一种一体化装置的控制方法与流程
本技术涉及一体化转向平台的,特别涉及一种一体化装置的控制方法。
背景技术:
1、现有技术中,对于移动中的人员智能设备根据人员移动而进行转动,目前的识别主要是单一区域识别,例如:将感应器件的感应区域划分为多个区域,每一感应器件检测一个区域,其中,每一感应器件的感应区域均不重合。当存在某一感应器件的感应区域重合的情况时,其检测结果就会发生变化,导致无法对交叉区域进行识别,且人体的移动存在无规律性,因此,很难对于间断性人体移动信号进行统计,从而导致跟随人体转动的设备由于多个感应组件感应区域交叉会出现感应区域异常导致无法跟随的情况。
2、申请内容
3、本技术的主要目的是提出一种一体化装置的控制方法,旨在解决现有跟随人体转动的设备由于感应区域交叉会出现感应区域异常导致无法跟随的技术问题。
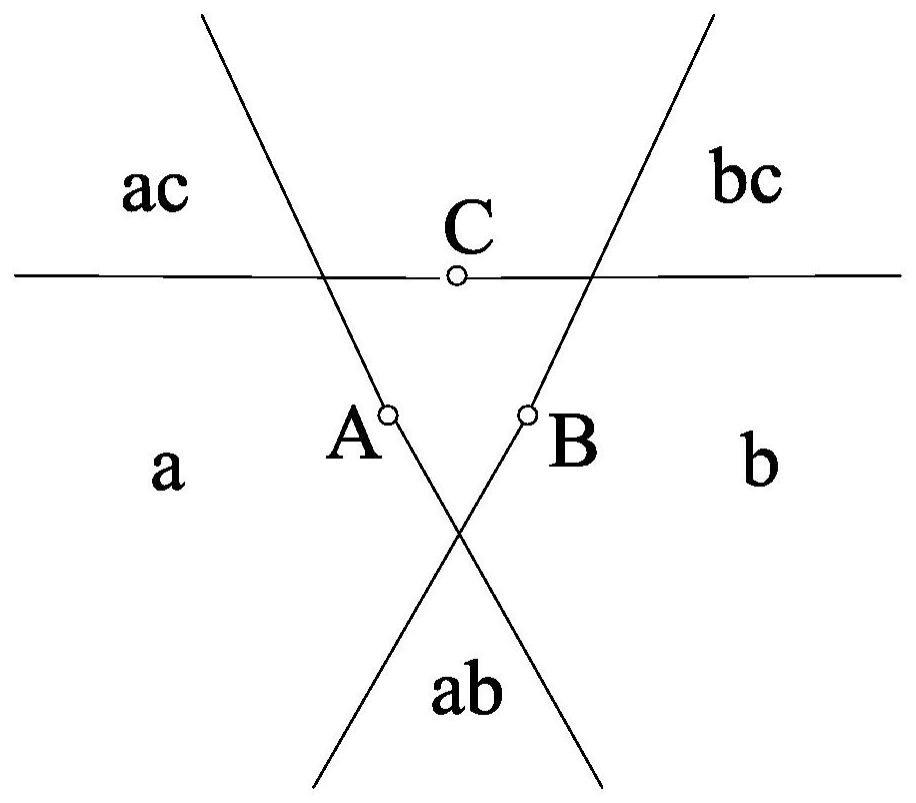
4、为实现上述目的,本技术提出一种一体化装置的控制方法,所述一体化装置包括转向组件以及至少三个红外检测器件,至少三个所述红外检测器件分布于同一检测面,且每一检测器件设置于所述检测面的不同位置,以将n个所述红外检测器件的检测区域分为依次相邻的第一检测区域、第一交叉检测区域、第二检测区域、第二交叉检测区域、第三检测区域以及第三交叉检测区域;其中,所述第一检测区域、所述第二检测区域以及所述第三检测区域为单独被一个红外检测器件检测,所述第一交叉检测区域、所述第二交叉检测区域以及所述第三交叉检测区域可被两个红外检测器件检测;
5、所述一体化装置的控制方法包括:
6、执行第一检测时序以获取预设时间长度内多个所述红外检测器件的多个反馈信号;
7、根据多个所述反馈信号判断是否存在活体;
8、若检测到活体,根据多个所述反馈信号确定所述转向组件的目标转动位置以及活体运动轨迹。
9、可选地,当所述红外检测器件的数量为5时,所述红外检测器件的检测区域还包括依次相邻设置的第四检测区域、第四交叉检测区域、第五检测区域以及第五交叉检测区域,所述第四检测区域靠近所述第三交叉检测区域设置,所述第五交叉检测区域靠近所述第一检测区域设置。
10、可选地,每一检测区域还包括近场检测分区、中场检测分区以及远场检测分区。
11、可选地,所述根据多个所述反馈信号判断是否存在活体的步骤包括:
12、当任一所述反馈信号的强度大于第一预设信号强度时,确认存在活体。
13、可选地,所述若检测到活体,根据多个所述反馈信号确定所述转向组件的目标转动位置以及活体运动轨迹包括:
14、当检测到活体时,筛选出检测到活体所述反馈信号;
15、依据所述红外检测器件的检测区域对筛选出的所述反馈信号进行分组;
16、根据所述分组、每一所述反馈信号的检测时间以及每一组的所述反馈信号强度确定所述转向组件的目标转动位置;
17、依据所述反馈信号以及所述检测时间重演活体活动以确定所述运动轨迹。
18、可选地,所述根据所述分组、每一所述反馈信号的检测时间以及每一组的所述反馈信号强度确定所述转向组件的目标转动位置的步骤之后还包括:
19、当确认所述目标转动位置为某一检测区域的某一分区时,降低间隔区域的检测灵敏度,提高所述检测位置所在的区域的灵敏度,并提高相邻的检测区域的灵敏度。
20、可选地,所述根据所述分组、每一所述反馈信号的检测时间以及每一组的所述反馈信号强度确定所述转向组件的目标转动位置的步骤包括:
21、当在第一目标检测时间内,筛选出的所述反馈信号仅在某一所述红外检测器件的检测区域被检测到,则确认所述转向组件的目标转动位置为当前红外检测器件所对应的检测区域;或,
22、当在第一目标检测时间内,筛选出的所述反馈信号在两个相邻所述红外检测器件的检测区域被检测到,且每一检测时间点均存在两个所述反馈信号,则确认所述转向组件的目标转动位置为两个相邻的红外检测器件所对应的交叉检测区域;或,
23、当在第一目标检测时间内,筛选出的所述反馈信号至少在两个不同红外检测器件的检测区域被检测到,且每一检测时间点仅存在一个所述反馈信号时,确认所述转向组件的目标转动位置为最后时刻的所述反馈信号所对应的红外检测器件的检测区域;
24、当在第一目标检测时间内,筛选出的所述反馈信号至少在两个不同红外检测器件的检测区域被检测到,且每一检测时间点存在两个所述反馈信号时,则确认所述转向组件的目标转动位置为最后时刻的两个所述反馈信号所对应的红外检测器件的检测区域的中间区域。
25、可选地,所述依据所述反馈信号以及所述检测时间重演活体活动以确定所述运动轨迹的步骤包括:
26、根据所述反馈信号确定多个检测位置;
27、根据同一时刻的所述反馈信号的个数确定活体数量;
28、依据所述活体数量以及所述检测位置确定起始检测位置以及末端检测位置;
29、依据多个所述检测位置、所述起始检测位置以及所述末端检测位置确定活体在不同检测区域的运动轨迹。
30、可选地,若确认的目标转动位置为任一交叉区域时,为两个检测所述交叉区域的红外检测器件分别增加不同的的检测时间点以形成第二检测时序以及第三检测时序,以使两个所述红外检测器件存在相同的检测时间,也存在错开的检测时间;
31、并对每一所述红外检测器件执行以下步骤;
32、在第二目标检测时间内,依据所述第二检测时序以及所述第三检测时序获取多个实时检测信号;
33、将第二目标检测时间分为前期检测时间、中期检测时间以及后期检测时间;
34、将所述实时检测信号中的反馈信号按照上述检测时间分类划分,并根据每一时间段的反馈信号的数量、反馈信号对应的红外检测器件以及每一反馈信号的检测时刻确定对应活体的运动轨迹。
35、可选地,所述一体化装置包括手动模式、智能模式、自动跟随模式以及装机测试模式,
36、所述一体化装置的控制方法还包括:
37、获取模式切换指令;
38、当所述模式切换指令指示切换至自动跟随模式时,执行步骤s1-步骤s3。
39、为实现上述目的,本技术还提出一种一体化装置,所述一体化装置执行如上所述的一体化装置的控制方法。
40、本技术的技术方案,通过将一体化装置的红外检测器件进行特殊的位置设置,以保证每个红外检测器件的检测区域均存在一定交叉的位置,通过检测预设时间长度内多个所述红外检测器件的多个反馈信号,基于每一红外检测器件,可以获得多个带有时序特征的反馈信号,因此,依据每一红外检测器件的时序特征以及强度特征可以判断是否检测到活体以及活体的预测位置,从而可以依据上述结果判断目标转动位置以及确定活体运动轨迹,通过进行时序检测以及匹配以规律的重合检测区域能让一体化装置检测到活体处于交叉区域的情况,从而能解决跟随人体转动的设备由于感应区域交叉会出现感应区域异常导致无法跟随的问题。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!