点云数据处理方法、装置和计算机设备与流程
本技术涉及计算机,具体而言,涉及一种点云数据处理方法、装置和计算机设备。
背景技术:
1、随着科学技术的发展,人们经常会利用基于视觉的自动定位与地图构建(simultaneous localization and mapping,简称slam)技术来构建地图。
2、相关技术中,一般技术人员会控制相应的传感器按照便于定位和建图的路径进行运动,并在运动的过程中实时或间隔很短的时间采集目标区域的点云数据,以得到与目标区域对应的多帧点云数据。然后再根据采集到的多帧点云数据进行后端处理,以对多帧点云数据进行滤波和非线性优化。
3、然而,由于相关技术的方案在进行后端处理时,对每一帧点云数据的处理均会存在一定误差,那么在完成多帧点云数据的后端处理时,就会导致相关技术的方案出现积累误差较大的问题,因此,这种方案存在对点云数据的处理精度较差的问题。
技术实现思路
1、本技术的目的在于提供一种点云数据处理方法、装置和计算机设备,可以达到提高对点云数据的处理精度的效果。
2、本技术的实施例是这样实现的:
3、本技术实施例的第一方面,提供一种点云数据处理方法,所述方法包括:
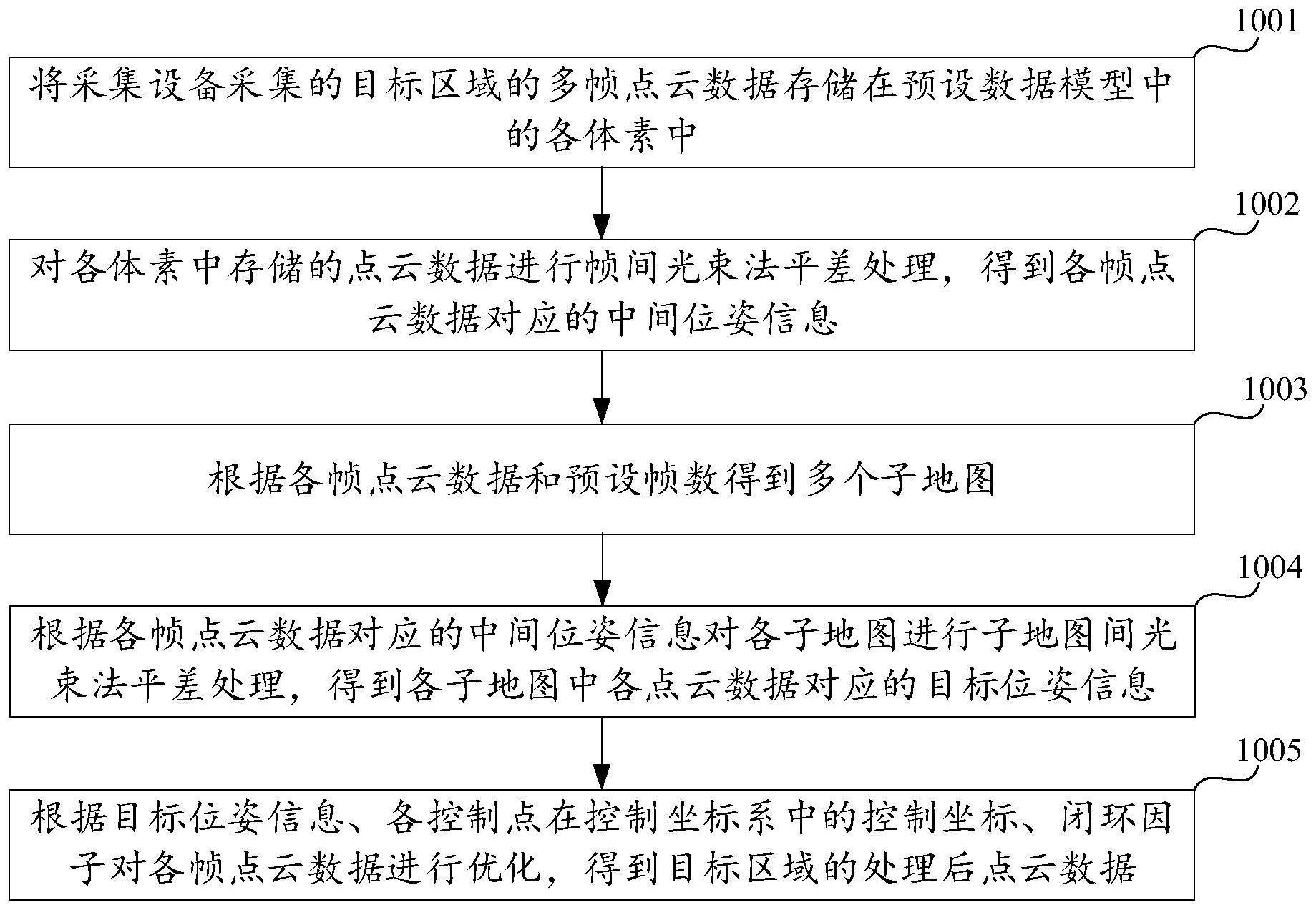
4、将采集设备采集的目标区域的多帧点云数据存储在预设数据模型中的各体素中;
5、对各所述体素中存储的点云数据进行帧间光束法平差处理,得到各帧点云数据对应的中间位姿信息;
6、根据各帧点云数据和预设帧数得到多个子地图,各子地图中包括所述预设帧数的点云数据;
7、根据各帧点云数据对应的中间位姿信息对各子地图进行子地图间光束法平差处理,得到各子地图中各点云数据对应的目标位姿信息;
8、根据所述目标位姿信息、各控制点在控制坐标系中的控制坐标、闭环因子对各帧点云数据进行优化,得到所述目标区域的处理后点云数据,其中,所述控制坐标系基于所述控制点的位置建立,所述采集设备采集点云数据时经过所述控制点。
9、可选地,所述对各所述体素中存储的点云数据进行帧间光束法平差处理,得到各帧点云数据对应的中间位姿信息,包括:
10、根据预设的滑动步长,从所述体素中确定多个点云数据集;
11、按照各所述点云数据集中点云数据的类型,基于对应的代价函数对各所述点云数据集中点云数据进行帧间光束法平差处理,得到各帧点云数据对应的位姿补偿信息;
12、根据所述位姿补偿信息、各帧点云数据的初始位姿信息确定各帧点云数据对应的所述中间位姿信息。
13、可选地,所述根据各帧点云数据和预设帧数得到多个子地图,包括:
14、将各帧点云数据按照时序排列,得到初始点云序列;
15、按照所述预设帧数,依次从所述初始点云序列中获取多个点云子序列,各所述点云子序列中包括所述预设帧数的点云数据;
16、分别将各点云子序列作为一个子地图。
17、可选地,所述根据各帧点云数据对应的中间位姿信息对各子地图进行子地图间光束法平差处理,得到各子地图中各点云数据对应的目标位姿信息,包括:
18、根据所述子地图中的参考点云数据对应的中间位姿信息建立局部坐标系,其中,所述参考点云数据为所述子地图中的任一点云数据;
19、将所述子地图的各待转点云数据转换到所述局部坐标系中,得到初步转换后子地图,所述待转点云数据为所述子地图中除所述参考点云数据之外的点云数据;
20、基于目标代价函数对所述初步转换后子地图进行子地图间光束法平差处理,得到所述初步转换后子地图对应的整体位姿信息;
21、根据所述整体位姿信息将所述初步转换后子地图中的各待转点云数据转换到初始坐标系,得到目标子地图,所述初始坐标系为所述待转点云数据的局部坐标系;
22、将所述目标子地图中各点云数据对应的位姿信息作为所述目标位姿信息。
23、可选地,所述根据各所述目标位姿信息、各控制点在所述控制坐标系中的控制坐标、闭环因子对各帧点云数据进行优化,得到所述目标区域的处理后点云数据,包括:
24、根据各所述控制点的控制坐标将各所述目标位姿信息转换到所述控制坐标系中,得到各目标位姿信息对应的转换后位姿信息;
25、通过各转换后位姿信息、各所述控制点的控制坐标、所述闭环因子对各帧点云数据进行优化,得到所述目标区域的处理后点云数据。
26、可选地,所述通过各转换后位姿信息、各所述控制点的控制坐标、所述闭环因子对各帧点云数据进行优化,得到所述目标区域的处理后点云数据,包括:
27、将各转换后位姿信息、各所述控制点的控制坐标、所述闭环因子输入预先构建的因子图优化模型中,得到所述目标区域的处理后点云数据。
28、可选地,所述根据各所述控制点的控制坐标将各所述目标位姿信息转换到所述控制坐标系中,得到各目标位姿信息对应的转换后位姿信息,包括:
29、将各控制点的局部坐标转换到全局坐标系中,得到各所述控制点的全局坐标;
30、根据各所述控制点的全局坐标和控制坐标,确定所述全局坐标系与所述控制坐标系之间的变换关系;
31、根据所述变换关系将各所述目标位姿信息转换到控制坐标系中,得到各目标位姿信息对应的转换后位姿信息。
32、本技术实施例的第二方面,提供了一种点云数据处理装置,所述点云数据处理装置包括:
33、存储模块,用于将采集设备采集的目标区域的多帧点云数据存储在预设数据模型中的各体素中;
34、第一光束法平差模块,用于对各所述体素中存储的点云数据进行帧间光束法平差处理,得到各帧点云数据对应的中间位姿信息;
35、处理模块,用于根据各帧点云数据和预设帧数得到多个子地图,各子地图中包括所述预设帧数的点云数据;
36、第二光束法平差模块,用于根据各帧点云数据对应的中间位姿信息对各子地图进行子地图间光束法平差处理,得到各子地图中各点云数据对应的目标位姿信息;
37、优化模块,用于根据所述目标位姿信息、各控制点在控制坐标系中的控制坐标、闭环因子对各帧点云数据进行优化,得到所述目标区域的处理后点云数据,其中,所述控制坐标系基于所述控制点的位置建立,所述采集设备采集点云数据时经过所述控制点。
38、本技术实施例的第三方面,提供了一种计算机设备,所述计算机设备包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述第一方面所述的点云数据处理方法。
39、本技术实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的点云数据处理方法。
40、本技术实施例的有益效果包括:
41、本技术实施例提供的一种点云数据处理方法,通过将采集设备采集的目标区域的多帧点云数据存储在预设数据模型中的各体素中,对各体素中存储的点云数据进行帧间光束法平差处理,得到各帧点云数据对应的中间位姿信息,根据各帧点云数据和预设帧数得到多个子地图,根据各帧点云数据对应的中间位姿信息对各子地图进行子地图间光束法平差处理,得到各子地图中各点云数据对应的目标位姿信息,根据该目标位姿信息、各控制点在控制坐标系中的控制坐标、闭环因子对各帧点云数据进行优化,得到该目标区域的处理后点云数据。
42、其中,由于通过光束法平差可以校正或优化因采集点云数据时产生的位姿误差,那么通过对各体素中存储的点云数据进行帧间光束法平差处理,就可以确保得到的中间位姿信息相比于直接采集到的点云数据的位姿信息更精确。
43、根据各帧点云数据对应的中间位姿信息对各子地图进行子地图间光束法平差处理,就可以降低或减少各子地图之间对多次进行帧间光束法平差处理产生的积累误差的传递,也就是说,这样,就可以使得两个相邻的子地图之间不会产生积累误差,进而可以提高各帧点云数据对应的目标位姿信息的准确度。
44、由于通过各控制点的控制坐标可以推算出其他地物或区域的坐标或位置,并且该目标位姿信息和该闭环因子是经过对各子地图进行子地图间光束法平差处理之后得到的,那么,通过该目标位姿信息、各控制点在控制坐标系中的控制坐标、闭环因子对各帧点云数据进行优化,就可以确保得到该目标区域的处理后点云数据不存在积累误差、精度较高。
45、如此,可以提高对点云数据的处理精度。
- 还没有人留言评论。精彩留言会获得点赞!