用于最小化环境光校正图像中的误差的方法和图像捕获装置与流程
本发明涉及一种用于最小化环境光校正(alc)图像中的误差的方法以及用于该方法的图像捕获装置。
背景技术:
1、由相机或图像捕获装置捕获的物体的图像通常由环境光以及单独的照明源照明。为了能够准确地比较同一物体的图像、或者确定物体的颜色,必须对环境光进行校正以产生环境光校正图像。然而,这样的图像通常是通过比较捕获图像的像素来生成的,这在帧之间存在物体的任何移动时会引入误差。
2、us2004/080623公开了用于最小化图像生成设备中的运动杂波的系统和方法。时间交错图像相减减少了运动杂波的大小,并且对静态图像的期望环境光消除没有不利影响。
技术实现思路
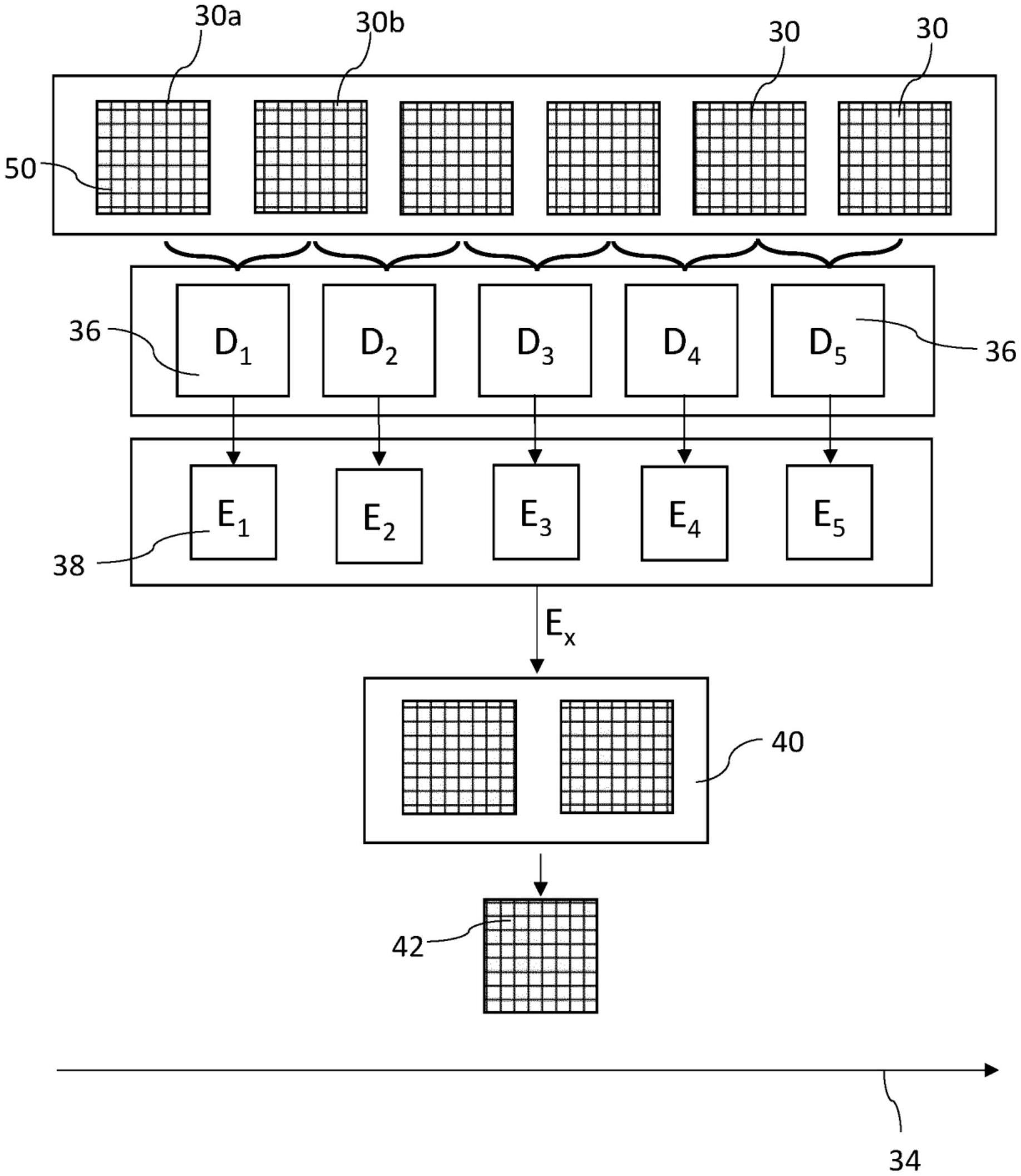
1、根据第一具体方面,提供了一种用于最小化环境光校正图像中由于运动引起的误差的方法,该方法包括:捕获具有随时间变化的受控照明强度的多个主图像;估计针对多个主图像的多个子集中的每个子集的、由于运动引起的误差值;以及对具有最低估计误差值的主图像的误差最小化子集执行环境光校正,以生成具有最小化误差的环境光校正(alc)图像;其中针对估计多个主图像的每个子集的误差值包括:标识子集中一对主图像,该一对主图像包括第一主图像和第二主图像,其中第一主图像在时间上是在第二主图像之前捕获的;确定该对主图像之间的位移矢量矩阵,包括:将第一主图像划分为多个第一网格元素并且将第二主图像划分为多个第二网格元素,将第一网格元素与对应于对象上的相同位置的第二网格元素相匹配,以及确定每个匹配的第一网格元素与第二网格元素之间的位移矢量,以确定描述每个网格元素的位移矢量的位移矢量矩阵;以及基于该对主图像之间的位移矢量矩阵,估计针对主图像的子集的误差值。
2、估计针对主图像的子集的误差值可以包括:在针对该对主图像的位移矢量矩阵中选择最大位移矢量,并且基于最大位移矢量估计误差值。
3、估计针对主图像的每个子集的误差值可以包括:标识子集中的多对主图像;确定针对每对主图像的位移矢量矩阵;以及基于针对子集中的每对主图像的位移矢量矩阵,估计针对多个主图像的子集的误差值。
4、估计针对多个主图像的子集的误差值可以包括:从针对每对主图像的最大位移矢量中选择最高绝对位移矢量,并且基于主图像的子集中的最高绝对位移矢量,估计误差值。
5、确定时间上相邻的成对主图像之间的位移矢量可以包括:匹配第一网格元素和第二网格元素。确定时间上不相邻的成对主图像之间的位移矢量可以包括:将时间上相邻的成对主图像的位移矢量相加,以映射时间上不相邻的成对主图像之间的运动轨迹。
6、确定每个匹配的第一网格元素与第二网格元素之间的位移矢量可以包括:基于相位相关性执行位移估计。
7、主图像的每个子集可以包括多个时间上相邻的主图像。主图像的每个子集可以从主图像的另一子集偏移一个时间上相邻的主图像。
8、可以对时间上连续的主图像的子集实时执行对针对多个子集中的每个子集的、由于运动引起的误差值的估计。每次针对主图像的子集的估计误差值低于任何先前估计的误差值,该方法可以包括对相应的主图像的子集执行环境光校正,以生成具有最小化误差的alc图像。
9、根据第二方面,提供了一种非暂态计算机可读存储介质,包括计算机可读指令,该计算机可读指令在由处理器执行时引起根据第一方面的方法的执行。
10、根据第三方面,提供了一种计算机程序,该计算机程序在被计算机读取时引起根据第一方面的方法的执行。
11、根据第四方面,提供了一种图像捕获装置,该图像捕获装置包括:至少一个处理器;包括计算机可读指令的至少一个存储器;该至少一个处理器被配置为读取该计算机可读指令并且引起根据第一方面的方法的执行。
12、这些和其他方面将从下文所述的实施例中很清楚并且参考下文所述的实施例进行阐述。
技术特征:
1.一种用于最小化环境光(14)校正图像中由于运动引起的误差的方法,所述方法包括:
2.根据权利要求1所述的方法,其中估计针对所述主图像(30)的所述子集的所述误差值(38)包括:在针对所述一对主图像(30)的所述位移矢量矩阵(36)中选择最大位移矢量(48),并且基于所述最大位移矢量(48)估计所述误差值(38)。
3.根据权利要求1至2中任一项所述的方法,其中估计针对主图像(30)的每个子集的所述误差值(38)包括:
4.根据权利要求2和3所述的方法,其中估计针对所述多个主图像(30)的所述子集的所述误差值(38)包括:从针对每对主图像(30)的所述最大位移矢量(48)中选择最高绝对位移矢量(48),并且基于所述主图像(30)的子集中的所述最高绝对位移矢量(48),估计所述误差值(38)。
5.根据权利要求3至4中任一项所述的方法,其中确定时间上相邻的成对主图像(30)之间的所述位移矢量(48)包括:匹配所述第一网格元素(46)和所述第二网格元素(46),并且其中确定时间上不相邻的成对主图像(30)之间的所述位移矢量(48)包括:将时间上相邻的成对主图像(30)的位移矢量(48)相加,以映射所述时间上不相邻的成对主图像(30)之间的运动轨迹(52)。
6.根据权利要求1至5中任一项所述的方法,其中确定每个匹配的第一网格元素(46)与第二网格元素(46)之间的所述位移矢量(48)包括:基于相位相关性执行位移估计。
7.根据权利要求1至6中任一项所述的方法,其中主图像(30)的每个子集包括多个时间上相邻的主图像(30),并且其中主图像(30)的每个子集从主图像(30)的另一子集偏移一个时间上相邻的主图像(30)。
8.根据权利要求7所述的方法,其中对时间上连续的主图像(30)的子集实时执行对针对多个子集中的每个子集的、由于运动引起的所述误差值(38)的估计,并且每次针对主图像(30)的子集的所估计的所述误差值(38)低于任何先前估计的误差值(38),所述方法包括:对相应的主图像(30)的子集执行环境光(14)校正,以生成具有最小化误差的alc图像(42)。
9.一种非暂态计算机可读存储介质,包括计算机可读指令,所述计算机可读指令在由处理器(16)执行时引起根据权利要求1至8中任一项所述的方法的执行。
10.一种计算机程序,所述计算机程序在被计算机读取时引起根据权利要求1至8中任一项所述的方法的执行。
11.一种图像捕获装置(10),包括:
技术总结
根据一个方面,提供了一种用于最小化环境光校正图像中由于运动引起的误差的方法,该方法包括:捕获具有随时间变化的受控照明强度的多个主图像,估计针对多个主图像的多个子集中的每个子集的、由于运动引起的误差值,以及对具有最低估计误差值的主图像的误差最小化子集执行环境光校正,以生成具有最小化误差的环境光校正(ALC)图像。估计针对多个主图像的每个子集的误差值包括标识子集中包括第一主图像和第二主图像的一对主图像,其中第一主图像在时间上是在第二主图像之前捕获的,确定该对主图像之间的位移矢量矩阵,以及基于该对主图像之间的位移矢量矩阵来估计主图像的子集的误差值。确定位移矢量矩阵包括将第一主图像划分为多个第一网格元素并且将第二主图像划分为多个第二网格元素,将第一网格元素与对应于物体上的相同位置的第二网格元素相匹配,以及确定每个匹配的第一网格元素与第二网格元素之间的位移矢量,以确定描述每个网格元素的位移矢量的位移矢量矩阵。
技术研发人员:M·J·A·阿塞尔曼,M·达莫达兰,Y·P·J·鲍尔奎因,J·A·帕勒洛,R·维哈根
受保护的技术使用者:皇家飞利浦有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!