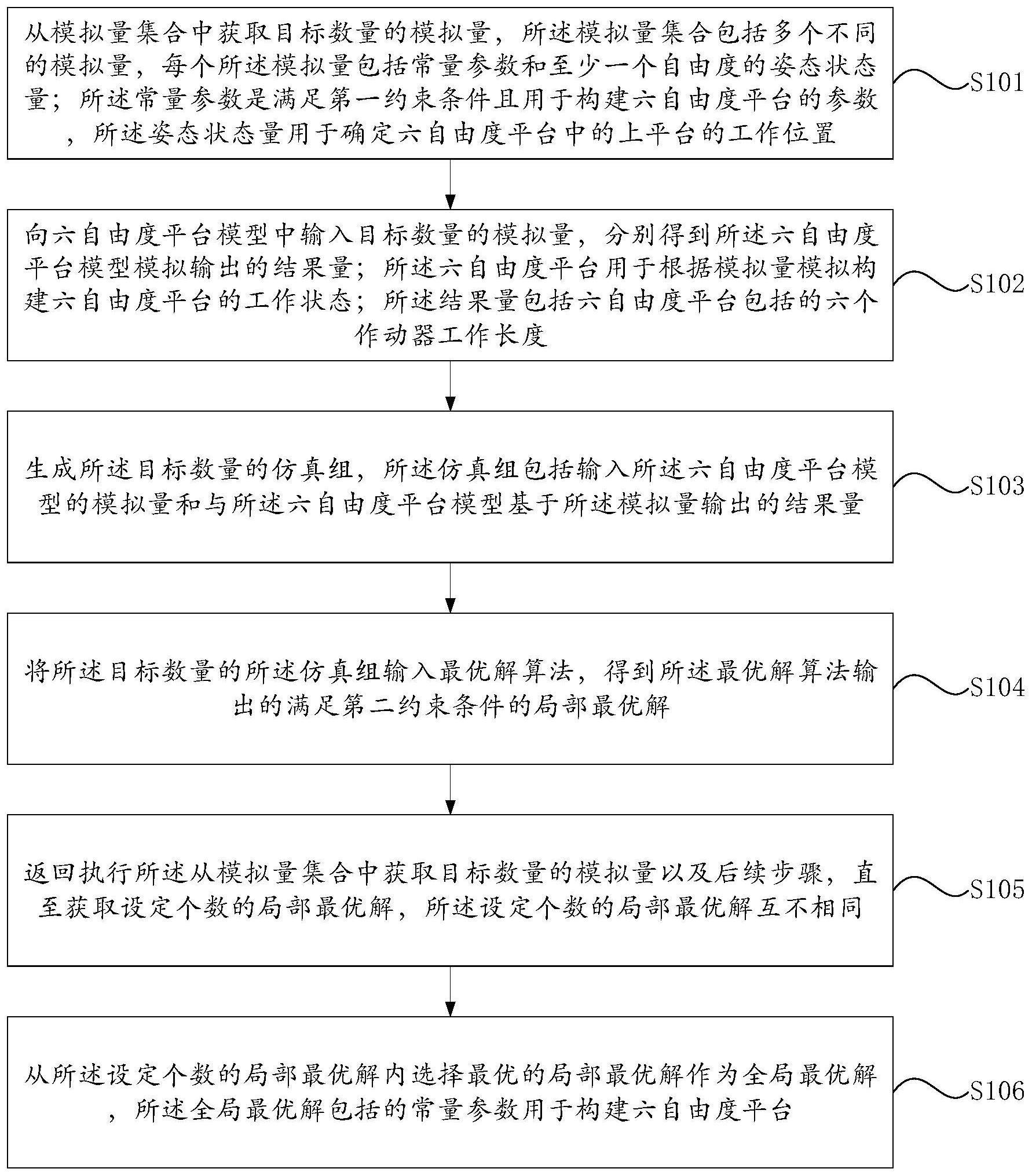
3、从模拟量集合中获取目标数量的模拟量,所述模拟量集合包括多个不同的模拟量,每个所述模拟量包括常量参数和至少一个自由度的姿态状态量;所述常量参数是满足第一约束条件且用于构建六自由度平台的参数,所述姿态状态量用于确定六自由度平台中的上平台的工作位置;
4、向六自由度平台模型中输入目标数量的模拟量,分别得到所述六自由度平台模型模拟输出的结果量;所述六自由度平台用于根据模拟量模拟构建六自由度平台的工作状态;所述结果量包括六自由度平台包括的六个作动器工作长度;
5、生成所述目标数量的仿真组,所述仿真组包括输入所述六自由度平台模型的模拟量和与所述六自由度平台模型基于所述模拟量输出的结果量;
6、将所述目标数量的所述仿真组输入最优解算法,得到所述最优解算法输出的满足第二约束条件的局部最优解;
7、返回执行所述从模拟量集合中获取目标数量的模拟量以及后续步骤,直至获取设定个数的局部最优解,所述设定个数的局部最优解互不相同;
8、从所述设定个数的局部最优解内选择最优的局部最优解作为全局最优解,所述全局最优解包括的常量参数用于构建六自由度平台。
9、可选的,所述从模拟量集合中获取目标数量的模拟量,包括:
10、按照时间顺序,根据设定趋势从模拟量集合中获取目标数量的模拟量。
11、可选的,在所述从模拟量集合中获取目标数量的模拟量之后,所述方法还包括:
12、从所述模拟量集合中删除所述目标数量的模拟量。
13、可选的,所述常量参数包括六自由度平台内上平台与下平台之间的距离、所述下平台内多个虎克铰分布形成的下圆的半径、所述上平台内多个虎克铰分布形成的上圆的半径、同一平台内近铰点所张的圆心角以及同一平台内远铰点所张的圆心角。
14、可选的,所述第一约束条件为所述上圆的半径小于所述下圆的半径和同一平台内近铰点所张的圆心角小于同一平台内远铰点所张的圆心角。
15、可选的,所述将所述目标数量的仿真组输入最优解算法,得到所述最优解算法输出的满足第二约束条件的局部最优解,包括:
16、若所述目标数量的仿真组不满足所述最优解算法的第二约束条件,则执行所述向预设的六自由度平台模型中输入所述模拟量集合中的模拟量,并执行后续操作,直至获得满足第二约束条件的目标数量的仿真组;
17、若所述目标数量的仿真组满足所述最优解算法的第二约束条件,则根据优化函数,获得所述目标数量的仿真组中的局部最优解,所述优化函数是结合工作空间最大化得到的第一参数及灵巧度得到的第二参数设置的。
18、可选的,所述根据优化函数,获得所述目标数量的仿真组中的局部最优解,包括:
19、计算所述目标数量的仿真组中的每组仿真组的优化数值,所述优化数值为目标差值除以二后的绝对值,所述目标差值为二与所述第一参数和所述第二参数的差值;
20、将所述目标数量的仿真组中优化数值最小的仿真值确定为局部最优解。
21、可选的,所述最优解算法为粒子群算法或遗传变异算法。
22、可选的,所述第二约束条件为每组所述仿真组内的结果量内的每个作动器的工作长度与所述作动器的初始长度的比值不超过预设比值、作动器长度方向与下平台法向量的夹角在正负四十五度之间、所述目标数量的仿真组内的每组仿真组构建的六自由度平台的工作空间不超过预设的工作范围以及根据所述目标数量的仿真组内的每组仿真组计算的灵巧度非无穷值。
23、可选的,所述六自由度平台模型包括:
24、输入单元,用于接收所述模拟量;
25、坐标转换单元,用于根据所述模拟量,将上平台在上平台动坐标系下的坐标转换为上平台在上平台静坐标系中的坐标;所述上平台动坐标系的原点为六自由度平台内的上平台的质心,所述上平台动坐标系与上平台保持固定关系,所述上平台静坐标系为所述动坐标处于初始位置时的坐标系;所述坐标转换单元包括旋转矩阵单元和平移矩阵单元,所述旋转矩阵单元内设置有上平台动坐标系转换至上平台静坐标系的变换矩阵;所述平移矩阵单元用于计算动坐标系原点相对于静坐标系的位移;
26、上平台单元,用于将上平台内的六个虎克铰在上平台静坐标系中的坐标平移设定距离获得上平台内的六个虎克铰在下平台静坐标系内的坐标点;
27、下平台单元,用于获取下平台内的六个虎克铰在下平台静坐标系内的坐标点;
28、作动器长度计算模块,用于根据上平台内的六个虎克铰在下平台静坐标系内的坐标点和下平台内的六个虎克铰在下平台静坐标系内的坐标点,通过点与点距离公式,计算六个作动器的工作长度;六个所述作动器内的每个作动器通过一个虎克铰与上平台铰接,六个所述作动器内的每个作动器还通过一个虎克铰与下平台铰接。
29、第二方面,本技术还提出一种六自由度平台结构优化装置,包括:
30、第一获取模块,用于从模拟量集合中获取目标数量的模拟量,所述模拟量集合包括多个不同的模拟量,每个所述模拟量包括常量参数和至少一个自由度的姿态状态量;所述常量参数是满足第一约束条件且用于构建六自由度平台的参数,所述姿态状态量用于确定六自由度平台中的上平台的工作位置;
31、模拟模块,用于向六自由度平台模型中输入目标数量的模拟量,分别得到所述六自由度平台模型模拟输出的结果量;所述六自由度平台用于根据模拟量模拟构建六自由度平台的工作状态;所述结果量包括六自由度平台包括的六个作动器工作长度;
32、生成模块,用于生成所述目标数量的仿真组,所述仿真组包括输入所述六自由度平台模型的模拟量和与所述六自由度平台模型基于所述模拟量输出的结果量;
33、计算模块,用于将所述目标数量的所述仿真组输入最优解算法,得到所述最优解算法输出的满足第二约束条件的局部最优解;
34、第二获取模块,用于返回执行所述从模拟量集合中获取目标数量的模拟量以及后续步骤,直至获取设定个数的局部最优解,所述设定个数的局部最优解互不相同;
35、确认模块,用于从所述设定个数的局部最优解内选择最优的局部最优解作为全局最优解,所述全局最优解包括的常量参数用于构建六自由度平台
36、本技术实施例提供了一种六自由度平台结构优化方法及装置。本技术通过从模拟量集合中获取目标数量的模拟量,所述模拟量集合包括多个不同的模拟量,每个模拟量包括常量参数和至少一个自由度的姿态状态量;向预设的六自由度平台模型中输入所述模拟量集合中目标数量的模拟量,分别通过六自由度平台用于根据模拟量模拟构建六自由度平台的工作状态,得到六自由度平台模型模拟输出的结果量;生成所述目标数量的仿真组,所述仿真组包括输入所述六自由度平台模型的模拟量和与所述六自由度平台模型基于所述模拟量输出的结果量;将所述目标数量的所述仿真组输入最优解算法,得到所述最优解算法输出的满足第二约束条件的局部最优解;返回执行所述从模拟量集合中获取目标数量的模拟量以及后续步骤,直至获取设定个数的局部最优解,所述设定个数的局部最优解互不相同;从所述设定个数的局部最优解内选择最优的局部最优解作为全局最优解,所述全局最优解包括的常量参数用于构建六自由度平台。多次从模拟量集合中获取目标数量的模拟量,模拟量集合中的每个模拟量可以模拟构建一个六自由度平台的工作状态,通过最优解算法获取目标数量的仿真组中的满足第二约束条件的局部最优解,并多次获取模拟量集合生成多个局部最优解,从多个局部最优解获取全局最优解,最终将全局最优解包括的常量参数用于构建六自由度平台。如此能够,通过包括大量模拟量的模拟量集合中筛选获得满足约束条件的全局最优解,获取模拟量集合中最优的六自由度平台设计参数。
- 还没有人留言评论。精彩留言会获得点赞!