物体识别装置及物体识别方法与流程
本发明总体来说涉及存在于容器中的物体的识别。
背景技术:
1、以往,在物流等领域中,在仓库中设有基于订单从保管箱取出商品的机器人。在保管箱中以各种各样的装货方式保管有相同种类的物体,因此机器人需要推定商品的姿势和商品的尺寸。在不知道商品的姿势的情况下,机器人例如无法实施使自身的手部向想要抓持的商品不碰撞地接近的动作。另外,在不知道商品的尺寸的情况下,机器人例如无法实施在抓持住商品后一边避开其他商品等障碍物一边取出该商品的动作。
2、近年来,已知一种使用商品的模型来推定商品的姿势及尺寸的方法。在该方法中,由于持有商品的模型,所以商品的尺寸已知,从而无需推定商品的尺寸。但是,由于必须针对商品的一个个种类创建商品的模型,所以若商品的种类增多,则会导致商品的模型的创建花费工时。
3、在这方面,公开了一种能够以较少的运算量识别随机堆积的工件的位置姿势、另外能够使用控制信息少的scara机器人的位置姿势识别装置(参照专利文献1)。根据位置姿势识别装置,将抓持对象的工件限定成大致圆柱形状,并从随机堆积的状态下的工件的三维图像生成点群数据,基于点群数据计算出工件的尺寸和位置姿势,因此无需事先准备模型等。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2020-34526号公报
技术实现思路
1、发明所要解决的课题
2、在专利文献1所记载的技术中,基于大致圆柱状的工件这样的原型形状的信息,针对输入数据进行原型形状的拟合,推定物体的姿势及尺寸。但是,具有如下问题:即使物体的一部分隐藏也能够高精度地拟合原型形状的情况也较多,且不存在成为基准的物体模型,因此无法判断推定出的物体的尺寸是否正确。
3、本发明是考虑以上方面做出的,意欲提出一种即使不存在成为基准的物体模型也能够高精度地识别物体的物体识别装置等。
4、用于解决课题的方案
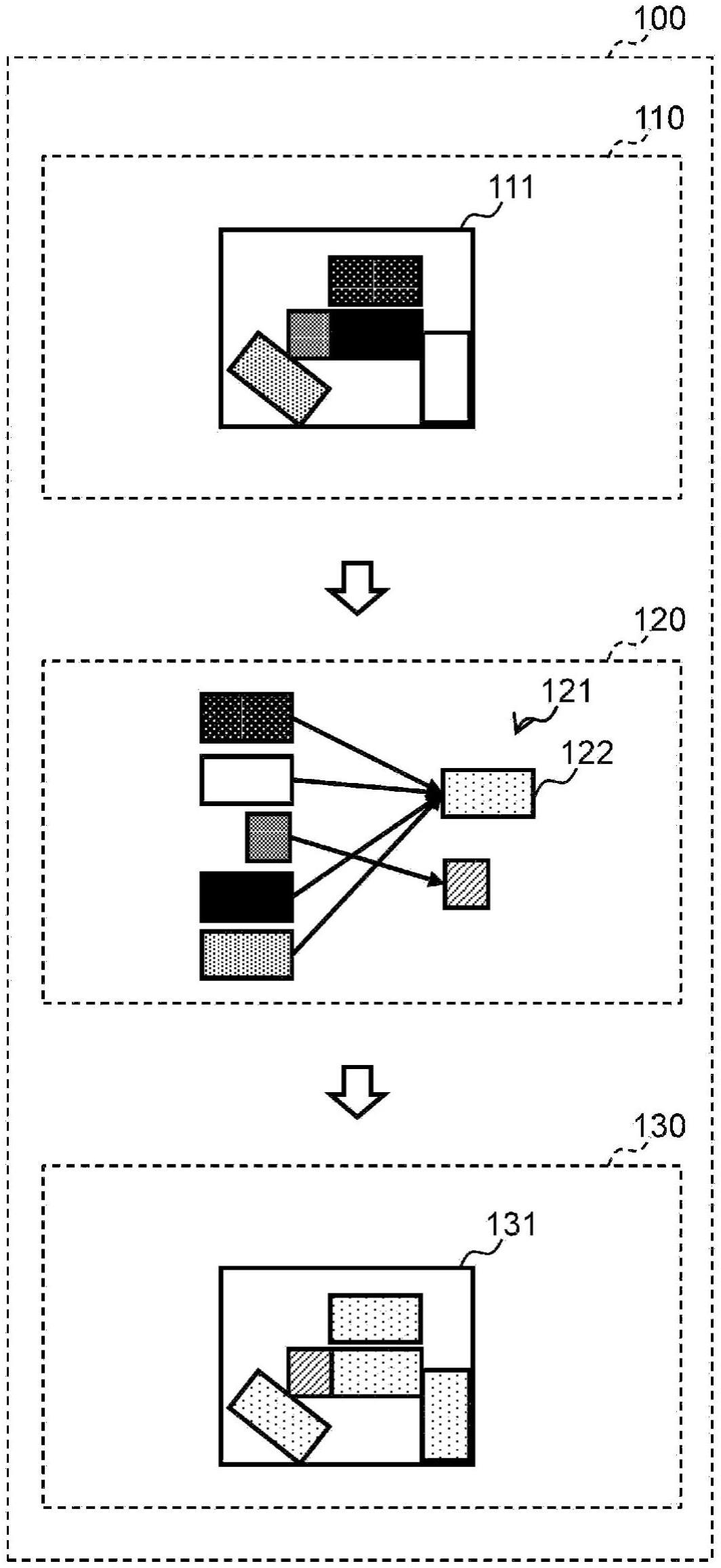
5、为了解决该课题,在本发明中设有:输入部,其输入表示保管物体的容器中的规定场景的状态的场景信息;处理部,其基于由上述输入部输入的场景信息,按照每种尺寸分选存在于上述容器中的物体,并基于分选出的每种尺寸的物体的数量,进行检测不允许在上述容器中保管的尺寸的物体的处理;和输出部,其输出基于上述处理部实施的处理的结果。
6、在上述结构中,基于每种尺寸的物体的数量,检测不允许在容器中保管的尺寸的物体,因此例如即使没有成为基准的物体模型,也能够将不允许在该容器中保管的尺寸的物体从该容器排除。
7、发明效果
8、根据本发明,即使不存在成为基准的物体模型,也能够高精度地识别物体。
技术特征:
1.一种物体识别装置,具备:
2.如权利要求1所述的物体识别装置,其中,
3.如权利要求1所述的物体识别装置,其中,
4.如权利要求3所述的物体识别装置,其中,
5.如权利要求3所述的物体识别装置,其中,
6.如权利要求1所述的物体识别装置,其中,
7.如权利要求6所述的物体识别装置,其中,
8.如权利要求7所述的物体识别装置,其中,
9.如权利要求8所述的物体识别装置,其中,
10.如权利要求1所述的物体识别装置,其中,
11.如权利要求1所述的物体识别装置,其中,
12.如权利要求1所述的物体识别装置,其中,
13.一种物体识别方法,包括:
技术总结
本发明设有:输入部,其输入表示保管物体的容器中的规定场景的状态的场景信息;处理部,其基于由上述输入部输入的场景信息,按照每种尺寸分选存在于上述容器中的物体,并基于分选出的每种尺寸的物体的数量,进行检测不允许在上述容器中保管的尺寸的物体的处理;和输出部,其输出基于上述处理部实施的处理的结果。
技术研发人员:坂井亮,木村宣隆
受保护的技术使用者:株式会社日立制作所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!