基于铁水搅拌过程的旋涡图像信息增强方法
本发明属于冶金,更具体地,涉及一种铁水的旋涡图像信息增强方法。
背景技术:
1、由于铁水kr搅拌脱硫反应过程无法测量含硫量数据,导致搅拌结束后,有时脱硫率不达标。这种情况就需要多次脱硫,又或者每次注入大量脱硫剂,以达到饱和脱硫,造成了浪费。之前有基于图像处理的铁水脱硫液面漩涡识别,计算涡径等漩涡信息技术的应用。测试得知10分钟的搅拌状态中,有3分50秒的清晰旋涡图像和4分钟的喷入脱硫剂完全模糊图像,原有系统是根据清晰旋涡图像识别得到旋涡半径,但有2分10秒左右的旋涡图像处于含有少量雾气阻挡的状态,利用这段半模糊图像进行处理以延长可检测出涡径信息的时间,成为一个研究方向。
2、现有技术中,虽然经过计算机处理得到旋涡半径之类的数据,但在kr搅拌脱硫的过程中,摄像头图像信息容易受到铁屑,光线变化,喷入脱硫剂产生的雾气等因素干扰,导致旋涡纹线损失,识别纹线信息出现困难,无法准确得知铁水罐搅拌过程中铁水的状态,提取的信息难以给控制系统带来太大帮助。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提出了一种基于铁水搅拌过程的旋涡图像信息增强方法,由此解决图像信息受到干扰,旋涡特征弱化的技术问题。
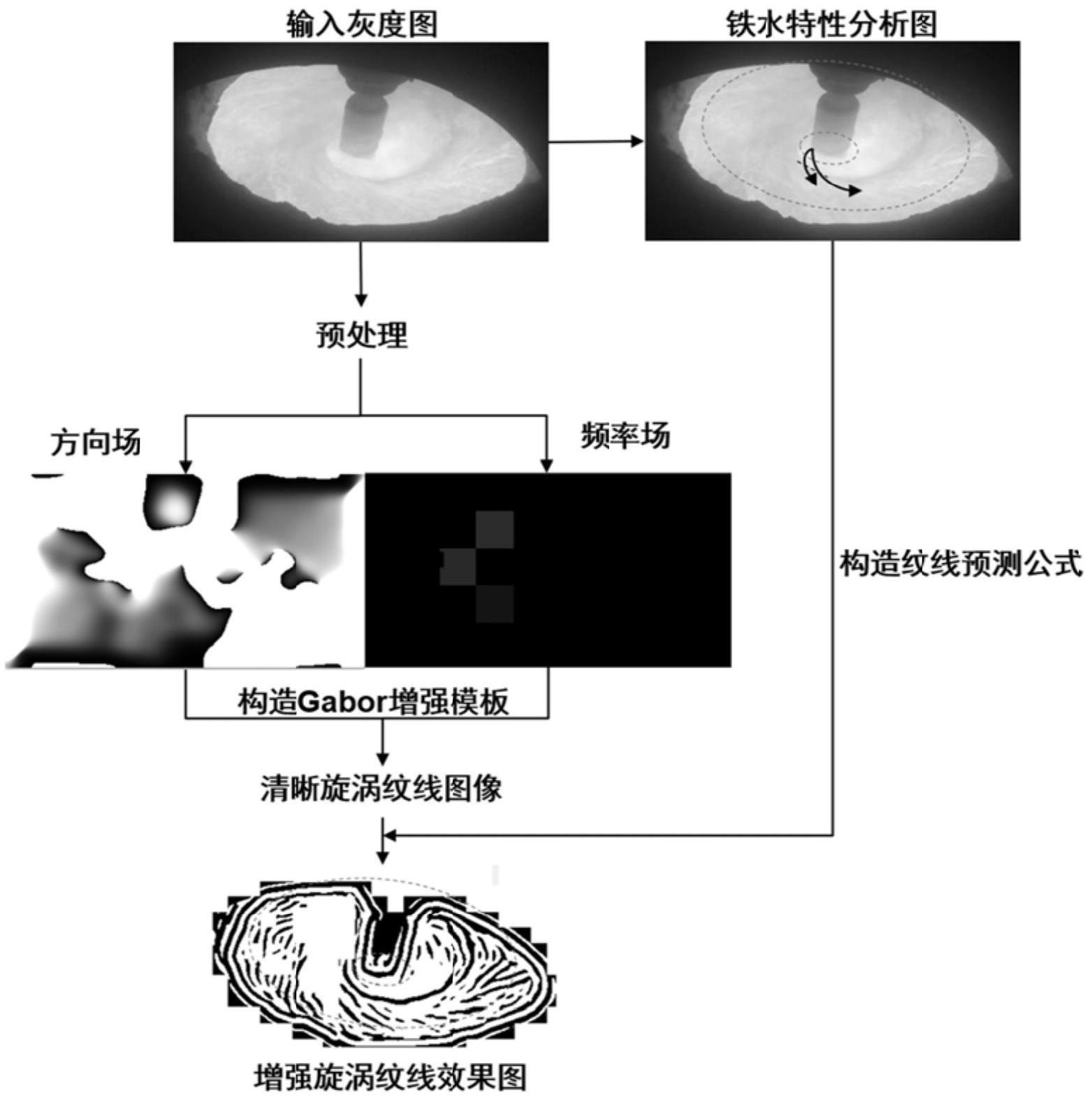
2、为实现上述目的,本发明提供了一种基于铁水搅拌过程的旋涡图像信息增强方法,包括:
3、(1)对图像中的铁水信息进行检测,通过迭代分割法,将铁水旋涡面从复杂的背景中检测出来得到分割后的铁水罐液面图像;
4、(2)将分割后的铁水罐液面图像采用gabor滤波图像识别方法得到增强旋涡纹线后的铁水旋涡图像;
5、(3)根据旋涡特性进行预测并增强铁水旋涡图像,对差异值处在限定范围内的纹线进行获取,得到目标铁水旋涡图像。
6、在一些可选的实施方案中,步骤(1)包括:
7、(1.1)将原始输入图像转化为灰度图像i,并将灰度图像i划分为若干互不重叠的分块;
8、(1.2)由选定区域的平均灰度值确定阈值t,根据阈值t将所有分块分为两组像素度值计算新阈值;
9、(1.3)若新阈值t1减旧阈值t的差值为零,则将新阈值t1作为二值图最佳阈值,否则继续迭代,直到满足新阈值t1减旧阈值t的差值为零;
10、(1.4)使用最佳阈值对灰度图像i进行二值化处理灰度图像i1,并将灰度图像i1的分割背景区域边界锐化;
11、(1.5)将锐化背景区域填充进灰度图像i1,以去除原图背景及干扰因素。
12、在一些可选的实施方案中,由得到新阈值t1,其中,g1是所有灰度值低于阈值t的分块图像的灰度相加总值,g2是所有灰度值高于阈值t的分块图像的灰度相加总值,g1是灰度值低于阈值t的分块图像的总个数,g2是灰度值高于阈值t的分块图像的总个数。
13、在一些可选的实施方案中,步骤(2)包括:
14、(2.1)将分割后的铁水罐液面图像进行归一化处理,转换成具有给定均值和方差的标准图像;
15、(2.2)通过gabor滤波器对标准图像进行处理得到灰度图像i2;
16、(2.3)将灰度图像i2划分为若干互不重叠的分块,提取每个分块的纹线方向和纹线频率;
17、(2.4)获得分块内的纹线曲率;
18、(2.5)构造gabor增强模板对灰度图像i2进行增强,得到增强旋涡纹线后的铁水旋涡图像。
19、在一些可选的实施方案中,步骤(2.1)包括:由将分割后的铁水罐液面图像进行归一化处理,其中,i(i,j)表示分割后的铁水罐液面图像,g(i,j)表示标准图像,m0和是预先设定的图像平均灰度和均方差,m和σ2为分割后的铁水罐液面图像的灰度均值和方差。
20、在一些可选的实施方案中,由计算每个分块的纹线方向,其中,每个像素点水平方向上的梯度值为和垂直方向上的梯度值为分块的中心点像素坐标为(i,j),θ(i,j)为纹线方向角,w表示纹线长径,(u,v)代表(i,j)在频域中的坐标。
21、在一些可选的实施方案中,每个分块的纹线频率提取方法为:
22、在所得纹线方向的基础上,沿纹线方向的垂直方向投影每一分块的所有像素的灰度值,投影形成一维正弦波,一维正弦波的极值点对应旋涡的纹线,假定t(i,j)作为一维正弦波两相邻峰值之间的平均像素数,则频率
23、在一些可选的实施方案中,由得到每个分块的纹线曲率,其中,φx(i,j,u,v)=|cos(2θ(i,j))-cos(2θ(u,v))|,φy(i,j,u,v)=|sin(2θ(i,j))-sin(2θ(u,v))|,其中,(i,j)为分块中心像素点坐标,(u,v)代表(i,j)在频域中的坐标,用c(i,j)表示分块内纹线曲率,θ表示方向角,n表示分块所在的局部区域大小,φ表示gabor滤波器的方向。
24、在一些可选的实施方案中,由构造gabor增强模板g,其中,xφ=xcosφ+ysinφ,yφ=-xcosφ+ysinφ,φ是gabor滤波器的方向,f是纹线的频率,[xφ,yφ]表示坐标轴[x,y]逆时针旋转角度φ,σx和σy分别是沿着x和y轴的高斯包络常量。
25、在一些可选的实施方案中,步骤(3)包括:
26、(3.1)收集进行增强后的铁水旋涡图像的纹线信息;
27、(3.2)将收集到的纹线信息进行筛选,剔除无用数据;
28、(3.3)对铁水旋涡图像的纹线信息进行预测,预测出间隔时间t后的图像纹线信息;
29、(3.4)根据间隔时间t后真实的图像纹线信息,计算得到真实信息与预测信息处理的旋涡图像,并将真实纹线与预测纹线区分记录。
30、在一些可选的实施方案中,步骤(3.3)包括:
31、由和计算预测旋涡的纹线动态,其中,s是各分块中心点像素坐标(i,j)移动距离,方向为θ(i,j),a[0]是中心点(i,j)瞬时加速度,w表示纹线长径,x表示预测纹线长径,r表示分块纹线中心点距铁水旋涡面中心点距离,v为流体速度;
32、通过各个分块中心点(i,j)计算得到的预测纹线各分块中心点,在单个纹线中预测坐标点方向θ(i,j)前后按曲率c(i,j)填充长径为x的像素点。
33、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
34、利用本发明的处理图像方法,降低复杂背景对检测目标的影响,将铁水旋涡面从复杂的背景中检测出来。通过构造gabor滤波器增强模板,加强灰度细节差异化,提高旋涡纹线的清晰度,并保持原有纹线结构信息。针对铁水旋涡特性对当前帧进行预测,得到间隔时间t后的旋涡纹线,达到避免间隔时间t后的该纹线可能模糊,能更好地提高旋涡图像的质量。
技术特征:
1.一种基于铁水搅拌过程的旋涡图像信息增强方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,步骤(1)包括:
3.根据权利要求2所述的方法,其特征在于,由得到新阈值t1,其中,g1是所有灰度值低于阈值t的分块图像的灰度相加总值,g2是所有灰度值高于阈值t的分块图像的灰度相加总值,g1是灰度值低于阈值t的分块图像的总个数,g2是灰度值高于阈值t的分块图像的总个数。
4.根据权利要求3所述的方法,其特征在于,步骤(2)包括:
5.根据权利要求4所述的方法,其特征在于,由计算每个分块的纹线方向,其中,
6.根据权利要求5所述的方法,其特征在于,每个分块的纹线频率提取方法为:
7.根据权利要求6所述的方法,其特征在于,由得到每个分块的纹线曲率,其中,φx(i,j,u,v)=|cos(2θ(i,j))-cos(2θ(u,v))|,φy(i,j,u,v)=|sin(2θ(i,j))-sin(2θ(u,v))|,其中,(i,j)为分块中心像素点坐标,(u,v)代表(i,j)在频域中的坐标,用c(i,j)表示分块内纹线曲率,θ表示方向角,n表示分块所在的局部区域大小,φ表示gabor滤波器的方向。
8.根据权利要求7所述的方法,其特征在于,由构造gabor增强模板g,其中,xφ=xcosφ+ysinφ,yφ=-xcosφ+ysinφ,φ是gabor滤波器的方向,f是纹线的频率,[xφ,yφ]表示坐标轴[x,y]逆时针旋转角度φ,σx和σy分别是沿着x和y轴的高斯包络常量。
9.根据权利要求8所述的方法,其特征在于,步骤(3)包括:
10.根据权利要求9所述的方法,其特征在于,步骤(3.3)包括:
技术总结
本发明公开了一种基于铁水搅拌过程的旋涡图像信息增强方法,属于冶金技术领域,包括:对图像中的铁水信息进行检测,通过迭代分割法,将铁水旋涡面从复杂的背景中检测出来得到分割后的铁水罐液面图像;将分割后的铁水罐液面图像采用gabor滤波图像识别方法得到增强旋涡纹线后的铁水旋涡图像;根据旋涡特性进行预测并增强铁水旋涡图像,对差异值处在限定范围内的纹线进行获取,得到目标铁水旋涡图像。利用本发明可以降低复杂背景对检测目标的影响,通过构造gabor滤波器增强模板,加强灰度细节差异化,针对铁水旋涡特性对当前帧进行预测,得到间隔时间t后的旋涡纹线,能更好地提高旋涡图像的质量以及强特征图像时间占比。
技术研发人员:但斌斌,骆志承,熊凌,容芷君,陈刚,陈小艳,都李平,方一飞,李欣,王祎浩
受保护的技术使用者:武汉科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!