用于数据眼镜中的姿态确定的方法和装置与流程
本发明涉及一种——特别是用于在机动车中使用的——用于增强现实显示的数据眼镜。本发明还涉及一种用于在数据眼镜的显示面上接触模拟地表示信息对象的措施。
背景技术:
1、数据眼镜(也称为头戴式显示器)是已知的,所述数据眼镜可以借助于显示装置在数据眼镜的佩戴者的视野中在一个或多个显示面上显示图像。显示面可以对应于反射面,其将图像指向数据眼镜的佩戴者的眼睛。数据眼镜的观察开口是透明的,从而可以通过数据眼镜以习惯的方式感知真实的环境。显示面位于观察开口中,从而可以与环境的感知叠加地显示要显示的信息(例如文本、符号、图形、视频显示以及诸如此类)。
2、所述信息通常可以接触模拟地表示给数据眼镜的佩戴者,亦即如此表示,使得所述信息作为确定的配设的环境位置的信息对象叠加在真实环境中或者以该环境位置为取向,或者使得要显示的信息对象以数据眼镜或其佩戴者的确定的定向来显示。此外,可以如此表示接触模拟的信息对象,使得该信息对象相对于真实环境中的对象或环境位置在透视上看起来是正确的,亦即产生如下错觉,即已经给真实环境的环境对象或环境位置实际上补充了虚拟信息对象的附加的特征。
3、然而,为了相应地在数据眼镜的显示面上接触模拟地显示信息对象,必要的是,知道环境位置(应针对该环境位置表示信息对象)和用户的视向。在佩戴数据眼镜时,用户的视向通常固定地与数据眼镜姿态、亦即数据眼镜的空间位置以及空间取向相配设。特别地,为了在数据眼镜的显示面上的无抖动地表示接触模拟的信息对象,对数据眼镜的始终可靠的姿态确定来说特别的要求是必要的。
4、由于尽可能低延迟的检测和快速的姿态更新的原因,对数据眼镜的姿态的确定经常借助于眼镜内部的姿态识别单元来提供。姿态识别单元通常具有惯性传感装置和例如以微处理器形式的运算机构。借助于惯性传感装置,可以检测以加速度的形式的运动且将其通过积分换算为数据眼镜的当前姿态。集成在数据眼镜中的这种姿态识别单元由于积分而具有增大的姿态识别误差,该姿态识别误差可以借助于在数据眼镜外部设定的姿态识别来校正。
5、该外部姿态识别例如可以是基于相机的且特别是使用内部空间相机,该内部空间相机指向数据眼镜的佩戴者的头部。内部空间相机检测数据眼镜的佩戴者的头部,且通过对相机图像的分析处理可以求取头部的姿态且从其中导出数据眼镜的姿态,或者可以直接求取数据眼镜的眼镜姿态。在这些所谓的外向内追踪系统中存在的困难在于,将在数据眼镜之外求取的绝对的姿态说明(特别是在无线通信连接的情况下)以足够低的延迟传送给数据眼镜,从而数据眼镜可以相应地无延迟地或以非干扰的延迟输出接触模拟的表示。
6、在内向外追踪中,数据眼镜相机检测沿驾驶员或车辆乘客的视向的环境区域,该环境区域包括车辆内部空间的各部分以及通过透明的窗户也包括车辆环境。内向外追踪属于用于数据眼镜的目前最常用的追踪方法且在静止环境中足够好地运行。
7、为了在车辆坐标系中追踪具有预定的固定位置的边缘或结构(特别是在车辆在其环境中运动的情况下),由于环境对象相对于车辆或相对于内部空间的各部分的运动可能导致错误识别,所述环境对象与数据眼镜的内向外追踪所设计针对的结构具有类似的轮廓。因此,特别是在可动的平台上,数据眼镜相机的相机图像只能以较低的可靠性被分析处理,因为数据眼镜相机必须分析处理具有不同的运动速度的对象,特别是如果数据眼镜的佩戴者除了车辆的运动之外还进行头部运动。
技术实现思路
1、因此本发明的任务在于,提供一种用于改善数据眼镜的内向外追踪的方法,以用于确定所述数据眼镜在车辆内部空间中的姿态,该方法具有提高的可靠性。
2、该任务通过按照权利要求1的用于确定在车辆中的数据眼镜的姿态的方法以及通过按照并列权利要求的数据眼镜来解决。
3、其他设计方案在从属权利要求中提出。
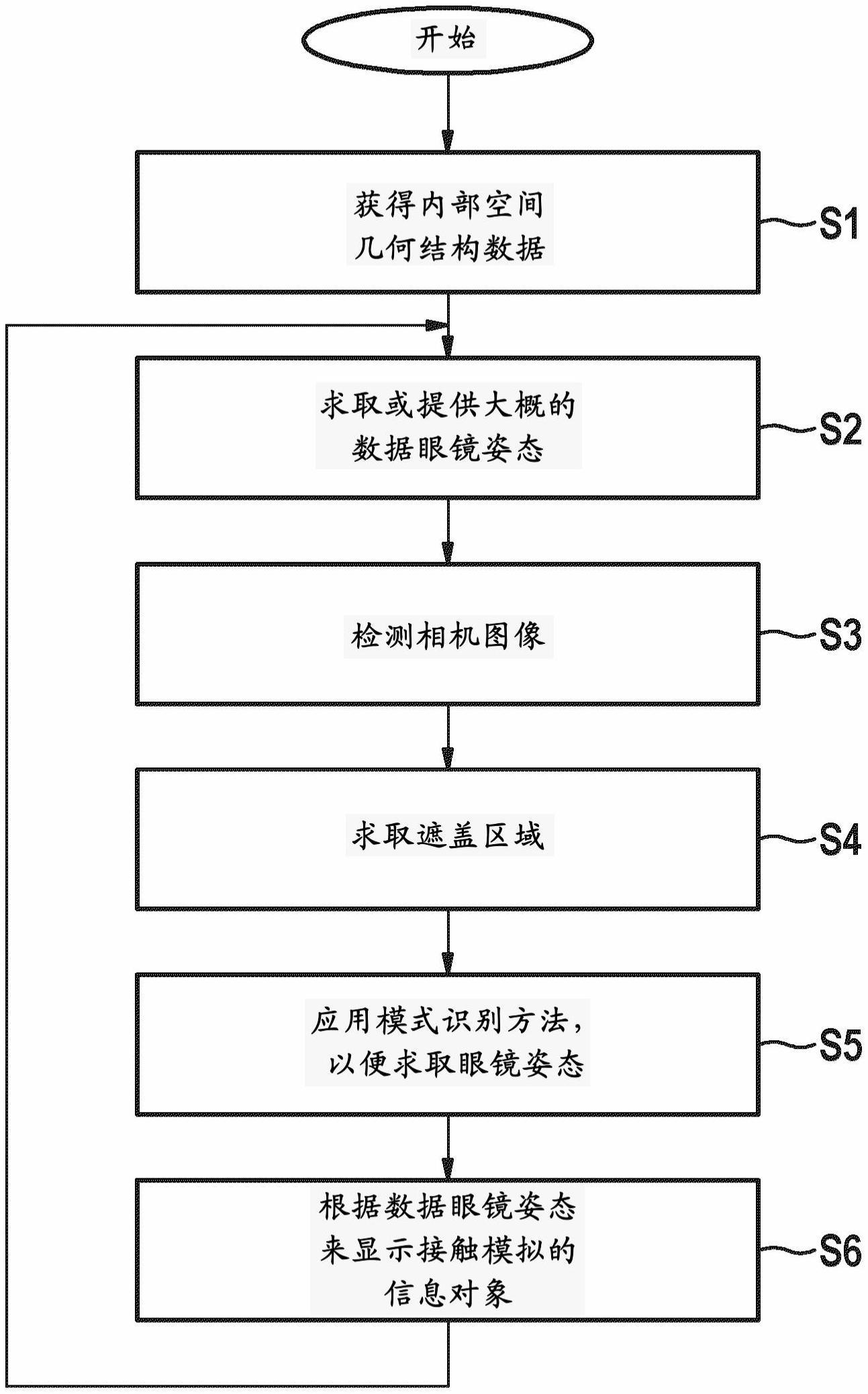
4、按照第一方面,提供了一种用于运行用于根据车辆内部空间中的数据眼镜姿态在显示面上增强显示信息对象的数据眼镜的方法,其中,数据眼镜姿态通过对设定的至少一个标记或设定的至少一个对象进行内向外追踪来实现,该至少一个标记或至少一个对象能通过计算机支持的模式识别方法定位,该模式识别方法应用于数据眼镜相机的相机图像,从而相对于车辆内部空间的数据眼镜姿态能够根据所定位的所述至少一个标记或所述至少一个对象的位置、大小和/或定向来确定,对于模式识别方法考虑仅仅在遮盖区域之外的相机图像。
5、遮盖区域可以如此构成,使得该遮盖区域排除透明的玻璃/窗和/或在车辆内部空间中可动的对象。
6、备选地,遮盖区域可以如此构成,使得该遮盖区域仅仅包括透明的玻璃/窗。
7、上述方法涉及内向外追踪,在所述内向外追踪中,数据眼镜相机记录相机图像且将该相机图像借助于简单的图像处理或边缘识别进行分析处理。虽然用于对相机图像进行分析处理的算法可以几乎“实时”地识别标记和对象的简单结构,但是为此需要的运算能力仍然极大,这使得在数据眼镜中需要极大的安装空间和高的电池容量。为了降低用于分析处理相机图像的处理性能,按照上述方法规定,仅在确定的图像区域中对相机图像进行分析处理。为此,将相机图像用遮盖区域遮盖,且只有在遮盖区域之外的相机图像的图像数据用于分析处理。
8、特别地,遮盖区域可以从车辆的内部空间几何结构导出,该内部空间几何结构由所涉及的车辆的cad模型的内部空间几何结构数据来提供。于是,追踪可以仅仅针对在所选择的区域中(例如在车辆内部空间中或者在车辆环境中)的标记和对象的结构来实施,由此用于模式识别方法的运算耗费显著降低,因为在计算中省略了大面积的区域,如透明的区域(玻璃和窗)或者仪表板。
9、遮盖区域由内部空间几何结构和数据眼镜的大概的姿态产生,该大概的姿态例如可以从数据眼镜的最近求取的姿态、初始姿态和/或基于来自对惯性传感装置的运动信息的分析处理而导出。
10、这样,遮盖区域可以包括在车辆内部空间中透明的区域和可动的对象(例如方向盘),从而模式识别方法仅考虑在车辆内部空间中固定的区域。由此,内向外追踪可以求取车辆坐标系中的数据眼镜姿态。基于大概的数据眼镜姿态和内部空间的内部空间几何结构数据可以求取遮盖区域以用于对数据眼镜相机的相机图像进行分析处理,该遮盖区域隐没车辆的透明的玻璃以及可动的对象(例如手动挡位选择器或方向盘),从而仅位置固定地安装在车辆内部空间中的对象可用于姿态确定。这能实现在检测相机图像的时刻相对于车辆坐标系准确地确定数据眼镜姿态。
11、备选地,遮盖区域可以包括在车辆内部空间中的所有结构和对象,从而模式识别方法仅考虑在车辆之外的区域,所述车辆之外的区域可通过车辆开口和透明的区域(如窗和玻璃)感知。特别地,由此所述内向外追踪可以在环境坐标系中(亦即相对于车辆外部的环境)求取数据眼镜姿态。因此,遮盖区域也可以仅选择外部车辆环境的通过车辆内部空间的玻璃可见的区域。由此,将数据眼镜追踪到位于车辆的环境区域中的标记或对象是可能的,从而将数据眼镜姿态追踪到环境固定的(世界固定的)坐标系(环境坐标系)是可能的。
12、上述方法能实现极大地降低对于分析处理相机图像所需要的运算性能且因此可以有助于在数据眼镜中更高效且更可靠地构成姿态求取。
13、可以规定,当数据眼镜在车辆中启用时或紧接着在启用之后,所述内部空间几何结构数据从车辆的辅助系统传送给数据眼镜,其中,所述内部空间几何结构数据说明所涉及的车辆的内部空间几何结构。
14、可以基于最初预定的数据眼镜姿态或最近求取的数据眼镜姿态将遮盖区域应用于相机图像上。为此,遮盖区域如此通过相机图像的环境图像局部来设置,如所述相机图像对应于其取向。例如,将应遮盖可动的方向盘的遮盖区域的部分如此应用于相机图像上,使得在相机图像中示出的方向盘被遮盖区域的所涉及的部分遮盖。
15、按照另一方面,提供了一种用于增强显示信息对象的数据眼镜,所述数据眼镜包括:
16、-显示面,所述显示面构成为,增强地显示信息对象;
17、-数据眼镜相机,所述数据眼镜相机构成为,检测具有至少一个设定的标记或至少一个设定的对象的相机图像;
18、-控制单元,所述控制单元构成为,
19、--用遮盖区域遮盖相机图像,且借助于计算机支持的模式识别方法来分析处理经遮盖的相机图像,以便定位所述至少一个标记或所述至少一个对象;
20、--通过内向外追踪,根据与在经遮盖的相机图像中所定位的所述至少一个标记或所定位的所述至少一个对象有关的位置、大小和/或定向来求取数据眼镜姿态;其中,对于模式识别方法考虑仅仅在遮盖区域之外的相机图像;以及
21、--根据数据眼镜姿态在显示单元上输出信息对象。
- 还没有人留言评论。精彩留言会获得点赞!