用于监控货舱的方法与流程
本发明涉及一种用于监控货舱的方法,其中,利用一个或多个设置在货舱的内部中的测距的传感器三维丈量至少一个限界出货舱的面,其中,由一个传感器或多个传感器以3d数据的形式检测测量点或测量点集的当前的距离作为测量值,并且测量值借助在计算或评估单元中编程的算法被处理,并且与预设的阈值或预期出现测量值的图案进行比较并且进行分类,并且其中,在当前的测量值或3d数据与预期的测量值或3d数据之间有预设的偏差时提供能进一步处理的信号。
背景技术:
1、如果在此和随后提到“传感器”或“至少一个传感器”,那么该传感器可以是单个传感器,也可以是多个传感器中的一个、多个或全部。
2、术语“预期的测量值”在此涉及以下测量值:这些测量值表征货舱的存在的和基于货舱的几何形状已知的边界面。因此,例如在货舱内的传感器的同样已知的和预设的安装或紧固位置中,货舱的边界面、即地板、壁或顶产生测量值或测量值的图案,它们可以明确地配属于货舱的常见的边界面,并且因此在货舱的所有新的丈量中确定随后获知的(新的)测量值的预期范围。
3、货舱监控的特别重点是门区域的管控,在此尤其是货舱的门的状态的检测。检查门是否关闭例如对于冷链运输或敏感的货物或动物等的运输来说是重要的,尤其是对于防止盗窃或未经授权接近货物来说是重要的。
4、用于门、货舱的常规的监控系统、例如门上的磁性的开关触点作为固定安装的系统已知,其只能检查二进制状态,即能够确定门是关闭的还是打开的。利用这些系统无法检测门的特定的打开角度或打开的时间进程。这种开关触点此外并且通常固定地安装在关闭机构或锁中,并且因此固定地与相应的车辆或集装箱连接。
5、此外,在这样的监控系统中,每个门或每个门扇设有相应的触点,其因此必须安装在相应多个门或门扇中。
6、在现有技术中还已知多个系统,其可以借助传感器和相关联的计算和评估单元来识别装载状况以及货舱门的状态。
7、为此,us 7,940,955 b2公开了一种单目广角图像检查系统,其借助算法(常驻软件例程),在曲率校正之后对数据处理装置(数字信号处理器)中的数字图像进行边界值或边界面分析,以便此外识别门的“打开”或“关闭”状态。
8、然而,为此通过摄像头产生的图像是三维空间的平面的图示,并且此外通过单个颜色像素的亮度分析来评判。然而,这种平面图像形式的起点不适用于进一步的分析,并且不适用于关于所考虑的空间的空间特性,即三维特性的可能的说明。
技术实现思路
1、因此,本发明的任务是,提供一种改进的货舱监控,其通过三维观察方式正确评价实际存在的空间条件,该三维观察方式尤其可以识别从属于货舱的门的状况,并且此外可以为基于三维数据的进一步的分析和状况确定提供基础。
2、该任务通过独立权利要求的特征来解决。在从属权利要求中公开了另外的有利的构造。
3、在此,至少一个在货舱中设置的测距的传感器在表示限界出货舱的三维门表面与传感器的预期距离的测量点或测量点集的区域中或方向中分别检测测量点的当前的距离作为3d数据形式的测量值。
4、作为测距的传感器设置有所谓的深度感知传感器(depth-aware sensor),借助该深度感知传感器可以对测量点进行三维丈量,即基于与传感器的距离和方向进行丈量,例如利用相应的空间坐标和距离数据(3d数据)。
5、在计算或评估单元中编程的算法被构造为使得在检测到的距离表示描述货舱外的三维表面的测量点或测量点集的情况下,识别出“门打开”状态,并且提供相应的能进一步处理的第一信号。
6、在替选的情况下,在其中检测到的距离表示不描述货舱外的三维表面的测量点或测量点集,由算法识别出“门关闭”状态,并提供相应的能进一步处理的第二信号。
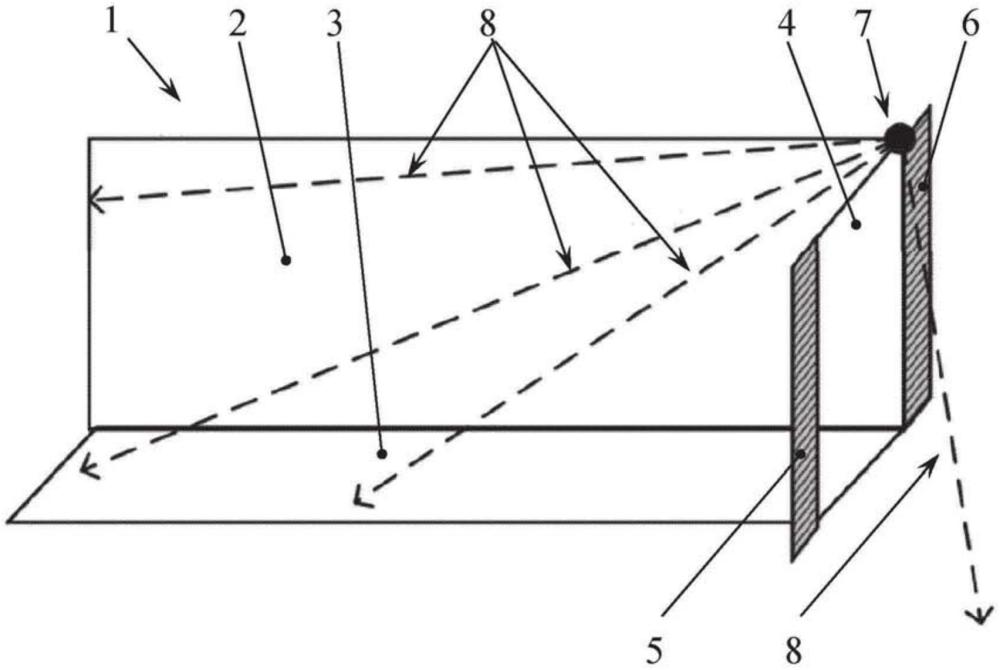
7、因此,根据本发明的方法与一个或多个深度感知的测距的传感器一起工作,这些传感器安装在货舱内,从而使得整个货舱或至少货舱的待观察的区域位于传感器的测量范围内。这样的传感器可以用于检测货舱内的装载物,并且因此也总是被安置为使得货舱的布置有门的表面区域也位于测量范围内。因此,与门区域相关的测量值可以用作深度信息,以便更精确地确定门的状况。在此,测量值当然可以以数字3d数据的形式存在,其也可以组合以形成适用于特别要考虑的测量点集的数据集、即所谓的数据簇,例如用于门区域/门的数据簇。
8、在此,根据本发明的方法利用存在或不存在借助3d数据簇描述的货舱外的表面的测量点集。简单地说,传感器在货舱门的方向上“观察”,并且确认:在其后面,即在货舱外部,通过3d数据是否获知有表面结构。
9、有利的改进方案是,算法被构造为使得:在检测到的距离表示描述货舱外的三维表面的测量点或测量点集的情况下,如果不能获知表示限界出货舱的三维门表面与传感器的预期距离的测量点或测量点集,那么识别出“门打开”状态,并且在检测到的距离表示不描述货舱外的三维表面的测量点或测量点集的替选情况下,如果能至少部分获知表示限界出货舱的三维门表面与传感器的预期距离的测量点或测量点集,那么识别出“门关闭”状态。
10、在此附加地检查:另外的测量点集或另外的测量点、即描述可能实际存在的门表面的另外的测量点或另外的测量点集是否在预期范围内出现。根据相应的3d数据的存在与否,再次验证货舱外的三维表面的存在与否,或者进行合理性检查。由此,在关于门状态的实际结论中实现非常高的安全性。
11、另一有利的构造方案是,该算法被构造为使得表示限界出货舱的三维门表面与传感器的预期距离的测量点或测量点集被彼此相关联地评估,其中,在测量点彼此间及与预期距离有预先确定的偏移和距离时,识别限制出的三维门表面的角度姿态,并且提供门的打开角度作为能进一步处理的第三信号。在冷链货舱中装载和卸载冷链货物期间,对货舱的仅成角度的门的识别例如是重要的。于是可以避免太长的或太大的成角度的打开并且进而可以避免能量损耗。
12、在监控从属于车辆的货舱时的另一有利的构造方案是,在检测到的距离表示描述货舱外的位于与货舱地板基本上相同的高度上的三维表面的测量点或测量点集的情况下,识别出“门打开”且“具有货舱的车辆位于装卸平台处”的状态,并且提供相应的能进一步处理的第四信号。合理的是,结合打开的门识别出装卸平台位置对于在装载过程期间的状态识别来说是重要的并且例如可以用于防止在所有门关闭之前车辆从该位置开动。
13、这类似地适用于另一有利的构造方案,其在于,在检测到的距离表示描述货舱外的基本上位于货舱地板的高度之下的三维表面的测量点或测量点集的情况下,识别出“门打开”且“具有货舱的车辆没有位于装卸平台处”的状态,并且提供相应的能进一步处理的第五信号。在相应快速地处理传感器信号时,在此甚至可能的是,在接近后面的装卸平台处时发出警告或碰撞指示。
14、另一有利的构造方案是,传感器仅在限界出货舱的三维门表面的预期距离的部分范围内检测测量点的当前的距离作为测量值,并且在检测到的距离表示描述货舱外的三维表面的测量点或测量点集的情况下,识别出“门局部打开”状态,并且提供相应的能进一步处理的第六信号。因此可以识别打开方式,其中,仅打开门的一部分、例如门的左边、右边、上方或下方的部分。在卡车(其门部分通过可移动的装卸平台形成)中例如可以识别出,门的上方的部分已经是打开的而装卸平台是否仍是关闭的,或相反。
15、另一有利的构造方案是,传感器构造为光学深度传感器,优选构造为飞行时间摄像头(tof摄像头)或立体摄像头。例如,tof摄像头为每个像素提供其上成像的对象的远近。在此可以一次拍摄整个场景,而不必单独扫描,这当然会导致更快地处理相应的信号。当然,根据应用也有利的是,传感器构造为激光雷达传感器或激光扫描仪,其对于光栅化的扫描是更便宜的替选方案。
16、另一有利的构造方案是,评估表征测量点或测量点集的距离的测量值的随时间的变化走向。因此,在相应更快处理信号时,可以特别好地追溯事件的时间历史或进程。
17、用于监控货舱以执行根据本发明的方法的装置有利地构造为使得该装置具有用于三维丈量至少一个限界出货舱的面的至少一个测距的传感器和具有编程的算法的计算或评估单元,利用该算法,按照根据本发明的方法处理由传感器检测到的测量值,其中,传感器布置在限界出货舱的并且具有门的货舱壁上,即布置在也包含门表面的限界出货舱的面上。这种传感器位置使位于货舱外的并且待获知的表面能特别好地被识别。表示门表面的测量点或测量点集的3d数据的附加的获知特别好地利用另外的有利的构造来实现,其中,传感器面对限界出货舱的并且具有门的货舱壁布置,即布置在限界出货舱的与门表面相对置的面上。
18、当然,多个传感器也可以布置在上述的货舱壁中的另一个上。相应比较式评判和处理多个布置在货舱中的不同部位上的传感器的结果也导致更准确的说明。
19、根据本发明的方法和特别适合的装置以特别的方式适用于具有货舱的车辆、例如卡车、挂车或货车列车。也可以非常好地用于在其他的车辆中被运输的集装箱中。在此,相应的车辆或集装箱具有货舱,在货舱中设置有至少一个测距的传感器,其用于三维丈量至少一个限界出货舱的面,其中,车辆或集装箱或容纳集装箱的车辆此外具备带有编程的算法的计算或评估单元,利用算法,按照根据本发明的方法处理由传感器检测到的测量值。
- 还没有人留言评论。精彩留言会获得点赞!