一种基于概率极值加权函数的多磁性目标三维重建方法
本发明属于磁探测,涉及一种基于概率极值加权函数的多磁性目标三维重建方法。
背景技术:
1、磁异常三维重建技术是通过地下或水下磁性目标所引起的磁异常值,重建磁性目标的物性参数及其空间分布。该技术能有效地探测出磁性目标,广泛应用于反潜、未爆弹药探测、海底结构探测、地下铁磁性管道探测等,具有重要的实用价值。特别是针对水下目标的探测,重建的三维轮廓可以辅助目标识别,进一步提升探索海洋环境的能力。目前,对多个磁性目标的三维重建研究仍处于初级阶段。类似的磁反演技术主要研究在地质勘探中,包括形态反演和物理反演。形态学反演需要预先知道磁化率,这就导致了对未知磁性目标的重建有一定的局限性;而由于磁测数据的误差和先验信息的缺乏,传统的物理反演方法效果也并不理想。
2、因此,亟需一种能够准确实现多目标情况下的三维重建的方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于概率极值加权函数的多磁性目标三维重建方法,针对现有空间分布不均的多个铁磁性目标三维重建方法的不足,解决存在多个目标时,由于磁测数据的误差和先验信息的缺乏情况下的三维重建方面存在准确度低、分辨率差、轮廓不清晰的问题。
2、为达到上述目的,本发明提供如下技术方案:
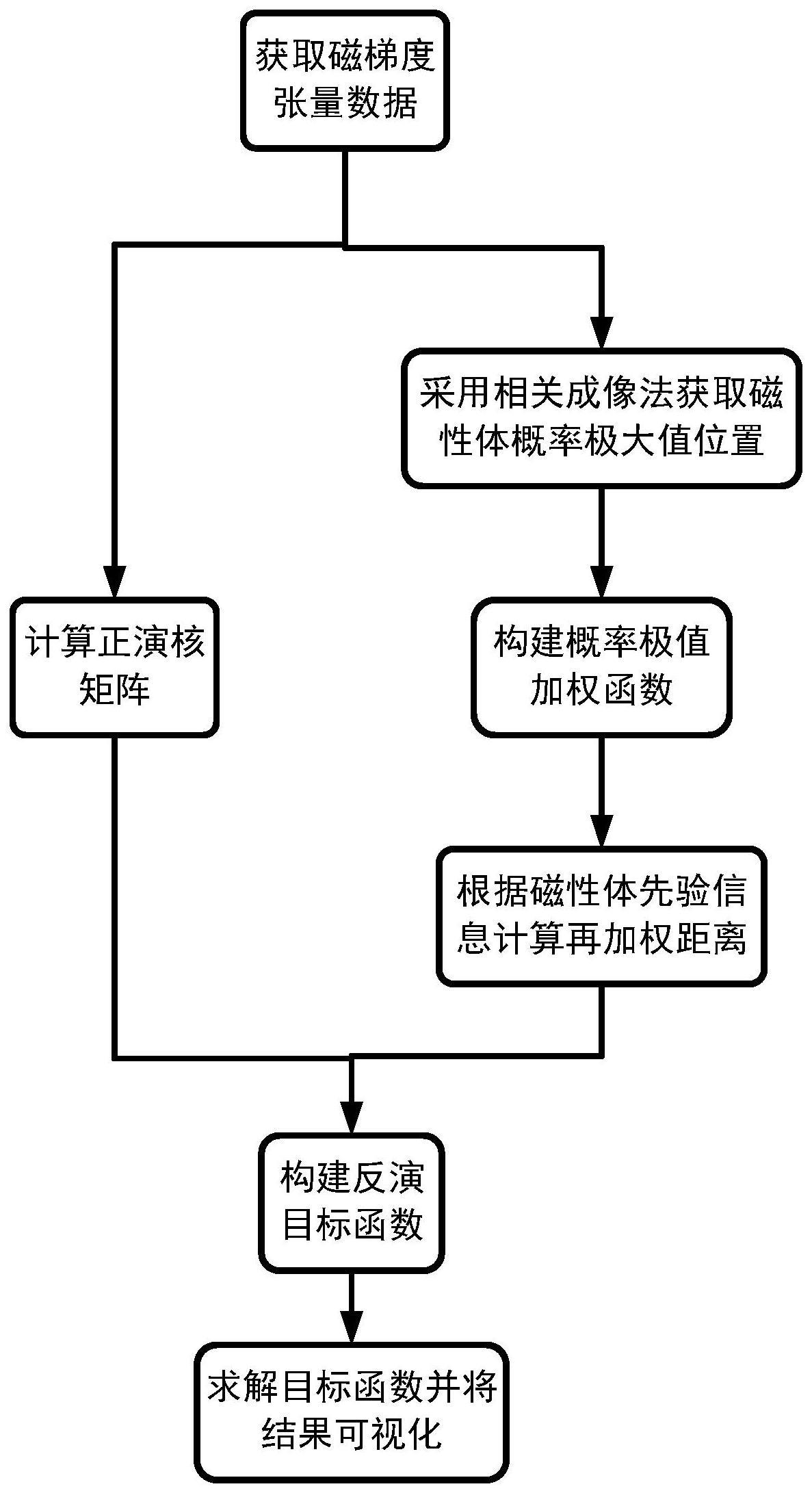
3、一种基于概率极值加权函数的多磁性目标三维重建方法,具体包括以下步骤:
4、s1:获取观测平面内的磁梯度张量数据,将反演空间划分为立方体网格单元,计算磁梯度张量正演的核矩阵;
5、s2:计算磁偶极子在每个网格单元上产生的理论磁梯度张量,并利用相关成像法计算其与测得磁梯度张量数据之间的归一化互相关系数cab,q;
6、s3:采用26邻域法计算相关系数的极大值所在的网格位置,由于相关系数表征了磁性体存在的概率,也就得到了磁性体存在概率的极大值位置;
7、s4:将概率极大值位置作为先验信息,构造概率极值加权函数。按照每个网格到概率极大值位置的距离进行加权,靠近概率极大值位置的网格被赋予更低的权重,从而将反演结果约束在概率极大值位置附近的空间内;
8、s5:如果磁性体在x,y,z三个方向上分布不均匀,计算各个网格到概率极大值位置的距离时要根据先验信息予以三个方向不同的权重,即计算再加权距离;
9、s6:将概率极值加权函数加入反演目标函数求解,再采用可视化方法得到三维重建结果;
10、进一步,步骤s1中,假设立方体的边分别为a,b,c,中心坐标为(x0,y0,z0),磁性立方体在任意观测点上的磁感应强度三分量表达式为:
11、
12、
13、
14、其中(x,y,z)为测量平面内观测点的坐标,μ0为真空中的磁导率,j为立方体的总磁化强度,l0,m0,n0分别为总磁化强度的方向余弦,(ξ,η,ζ)为立方体场源点的坐标,r=[(ξ-x)2+(η-y)2+(ζ-z)2]1/2,表示观测点与立方体内任意点间的距离;
15、对磁感应强度三分量表达式沿不同方向求导可得到对应的磁梯度张量分量表达式。
16、进一步,步骤s1中,由于位场的可叠加性,整个模型对任意观测点的磁梯度张量分量,等于组成该模型的网格单元在该点所产生磁梯度张量分量的线性叠加。
17、进一步,步骤s2中,归一化互相关系数cab,q的计算公式为:
18、
19、其中,bab(xi,yi,zi)为测区内任一点的实测磁梯度张量的某一分量,bab,q(xi,yi,zi)为地下磁偶极子q在测区内任一点产生的磁梯度张量的某一个分量,a,b=x,y,z,n为测区内观测点的总个数。
20、进一步,步骤s3中,互相关系数cab,q表示该q点存在偶极子的可能性。互相关系数cab,q表示该q点存在磁性体的可能性。cab,q介于-1到1之间,越接近1,存在磁性体的概率越大,因此相关系数的极大值位置反映了磁性体存在概率的极大值所在的位置。如果存在n个磁性目标,相应的可以得到n个这样概率极大值位置。
21、进一步,步骤s4中,利用磁性体概率极大值的位置坐标构造概率极值加权函数,其计算表达式为:
22、
23、其中,z0为观测平面相对于水平基准面的高度;zj为第j个立方体单元的中心理深;n表示磁性体存在概率的极大值的个数;r1j至rnj表示第j个网格单元中心到第1至第n个概率极大值位置的距离;r0是一个小的稳定常数,为了避免模型过于集中在概率极大值位置,r0的取值为一个网格单元的边长;
24、进一步,步骤s5中,第j个网格单元中心到概率极大值位置的再加权距离rij(i=1,2,…,n)的计算表达式为:
25、
26、其中(xi,yi,zi)为第i个预估的磁性体概率极大值位置的坐标,(xj,yj,zj)为第j个网格单元中心的坐标,ax,ay,az分别为三个方向上的先验比例权重,若无先验信息其默认值都为1。
27、进一步,步骤s6中,反演目标函数的表达式为:
28、
29、第一项为数据拟合函数,代表预测数据与实测数据的拟合程度。d代表观测数据,m为待求解的模型物性参数,g为由物性空间到数据空间的映射矩阵,也称为核矩阵;
30、第二项为模型目标函数,用来降低反演中的自由度以获得唯一解。其中,m0为参考模型,若无对应的先验信息时可设为0值向量;wm为模型加权矩阵,由不同类型的约束矩阵共同构成,如概率极值加权矩阵及粗糙度矩阵;β为正则化参数,作用是调节数据拟合目标函数和模型目标函数之间的权重。
31、理论上φ(m)的最小化,即在条件下的解m就是目标函数的最优解。
32、
33、对上式化简可得反演目标方程:
34、(gtg+βwmtwm)m=(gtd+βwmtwmm0)
35、进一步,步骤s6中,根据测量得到的磁梯度张量分量,利用共轭梯度法求解反演目标方程,以估计每个网格单元的磁化率。
36、进一步,步骤s6中,实现针对多个磁性目标的高精度三维重建的具体步骤包括:
37、将物性参数的最优解m根据网格单元的空间位置重排列成一个三维矩阵;
38、将最优解m的局部极值的40%作为分割阈值,磁化率小于该阈值的网格单元值被置0;
39、利用可视化技术对三维矩阵进行处理,实现对多个磁性目标的高精度三维重建。
40、本发明的有益效果在于:与现有技术相比,首次提出了利用相关成像法从磁梯度张量分量提取先验信息,并构造概率极值加权函数对反演目标方程进行约束,不仅可以消除背景场的影响,还能合理分配网格单元的权重,使成像结果向概率极大值位置收缩且轮廓更清晰,同时提升纵向及横向分辨力。相较于目前的三维反演方法,其成像结果的精确度更高,重建异常体模型的磁性参数以及三维轮廓都更加接近真实目标,反演效果有了明显的提升,从而实现多个磁性目标的高精度三维重建。
41、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!