用于将符号分配给对象的系统和方法与流程
背景技术:
1、本技术涉及成像系统,包括被配置成用于获取和分析对象或符号(例如,条形码)的图像的机器视觉系统。
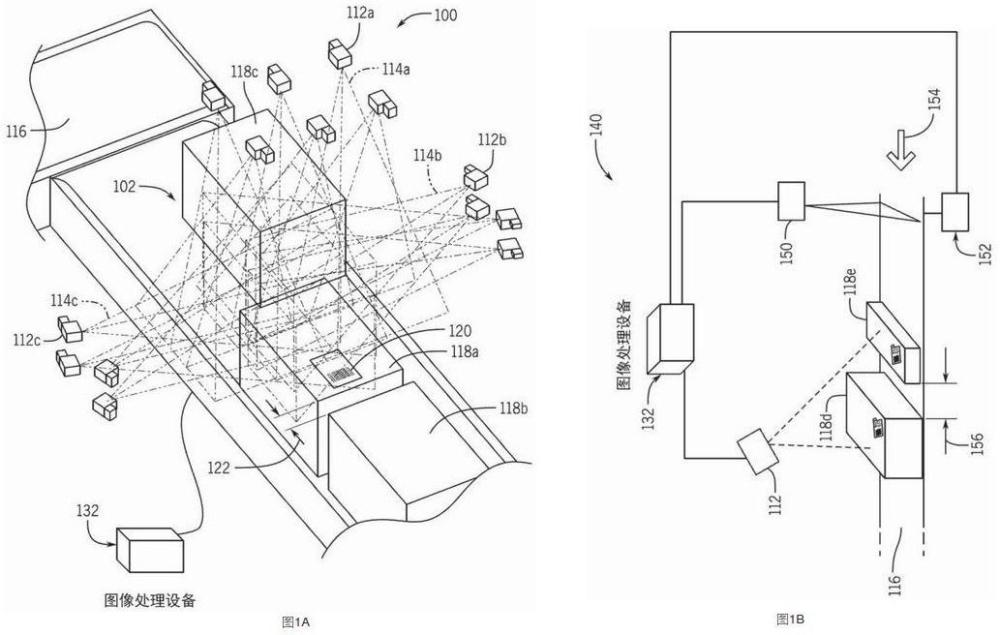
2、机器视觉系统通常被配置成用于捕获对象或符号的图像并分析图像以标识对象或解码符号。因此,机器视觉系统通常包括用于图像采集和图像处理的一个或多个设备。在常规应用中,这些设备可以用于获取图像,或用于分析所获取的图像,诸如出于解码成像的符号(诸如条形码或文本)的目的。在一些情况下,机器视觉和其他成像系统可以用于获取可能大于对应成像设备的视场(fov)和/或可能相对于成像设备移动的对象的图像。
技术实现思路
1、根据实施例,一种用于将符号分配给图像中的对象的方法,包括:接收由成像设备捕获的图像,其中符号可以位于图像内。该方法进一步包括:在第一坐标系中接收一个或多个点的三维(3d)位置,3d位置与指示图像中的对象的3d姿态的姿态信息相对应;将对象的一个或多个点的3d位置映射到图像内的2d位置;以及基于图像中的符号的2d位置和图像中的对象的一个或多个点的2d位置之间的关系来将符号分配给对象。在一些实施例中,映射基于第一坐标空间中的一个或多个点的3d位置。
2、在一些实施例中,该方法可以进一步包括:基于图像内的对象的一个或多个点的2d位置来确定对象的表面;以及基于图像中的符号的2d位置与对象的表面之间的关系将符号分配给对象的表面。在一些实施例中,该方法可以进一步包括:确定符号与多个图像相关联;聚合多个图像中的每个图像的符号的分配;以及确定符号的分配中的至少一个分配是否与符号的剩余分配不同。在一些实施例中,该方法可以进一步包括:基于图像的成像数据来确定图像中的对象的边缘。在一些实施例中,该方法可以进一步包括:确定符号分配的置信分数。在一些实施例中,一个或多个点的3d位置可以是从3d传感器接收的。
3、在一些实施例中,图像包括多个对象,并且该方法可以进一步包括:确定多个对象在图像中是否重叠。在一些实施例中,图像包括具有带边缘的第一边界的对象和具有带第二边缘的第二边界的第二对象。该方法可以进一步包括:确定第一边界和第二边界在图像中是否重叠。在一些实施例中,一个或多个点的3d位置是在第一时间获取的,并且图像是在第二时间获取的。将一个或多个点的3d位置映射到图像内的2d位置可以包括将一个或多个点的3d位置从第一时间映射到第二时间。在一些实施例中,姿态信息可以包括将一个或多个点的3d位置映射到图像内的2d位置包括将一个或多个点的3d位置从第一时间映射到第二时间。在一些实施例中,姿态信息可以包括点云数据。
4、根据另一实施例,一种用于将符号分配给图像中的对象的系统,该系统包括:校准成像设备,该校准成像设备被配置成用于:捕获图像;以及处理器设备。处理器设备可以被编程用于:接收由校准成像设备捕获的图像,其中符号位于图像内;在第一坐标系中接收一个或多个点的三维(3d)位置,3d位置与指示图像中的对象的3d姿态的姿态信息相对应;将对象的一个或多个点的3d位置映射到图像内的2d位置;以及基于图像中的符号的2d位置与图像中的对象的一个或多个点的2d位置之间的关系将符号分配给对象。在一些实施例中,映射基于第一坐标空间中的一个或多个点的3d位置。
5、在一些实施例中,系统进一步包括:传送器,传送器被配置成用于支撑和运送对象;以及运动测量设备,运动测量设备耦合到传送器并且被配置成用于测量传送器的移动。在一些实施例中,系统可以进一步包括:3d传感器,该3d传感器被配置成用于测量一个或多个点的3d位置。在一些实施例中,姿态信息可以包括第一坐标空间中的对象的角。在一些实施例中,姿态信息可以包括点云数据。在一些实施例中,处理器设备可以被进一步编程成用于:基于图像内的对象的一个或多个点的2d位置来确定对象的表面;以及基于图像中的符号的2d位置与对象的表面之间的关系将符号分配给对象的表面。在一些实施例中,处理器设备可以被进一步编程成用于:确定符号与多个图像相关联;聚合多个图像中的每个图像的符号的分配;以及确定符号的分配中的至少一个是否与符号的剩余分配不同。
6、在一些实施例中,图像可以包括多个对象,并且处理器设备可以被进一步编程用于确定多个对象在图像中是否重叠。在一些实施例中,图像可以包括具有带边缘的第一边界的对象和具有带第二边缘的第二边界的第二对象。处理器设备可以被进一步编程用于:确定第一边界和第二边界在图像中是否重叠。在一些实施例中,将符号分配给对象可以包括将符号分配给表面。
7、根据另一实施例,一种用于将符号分配给图像中的对象的方法,该方法包括:接收由成像设备捕获的图像。符号可以位于图像内。方法进一步包括:在第一坐标系中接收一个或多个点的三维(3d)位置,该3d位置与指示一个或多个对象的3d姿态的姿态信息相对应;将对象的一个或多个点的3d位置映射到第二坐标空间中的图像内的2d位置;基于第二坐标空间中的图像内的对象的一个或多个点的2d位置来确定对象的表面;以及基于图像中的符号的2d位置与图像中的对象的一个或多个点的2d位置之间的关系将符号分配给表面。在一些实施例中,将符号分配给表面可以包括确定表面和图像在第二坐标空间中的交集。在一些实施例中,该方法可以进一步包括:确定符号分配的置信分数。在一些实施例中,映射基于第一坐标空间中的一个或多个点的3d位置。
技术特征:
1.一种用于将符号分配给图像中的对象的方法,所述方法包括:
2.如权利要求1所述的方法,进一步包括:
3.如权利要求1所述的方法,进一步包括:
4.如权利要求1所述的方法,进一步包括:基于所述图像的成像数据来确定所述图像中的所述对象的边缘。
5.如权利要求1所述的方法,进一步包括:确定所述符号分配的置信分数。
6.如权利要求1所述的方法,其特征在于,所述一个或多个点的所述3d位置是从3d传感器接收的。
7.如权利要求1所述的方法,其特征在于,所述图像包括多个对象,所述方法进一步包括:
8.如权利要求1所述的方法,其特征在于,所述图像包括具有带边缘的第一边界的对象和具有带第二边缘的第二边界的第二对象,并且所述方法进一步包括:
9.如权利要求1所述的方法,其特征在于,所述一个或多个点的所述3d位置是在第一时间获取的,并且所述图像是在第二时间获取的,并且
10.如权利要求1所述的方法,其特征在于,所述姿态信息包括在所述第一坐标空间中的所述对象的角。
11.如权利要求1所述的方法,其特征在于,所述姿态信息包括点云数据。
12.一种用于将符号分配给图像中的对象的系统,所述系统包括:
13.如权利要求12所述的系统,进一步包括:
14.如权利要求12所述的系统,进一步包括:3d传感器,所述3d传感器被配置成用于测量所述一个或多个点的所述3d位置。
15.如权利要求12所述的系统,其特征在于,所述姿态信息包括所述第一坐标空间中的所述对象的角。
16.如权利要求12所述的系统,其特征在于,所述姿态信息包括点云数据。
17.如权利要求12所述的系统,其特征在于,所述处理器设备被进一步编程成用于:
18.如权利要求12所述的系统,其特征在于,至少一个处理器设备被进一步编程成用于:
19.如权利要求12所述的系统,其特征在于,与所述符号相关联的所述图像包括多个对象,并且所述处理器设备被进一步编程用于确定所述多个对象在所述图像中是否重叠。
20.如权利要求12所述的系统,其特征在于,所述图像包括具有带边缘的第一边界的对象和具有带第二边缘的第二边界的第二对象,并且所述处理器设备被进一步编程用于:
21.如权利要求12所述的系统,其特征在于,将所述符号分配给所述对象包括将所述符号分配给表面。
22.一种用于将符号分配给图像中的对象的方法,所述方法包括:
23.如权利要求22所述的方法,其特征在于,将所述符号分配给所述表面包括确定所述表面和所述图像在所述第二坐标空间中的交集。
24.如权利要求22所述的方法,进一步包括:确定所述符号分配的置信度得分。
技术总结
一种用于将符号分配给图像中的对象的方法,包括:接收由成像设备捕获的图像,其中符号可以位于图像内。方法进一步包括:在第一坐标系中接收一个或多个点的三维(3D)位置,3D位置与指示图像中的对象的3D姿态的姿态信息相对应;将对象的一个或多个点的3D位置映射到图像内的2D位置;以及基于图像中的符号的2D位置与图像中的对象的一个或多个点的2D位置之间的关系来将符号分配给对象。
技术研发人员:A·艾尔-巴尔寇基,E·索泰
受保护的技术使用者:康耐视公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!