拍摄设备的镜头畸变参数确定方法、装置和计算机设备与流程
本技术涉及拍摄设备的镜头畸变参数确定,特别是涉及一种拍摄设备的镜头畸变参数确定方法、装置和计算机设备。
背景技术:
1、在拍摄设备的镜头容易被外界环境污染或者破坏的场景下,一般需要给拍摄设备或者拍摄设备的镜头部分佩戴透明的保护壳体,保护拍摄设备的镜头不被污染或者破坏。例如,在游乐场玩耍或者水下拍摄时,大多数的拍摄设备需要佩戴透明的保护壳体才能进行拍摄,由于保护壳体会改变光线的传播路径,导致拍摄的图像存在畸变,后期对拍摄图像进行处理(拼接或者畸变校正)之前,一般需要根据拍摄设备在拍摄图像时佩戴的保护壳体类型来选择对应的畸变校正参数。现有软件确定畸变校正参数一般是人工来选择拍摄设备佩戴保护壳体的类型,或者人工输入畸变参数。
2、由此可知,目前人工确定拍摄图像的畸变校正参数的方案非常不智能及繁琐,提高了拍摄设备的镜头畸变参数确定软件的使用门槛,用户体验较差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够自动识别出拍摄设备佩戴保护壳体的类型以自动确定该视频的畸变校正参数的拍摄设备的镜头畸变参数确定方法、装置和计算机设备。
2、第一方面,本技术提供了一种拍摄设备的镜头畸变参数确定方法,所述方法包括:
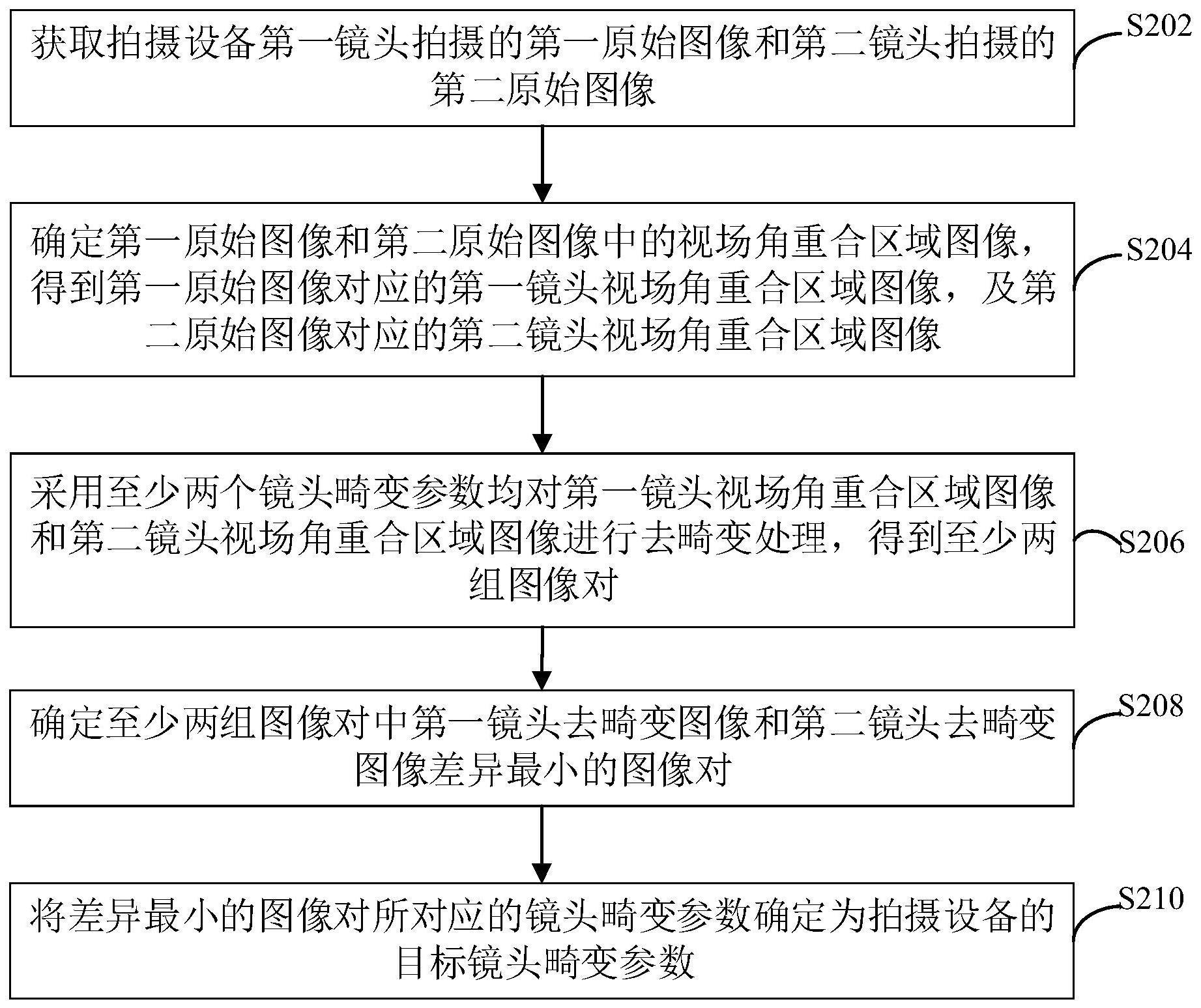
3、获取拍摄设备第一镜头拍摄的第一原始图像和第二镜头拍摄的第二原始图像;
4、确定第一原始图像和第二原始图像中的视场角重合区域图像,得到第一原始图像对应的第一镜头视场角重合区域图像,及第二原始图像对应的第二镜头视场角重合区域图像;
5、采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
6、确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
7、将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
8、在其中一个实施例中,至少两个镜头畸变参数包括未佩戴保护壳体的镜头畸变参数以及佩戴有保护壳体的至少一个镜头畸变参数;
9、将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数还包括:
10、若差异最小的图像对根据佩戴有保护壳体的镜头畸变参数得到,则确定拍摄设备为佩戴保护壳体状态;
11、将差异最小的图像对所对应的佩戴有保护壳体的镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
12、在其中一个实施例中,至少两个镜头畸变参数包括至少两个不同保护壳体类型对应的镜头畸变参数;
13、所述方法还包括:根据佩戴有保护壳体的镜头畸变参数所对应的壳体类型,确定拍摄设备佩戴的壳体类型。
14、在其中一个实施例中,采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对,包括:
15、分别对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行重投影,得到重投影后的第一镜头视场角重合区域图像和第二镜头视场角重合区域图像;
16、采用至少两个镜头畸变参数均对重投影后的第一镜头视场角重合区域图像和重投影后的第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对。
17、在其中一个实施例中,确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对,包括:
18、分别计算至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像的图像质量评价指标;
19、将图像质量评价指标表征第一镜头去畸变图像和第二镜头去畸变图像相似度最高的图像对作为差异最小的图像对。
20、在其中一个实施例中,确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对,包括:
21、分别计算至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像之间的视差得分;
22、获取视差得分所表征第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对。
23、在其中一个实施例中,分别计算至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像之间的视差得分,包括:
24、根据预先制定的得分函数,确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像之间的视差得分;得分函数为以图像对中的图像块或像素点的视差为变量,并且表征图像对中两个图像差异大小的函数表达式。
25、在其中一个实施例中,确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对,包括:
26、分别计算至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像的图像质量评价指标;
27、将图像质量评价指标表征第一镜头去畸变图像和第二镜头去畸变图像相似度最高的图像对作为第一识别结果;
28、分别计算至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像之间的视差得分;
29、将视差得分所表征第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对作为第二识别结果;
30、根据第一识别结果和第二识别结果,确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对。
31、第二方面,本技术还提供了一种拍摄设备的镜头畸变参数确定方法,所述方法包括:
32、获取拍摄设备第一镜头拍摄的多帧第一原始图像和第二镜头拍摄的多帧第二原始图像;
33、确定多帧同时刻的第一原始图像和第二原始图像中视场角重合区域图像,得到多帧同时刻的第一原始图像中对应的视场角重合区域图像得到第一镜头视场角重合区域图像,及多帧同时刻的第二原始图像对应的第二镜头视场角重合区域图像;
34、采用至少两个镜头畸变参数均对多帧同时刻的第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
35、确定同时刻的至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
36、将同时刻的差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的备选镜头畸变参数;
37、对多个备选镜头畸变参数进行分类,将分类结果最多的备选镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
38、在其中一个实施例中,至少两个镜头畸变参数包括未佩戴保护壳体的镜头畸变参数以及佩戴有保护壳体的至少一个镜头畸变参数;
39、将同时刻的差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的备选镜头畸变参数还包括:
40、若差异最小的图像对根据佩戴有保护壳体的镜头畸变参数得到,则确定拍摄设备为佩戴保护壳体状态;
41、将差异最小的图像对所对应的佩戴有保护壳体的镜头畸变参数确定为拍摄设备的备选镜头畸变参数。
42、在其中一个实施例中,至少两个镜头畸变参数包括至少两个不同保护壳体类型对应的镜头畸变参数;
43、所述方法还包括:根据佩戴有保护壳体的镜头畸变参数所对应的壳体类型,确定拍摄设备佩戴的壳体类型。
44、在其中一个实施例中,采用至少两个镜头畸变参数均对多帧同时刻的第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对,包括:
45、分别对多帧同时刻的第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行重投影,得到重投影后的第一镜头视场角重合区域图像和第二镜头视场角重合区域图像;
46、采用至少两个镜头畸变参数均对重投影后的第一镜头视场角重合区域图像和重投影后的第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对。
47、第三方面,本技术还提供了一种拍摄设备的镜头畸变参数确定装置,所述装置包括:
48、获取模块,用于获取拍摄设备第一镜头拍摄的第一原始图像和第二镜头拍摄的第二原始图像;
49、图像提取模块,用于确定第一原始图像和第二原始图像中的视场角重合区域图像,得到第一原始图像对应的第一镜头视场角重合区域图像,及第二原始图像对应的第二镜头视场角重合区域图像;
50、去畸变模块,用于采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
51、识别模块,用于确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
52、确定模块,用于将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
53、在其中一个实施例中,获取模块,还用于获取拍摄设备第一镜头拍摄的多帧第一原始图像和第二镜头拍摄的多帧第二原始图像;
54、图像提取模块,还用于确定多帧同时刻的第一原始图像和第二原始图像中视场角重合区域图像,得到多帧同时刻的第一原始图像中对应的视场角重合区域图像得到第一镜头视场角重合区域图像,及多帧同时刻的第二原始图像对应的第二镜头视场角重合区域图像;
55、去畸变模块,还用于采用至少两个镜头畸变参数均对多帧同时刻的第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
56、识别模块,还用于确定同时刻的至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
57、确定模块,还用于将同时刻的差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的备选镜头畸变参数;对备选镜头畸变参数进行分类,将分类结果最多的备选镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
58、第四方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
59、获取拍摄设备第一镜头拍摄的第一原始图像和第二镜头拍摄的第二原始图像;
60、确定第一原始图像和第二原始图像中的视场角重合区域图像,得到第一原始图像对应的第一镜头视场角重合区域图像,及第二原始图像对应的第二镜头视场角重合区域图像;
61、采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
62、确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
63、将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
64、第五方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
65、获取拍摄设备第一镜头拍摄的第一原始图像和第二镜头拍摄的第二原始图像;
66、确定第一原始图像和第二原始图像中的视场角重合区域图像,得到第一原始图像对应的第一镜头视场角重合区域图像,及第二原始图像对应的第二镜头视场角重合区域图像;
67、采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
68、确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
69、将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
70、第六方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
71、获取拍摄设备第一镜头拍摄的第一原始图像和第二镜头拍摄的第二原始图像;
72、确定第一原始图像和第二原始图像中的视场角重合区域图像,得到第一原始图像对应的第一镜头视场角重合区域图像,及第二原始图像对应的第二镜头视场角重合区域图像;
73、采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;
74、确定至少两组图像对中第一镜头去畸变图像和第二镜头去畸变图像差异最小的图像对;
75、将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数。
76、上述拍摄设备的镜头畸变参数确定方法、装置和计算机设备,确定第一原始图像和第二原始图像中的视场角重合区域图像,得到第一原始图像对应的第一镜头视场角重合区域图像,及第二原始图像对应的第二镜头视场角重合区域图像;采用至少两个镜头畸变参数均对第一镜头视场角重合区域图像和第二镜头视场角重合区域图像进行去畸变处理,得到至少两组图像对;将差异最小的图像对所对应的镜头畸变参数确定为拍摄设备的目标镜头畸变参数;根据目标镜头畸变参数可以经过一次识别即可快速、准确地确定拍摄设备无论是佩戴有保护壳体还是未佩戴保护壳体时最佳的目标镜头畸变参数,根据目标镜头畸变参数还可以判断拍摄设备是否佩戴有保护壳体以及保护壳体的类型,无需人工手动选择拍摄设备是否佩戴有保护壳体以及无需手动选择拍摄设备的目标镜头畸变参数。
- 还没有人留言评论。精彩留言会获得点赞!