一种基于DAS的地铁隧道外部危害作业入侵识别方法与流程
本发明涉及地铁隧道监控,具体涉及一种基于das的地铁隧道外部危害作业入侵识别方法。
背景技术:
1、随着城市轨道交通的飞速发展,列车运行速度越来越快,为保证行车运营安全,应加强对应急事件的检测与处理,应实时监测运营环境,实现外部危害作业入侵的报警与列车控制。轨道交通隧道外部危害作业入侵是指在列车运行轨道上所有造成行车安全隐患的施工作业,这些作业可能导致隧道渗水甚至形变,严重危害地铁运行安全。由于外部危害事件具有突发性和不可预测性,这就要求外部危害入侵识别算法应具有响应快、准确度高的特点。
2、当前常用的地铁隧道外部危害作业入侵识别通常使用震动传感器及车辆视觉系统对隧道入侵情况进行识别,震动传感器部署在隧道中实时反馈震动信号进行外部危害作业的判断,这种方式由于仅识别单一信号,存在识别错误率较高,需要部署设备数量大,维护难度高的问题。车辆视觉系统通过部署在列车上的视觉传感器来识别前方道路是否存在入侵作业,检测算法分为如下几类,即光流法、帧差法、背景消减法、时间差分法等,它们有各自的优缺点:光流法可携带运动物体的运动信息和景物的三维结构信息,检测效率高,易于实现,但方法复杂,计算量大,不能满足实时的要求;帧差法检测速度较快,对缓慢变换的光照不敏感,方法简单,易于实现,但容易出现“双影”和“空洞”现象,阈值也需人工设定;背景消减法可检测运动目标,检测准确,易于实现,但对光照的变化和阴影的干扰等特别敏感;时间差分法运算速度快,但是检测出的目标可能出现空洞。上述识别方式不能提前对运行车辆以及管控人员进行预警,也不能准确识别出隧道外部作业是否对隧道存在危害。
3、分布式光纤声学传感(distributed acoustic sensing,das)技术利用相干背向瑞利散射光的相位而非光强来探测音频范围内的声音或振动等信号,不仅可以利用相位幅值大小来提供声音或振动事件强度信息,还利用线性定量测量值来实现对声音或振动事件相位和频率信息的获取。该技术具有长距离(数十公里)连续(空间分辨率数米)的振动或声信息获取,全尺度(幅度、频率、相位)数万道信息的实时测量,耐高温高压等恶劣环境、且抗电磁干扰等优势。通过该技术可以提高识别准确率以及识别距离,使地铁运行更加安全。
4、本发明提出一种基于das的地铁隧道外部危害作业入侵识别方法,基于das信号通过机器学习算法对外部危害作业入侵进行识别,可以识别出在隧道外部还未入侵到隧道内部的作业,进而识别处危害作业并进行提前预警,同时也可以对隧道内部发生的异常信号进行识别并预警,极大地提高了识别准确率以及预警能力。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于das的地铁隧道外部危害作业入侵识别方法,解决了以下技术问题:
2、1、现有采用震动传感器识别地铁隧道外部危害作业入侵方法,仅能识别单一信号,存在识别错误率较高、需要部署设备数量大、维护难度高等问题;
3、2、现有采用车辆视觉系统识别地铁隧道外部危害作业入侵方法,不能提前对运行车辆以及管控人员进行预警,也不能准确识别出隧道外部作业是否对隧道结构产生危害。
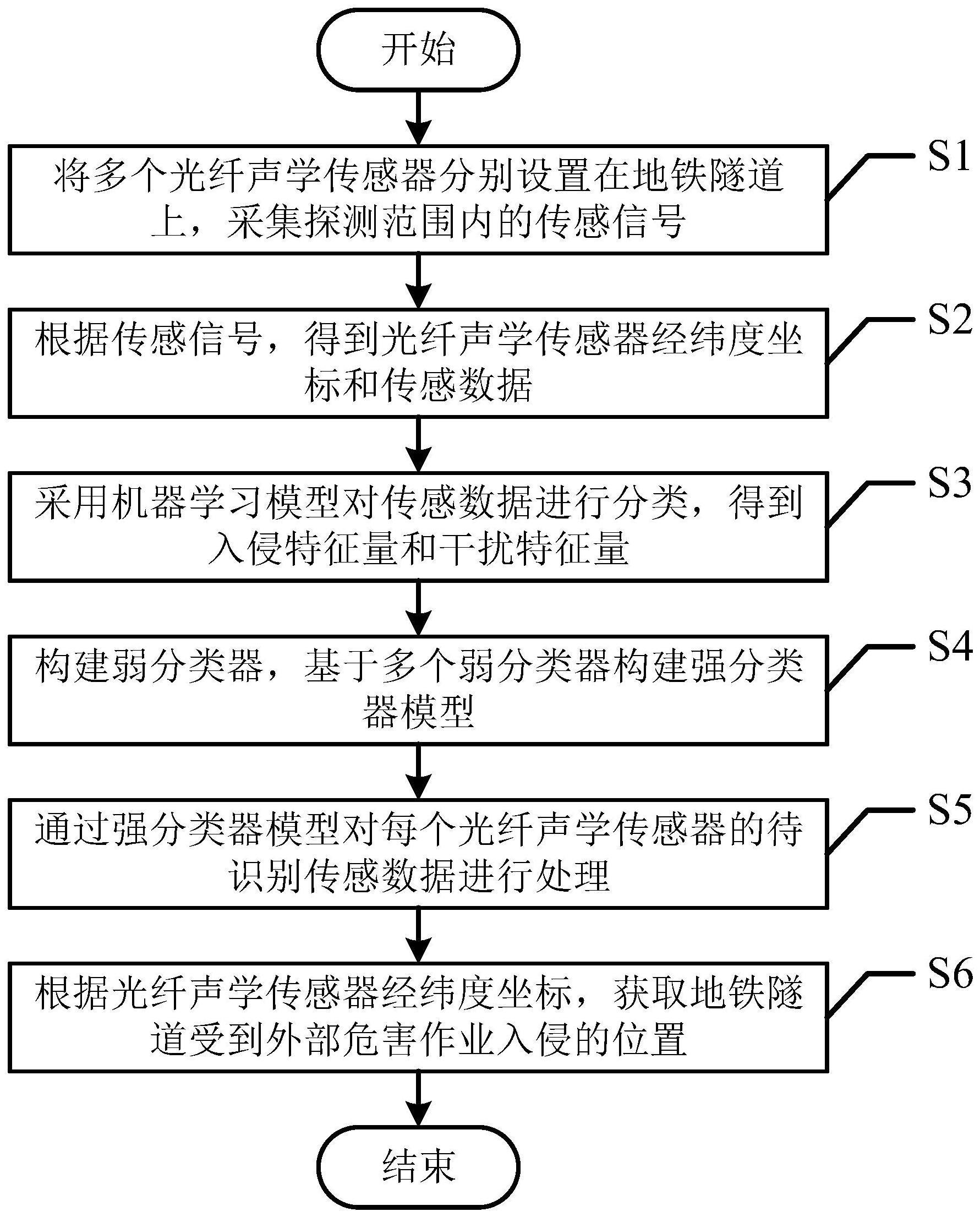
4、为了达到上述发明目的,本发明采用的技术方案为:一种基于das的地铁隧道外部危害作业入侵识别方法,包括以下步骤:
5、s1、将多个光纤声学传感器分别设置在地铁隧道上,采集探测范围内的传感信号;
6、s2、根据传感信号,得到光纤声学传感器经纬度坐标和传感数据;
7、s3、采用机器学习模型对传感数据进行分类,得到入侵特征量和干扰特征量;
8、s4、根据入侵特征量和干扰特征量,构建弱分类器,基于多个弱分类器,构建强分类器模型;
9、s5、通过强分类器模型对每个光纤声学传感器的待识别传感数据进行处理,在强分类器模型的输出值大于0时,地铁隧道受到外部危害作业入侵;
10、s6、根据光纤声学传感器经纬度坐标,获取地铁隧道受到外部危害作业入侵的位置。
11、进一步地,所述步骤s1中传感信号的表达式为:
12、oi=(loai,sigi)
13、loai=(loi,lai)
14、其中,oi为第i个光纤声学传感器的传感信号,loai为第i个光纤声学传感器的经纬度坐标,loi为第i个光纤声学传感器的经度坐标,lai为第i个光纤声学传感器的纬度坐标,sigi为第i个光纤声学传感器的传感数据。
15、进一步地,所述步骤s3中机器学习模型具体如下:
16、先通过一维卷积获取时间序列输入的节点特征ei=conv(sigi),将节点特征集e={e1,…,ei,ej,…,el}输入至图注意力层中,具体公式如下:
17、vij=w·β·leakrelu[(ei⊕ej)]
18、αij=exp(vij)/∑jexp(vij)
19、pi=tanh(∑jαij·ej)
20、其中,conv(·)为卷积运算,l为节点特征数量,i和j用于表征节点特征的编号,j为i的相邻k阶邻居编号;sigi为第i个光纤声学传感器的传感数据;vij表明节点特征ej对节点特征ei的重要性,w为重要性权重矩阵,β为节点特征权重矩阵,leakrelu[·]为高级激活函数,ei为第i个节点特征,ej为第j个节点特征,⊕表示拼接操作;“·”为点乘;αij为节点特征ej对节点特征ei的贡献的注意力得分,∑jexp(vij)为将所有i的相邻编号j对应的重要性vij相加;pi为更新后的节点信息,与输入ei的行列数相同,tanh(·)为激活函数;
21、将更新后的节点信息pi输入至lstm层得到向量p’i=lstm(pi),最后通过softmax层即可得到时序数据分类,s=softmax(p’i),当s小于等于0.5时为干扰特征,大于0.5时为入侵特征。
22、上述进一步方案的有益效果为:通过机器学习模型进行分类,提高了分类的效率以及准确性,分类出入侵特征量和干扰特征量有利于后续识别外部危害作业。
23、进一步地,所述步骤s4中强分类器模型的表达式为:
24、c*=λ1·c1+λ2·c2+…+λm·cm+…+λm·cm
25、其中,c*为强分类器模型的输出,c1为第1个弱分类器,c2为第2个弱分类器,cm为第m个弱分类器,cm为第m个弱分类器;λ1为第1个弱分类器c1的权重,λ2为第2个弱分类器c2的权重,λm为第m个弱分类器cm的权重,λm为第m个弱分类器cm的权重,m为弱分类器数量,“·”为点乘。
26、进一步地,所述训练强分类器模型时,每个弱分类器的权重λm的更新公式为:
27、
28、am,k-1=0.5*log[(1-em,k-1)/em,k-1]
29、em,k-1=λm,k-1·im,k-1
30、其中,λm,k为在第k次训练时第m个弱分类器cm的权重,λm,k-1为在第k-1次训练时第m个弱分类器cm的权重,am,k-1为在第k-1次训练时第m个弱分类器cm的正确分类率,em,k-1为在第k-1次训练时第m个弱分类器cm的错误分类率,im,k-1为在第k-1次训练时第m个弱分类器cm的误分次数,“·”为点乘。
31、上述进一步方案的有益效果为:通过多个弱分类器组成强分类器可以提高入侵作业分类的准确率,降低错分误判的可能性。
32、进一步地,所述每个弱分类器的表达式为:
33、c=softmax(f2)
34、f2=[s2,t2],s2=conv(f1),t2=cgru(f1+conv(f1))
35、f1=[x,s1,t1],s1=conv(x),t1=cgru(x+conv(x))
36、其中,c为弱分类器,softmax(·)为激活函数,f1为第一拼接特征,s1为第一空间特征,t1为第一时间特征,f2为第二拼接特征,s2为第二空间特征,t2为第二时间特征,conv(·)为空间卷积运算,[s2,t2]为将s2和t2进行拼接,x为入侵特征量和干扰特征量构成的输入量,[x,s1,t1]为将x、s1和t1进行拼接,cgru(·)为时间卷积运算。
37、上述进一步方案的有益效果为:对弱分类器分配不同权重,使弱分类器进行级联,对每个弱分类器的权重λm迭代更新,使正确率越高的弱分类器占据更高权重,提高了最终分类器的准确率。
38、进一步地,所述时间卷积cgru运算表达式为:
39、zt=sigmoid(wz*χt+uz*ht-1+bz)
40、rt=sigmoid(wr*χt+ur*ht-1+br)
41、ht=tanh(wh*χt+uh(rt⊙ht-1)+bh)
42、ot=(1-zt)⊙ht-1+zt⊙ht
43、其中,zt为t时刻更新门的输出,sigmoid(·)为激活函数,输入量χt为f1+conv(f1)或者x+conv(x),wz为更新门输入量χt的权重,uz为更新门状态量ht-1的权重,bz为更新门的偏置,“*”为卷积运算;rt为t时刻重置门的输出,wr为重置门输入量χt的权重,ur为重置门状态量ht-1的权重,br为重置门的偏置;ht为t时刻状态门输出的状态量,tanh(·)为激活函数,ht-1为t-1时刻状态门输出的状态量,wh为状态门输入量χt的权重,uh为rt⊙ht-1的权重,⊙为哈达玛积,bh为状态门的偏置;ot为t时刻时间卷积运算的输出。
44、上述进一步方案的有益效果为:通过卷积运算对隧道上部署的das传感器捕获的时间和空间信息进行编码,获得到更多的时空信息,提高了入侵作业分类的准确率。
45、综上,本发明的有益效果为:
46、1、光纤声学传感器能监测多种信号,例如温度、压力和震动频率,因此,本发明提出的强分类器模型是从温度、压力和震动频率多方面判定地铁隧道是否受到外部危害作业入侵,识别错误率低,且无需设置多种传感器设备,需要部署的设备数量少,维护成本和维护难度低;
47、2、本发明通过光纤声学传感器监测地铁隧道上的传感数据,传感数据相比于车辆视觉系统监测范围更高,灵敏度更高,且能直接探测地铁隧道上的多种数据,因此,相比于车辆视觉系统,本发明能够准确地识别出隧道外部作业是否对隧道存在危害,实现对运行车辆以及管控人员进行提前预警;
48、3、本发明通过首先分类出干扰特征量和入侵特征量,然后利用先进的机器学习方法,即:时间卷积和空间卷积操作,对危害作业进行识别,极大地提升了危害作业识别的准确率,达到提前预警减少财产损失的目的。
- 还没有人留言评论。精彩留言会获得点赞!