一种无人机遥感监测调查林业有害生物的方法与流程
本发明属于林业大数据,具体是一种无人机遥感监测调查林业有害生物的方法。
背景技术:
1、目前,通过遥感监测林业有害生物(林业有害生物例如松毛虫、松材线虫病死树、阔叶树种食叶害虫等)的方法,是采集监测区域中的遥感图像,与监测区域中历史的遥感图像中像素点的光谱特征信息进行对比,进而判断该区域是否存在有害生物,但是由于植物在自然状态下的本身的变化(植被生长、干燥环境导致的叶片含水量变化或叶片覆盖范围变化)导致像素点的光谱特征信息发生的改变对有害生物的光谱特征信息识别产生强干扰,误识别率较高。
2、为解决该问题,公开号cn115131683a的中国专利于2022年9月30日公开了基于高分辨率遥感影像的林业信息识别方法,通过参照图像中像素点的光谱特征向量对像素点进行聚类,划分出了待检测区域的不同树种;通过计算像素点的灰度值序列中波长与灰度值的差异性,得到了该像素点的光谱曲线的形变量以及不同波段灰度值的偏移量,同时结合各个波段灰度值变化量的均匀性对损伤概率进行综合判断,以排除由于植被覆盖程度高而造成的曲线偏移量较高的情况,提高了对林业病虫害检测的准确性;还根据同种树种损伤概率的均匀性对损伤概率进行调整得到最终损伤概率进而判断病虫害发生的可能性,从而可以实现对同种树种不同季节的病虫害检测;但是,包括该技术在内的诸多现有技术中,如果是参照图像中已经存在了虫害区域,或者,在植物在自然状态下的本身的局部发生变化时,会产生强干扰,导致识别准确率会降低,并且该虫害区域甚至无法识别,并且由于地区的图像较大,识别速度慢,需要较大的运算成本。
技术实现思路
1、本发明的目的在于提出一种无人机遥感监测调查林业有害生物的方法,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、为了实现上述目的,本发明提出一种无人机遥感监测调查林业有害生物的方法,具体包括以下步骤:
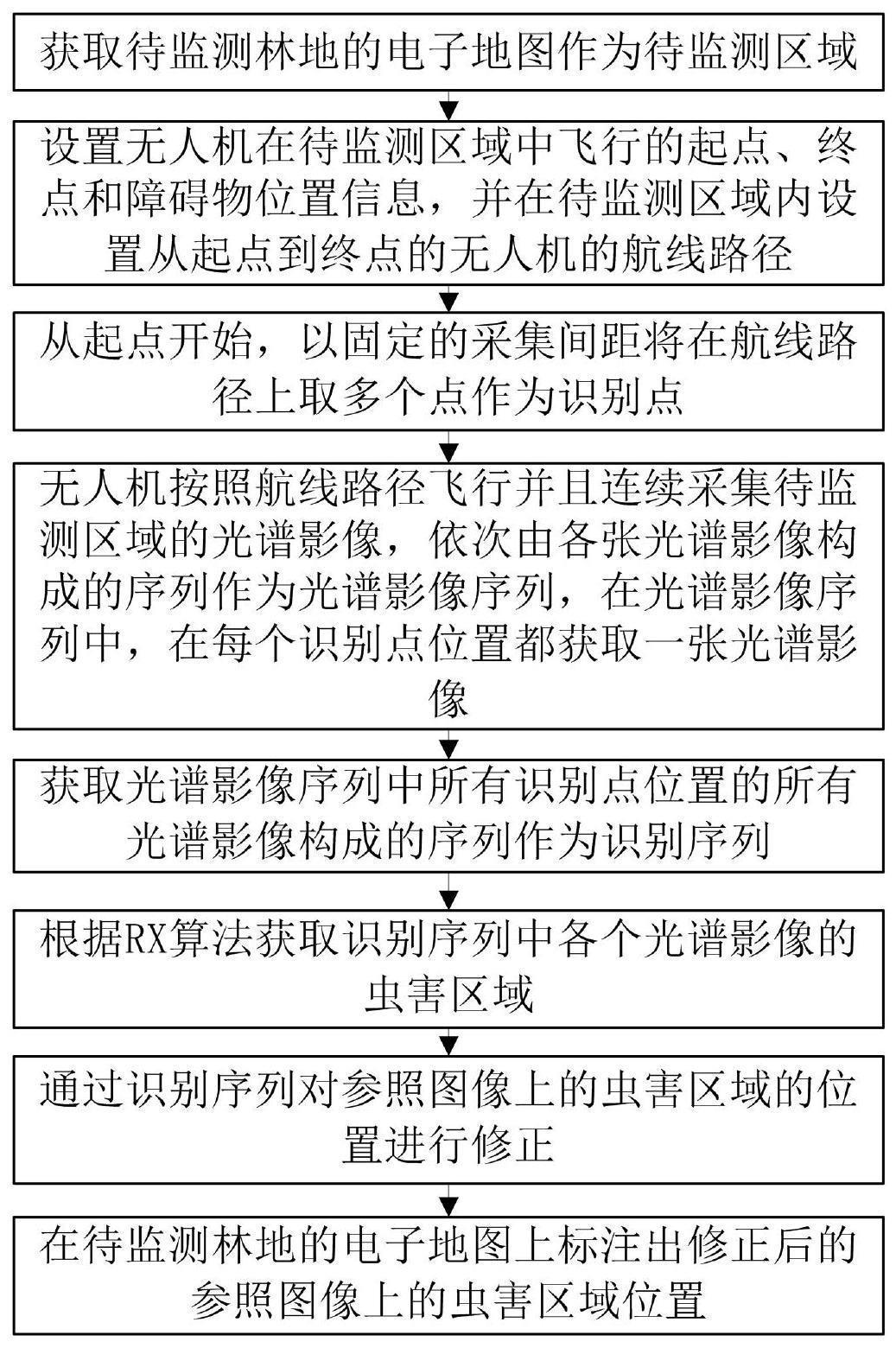
3、s1:获取待监测林地的电子地图作为待监测区域,待监测林地中包括松科植物、阔叶树种、桉属树种和/或藤蔓植物(松科植物:湿地松、马尾松、落叶松等;阔叶树种:杨树、榆树、樟树等;桉属树种:柠檬桉、广九等;藤蔓植物:薇甘菊、五爪金龙、金钟藤等);
4、s2:设置无人机在待监测区域中飞行的起点、终点和障碍物位置信息,并在待监测区域内设置从起点到终点的无人机的航线路径;
5、s3:从起点开始,以固定的采集间距将在航线路径上取多个点作为识别点;
6、s4:无人机按照航线路径飞行并且连续采集待监测区域的光谱影像,依次由各张光谱影像构成的序列作为光谱影像序列,在光谱影像序列中,在每个识别点位置都获取一张光谱影像;(由于无人机搭载的光谱仪的狭窄视场限制了每个光谱影像的地面覆盖范围,因此需要在飞行过程中连续的采集光谱仪的视场中的光谱影像形成光谱影像数据集,然后对光谱影像数据集中的各张光谱影像进行拼接得到整体的光谱影像,使得整体的光谱影像才能有效覆盖待监测区域);
7、s5:获取光谱影像序列中所有识别点位置的所有光谱影像构成的序列作为识别序列;
8、s6:根据rx算法获取识别序列中各个光谱影像的虫害区域;
9、s7:通过识别序列对参照图像上的虫害区域的位置进行修正;
10、s8:在待监测林地的电子地图上标注出修正后的参照图像上的虫害区域位置。
11、进一步地,在s1中,所述电子地图是通过卫星、无人机获取的一定坐标系统内具有确定的坐标和属性的地面要素和现象的离散数据。
12、进一步地,在s2中,在待监测区域内设置从起点到终点的无人机的航线路径包括:a*算法、基于k-最短路径算法、dijkstra算法、apf算法(apf:artificial potentialfield,人工势场算法)和saa算法(saa:simulated annealing algorithm,模拟退火算法)中的任意一种在待监测区域内从起点到终点的无人机的航线路径。
13、其中,航线路径是电子地图上的一组连续变化的位置坐标数据,无人机根据航线路径在电子地图上航线路径在待监测区域中航线路径对应位置坐标数据进行飞行移动。
14、其中,起点是无人机在待监测区域中起飞的位置(一般是当前位置),终点分别是无人机在待监测区域中飞行的终点位置,障碍物位置信息是待监测区域中障碍物位置,无人机需与障碍物位置保持预设的障碍物安全距离(2~5m)。
15、进一步地,设置无人机的初始参数:光谱成像系统视场角(15~25°)、航线间距(8~35m)、飞行高度(15~55m)、飞行速度(10~20m/s)、边界安全距离(2~5m)、障碍物安全距离(2~5m)。
16、优选地,设置光谱成像系统视场角为16°、飞行高度为30m、飞行速度13m/s。
17、进一步地,在s3中,固定的采集间距为8~35m。
18、进一步地,在s4中,连续采集待监测区域的光谱影像是通过无人机搭载的光谱仪在按照航线路径飞行的过程中对待监测区域进行光谱影像采集。
19、进一步地,在s6中,根据rx算法获取识别序列中各个光谱影像的虫害区域的方法为:将光谱影像中各个像素点的光谱反射率输入到rx算法(reed-xiaoli高光谱目标检测算法)中识别出光谱影像中待监测区域对应位置的虫害区域。
20、遥感监测病虫害是通过测量植物中叶绿素含量的变化进行判断,叶绿素的光谱反射率有其显著的特征,并且会随着波长的变化而变化。植物的叶绿素的光谱反射率在0.5~0.7μm处很低,在近红外波段,在0.7~0.9μm处明显增加,这是因为绿色植物可以吸收该波段的辐射能量。由于病虫害的植物体内的叶绿素会逐渐减少,吸收光的能力也随之减弱,可见光的反射率会明显提高,红外区域的反射率会显著降低,尤其是近红外波段。
21、优选地,根据rx算法获取识别序列中各个光谱影像的虫害区域的方法为:通过专利公开号为cn107347849a中公开的方法获取病虫害信息无人机作业区域中对应位置的虫害区域(rx异常探测方法)。
22、其中,虫害区域为病虫害像素点组成的区域,或者由病虫害像素点组成的边缘线的内部区域;其中,病虫害像素点是可见光反射率高于光谱影像中各个像素点的可见光反射率的平均值的光谱影像中对应的像素点,或者,病虫害像素点是近红外波段光谱反射率低于光谱影像中各个像素点的近红外波段光谱反射率的平均值的光谱影像中对应的像素点。
23、进一步地,在s7中,参照图像是在前一个时间间隔通过步骤s1~s6获取的各个光谱影像拼接成的待监测区域的整体光谱影像,其整体光谱影像在对应的待监测区域相应位置的上标注有通过步骤s6识别到的各个虫害区域位置。(时间间隔一般是7~30天),其中,光谱影像拼接包括步骤:几何校正、图像预处理、图像配准和图像融合。
24、优选地,在s7中,参照图像是通过机载的全谱段多模态成像光谱仪获取待监测区域的光谱影像或者通过高光谱遥感卫星获取的光谱影像,根据rx算法识别出所述光谱影像的虫害区域,并且将所述虫害区域标注在待监测区域上与光谱影像的虫害区域相应位置。
25、进一步地,所述无人机为搭载光谱仪的共轴双旋翼无人机、微型旋翼无人机或多旋翼无人机;优选地,所述光谱仪为gaiafield-mini光谱仪、specim afx系列高光谱相机或ath9020高光谱成像仪。
26、进一步地,在s7中,通过识别序列对参照图像上的虫害区域的位置进行修正的方法包括以下步骤:
27、记识别序列为rlocal,以rlocal中的各个光谱影像为识别分区,rlocal={rl(i)},i是识别分区的序号,i∈[1,n1],n1为识别分区的数量,rl(i)是序列rlocal中第i个识别分区;
28、在i的取值范围内,以rl(i)对应的识别点为p1(i),计算rl(i)内部的各个虫害区域的几何重心点到p1(i)之间的欧氏距离,则rl(i)内部的所有所述的欧氏距离的均值为rlmean(i);选择rl(i)中的各个虫害区域的几何重心点与p1(i)的距离值最大的所述几何重心点在参照图像上对应位置的点记为远心点p2(i),选择rl(i)中的各个虫害区域的几何重心点与p1(i)的距离值最小的所述几何重心点在参照图像上对应位置的点记为近心点p3(i);
29、从参照图像上筛选出所有的虫害区域的几何重心点到p2(i)的距离小于rlmean(i)的虫害区域构成的集合记为rlsub(i);和/或,从参照图像上筛选出所有的虫害区域的几何重心点到p2(i)的距离小于rlmean(i)并且虫害区域中所有像素点的近红外波段光谱反射率的均值低于远心点p2(i)在rl(i)中对应的虫害区域中所有像素点的近红外波段光谱反射率的均值的虫害区域构成的集合记为rlsub(i);
30、以n2为rlsub(i)中的元素的数量,rlsub(i,j)是rlsub(i)中第j个虫害区域的几何重心点,j是rlsub(i)中元素的序号,j∈[1,n2];
31、如果n2=0,则将rl(i)记为无需修正的识别分区;如果n2>0时,在i的取值范围内对参照图像上的rl(i)对应位置内部的虫害区域的位置进行修正。
32、以上方案能识别出虫害区域和无人机航线上识别点的偏移位置,能够识别虫害区域准确的相对位置,保证虫害位置坐标的相对精度。
33、进一步地,在i的取值范围内对参照图像上的rl(i)对应位置内部的虫害区域的位置进行修正的方法包括以下步骤:
34、在j的取值范围内,计算远心点p2(i)与rlsub(i)中各个rlsub(i,j)之间的距离的均值记为远心距离ad;计算近心点p3(i)与rlsub(i)中各个rlsub(i,j)之间的距离的均值记为近心距离bd;记远心点p2(i)与各个rlsub(i,j)之间的距离最短的rlsub(i,j)在参照图像上对应位置的点为pf;记近心点p3(i)与各个rlsub(i,j)之间的距离最短的rlsub(i,j)在参照图像上对应位置的点为pn;
35、当ad≥bd时,以远心点p2(i)到pf的方向为调整方向,将参照图像上的各个虫害区域中几何重心点距离pf最近的虫害区域朝调整方向移动远心距离ad,
36、当ad<bd时,以近心点p3(i)到pn的方向为调整方向,将参照图像上的各个虫害区域中几何重心点距离pn最近的虫害区域朝调整方向移动近心距离bd。
37、优选地,当ad≥bd时,在参照图像上以p2(i)为圆心、以p2(i)到pf的连线为半径的范围为修正范围a,如果修正范围a在rl(i)上的对应区域内存在除了p2(i)对应的虫害区域之外的虫害区域,则将rl(i)上这些虫害区域复制到参照图像上的这些虫害区域的对应位置。
38、优选地,当ad<bd时,在参照图像上以p3(i)为圆心、以p3(i)到pn的连线为半径的范围为修正范围b,如果修正范围b在rl(i)上的对应区域内存在除了p3(i)对应的虫害区域之外的虫害区域,则将rl(i)上这些虫害区域复制到参照图像上的这些虫害区域的对应位置。
39、优选地,当ad≥bd时,在参照图像上以p2(i)为圆心、以p2(i)到pf的连线为半径的范围为修正范围a,如果修正范围a在rl(i)上的对应区域内不存在除了p2(i)对应的虫害区域之外的虫害区域,则将参照图像上修正范围a内的虫害区域删除。
40、优选地,当ad<bd时,在参照图像上以p3(i)为圆心、以p3(i)到pn的连线为半径的范围为修正范围b,如果修正范围b在rl(i)上的对应区域内不存在除了p3(i)对应的虫害区域之外的虫害区域,则将参照图像上修正范围b内的虫害区域删除。
41、以上技术方案的远心距离ad和近心距离bd均是以识别点为基准的距虫害区域几何重心点的偏移距离,通过对偏移距离的修正,能够去除参照图像中已经存在了虫害区域在经过植物在自然状态下的本身的局部发生变化时对虫害区域的准确识别产生的强干扰,提高了虫害区域的识别准确率,并且由于是根据当前局部的图像进行处理的,无需识别整体图像从而大幅的提高了识别速度,减少了运算成本。
42、为减少部分非虫害区域的经过植物在自然状态下的本身的局部发生变化时产生的影响,进一步的提高虫害区域的定位和修正准确性,所以本发明提出了以下优选地方案:
43、优选地,在i的取值范围内对参照图像上的虫害区域的位置进行修正的方法包括以下步骤:
44、计算rl(i)的虫害位置偏离指数dev(i),具体方法为:
45、
46、其中,偏离程度函数
47、|p2(i)-rlsub(i,j)|为远心点p2(i)到rlsub(i,j)之间的距离;
48、|p3(i)-rlsub(i,j)|为近心点p3(i)到rlsub(i,j)之间的距离;
49、在i的取值范围内计算出所有rl(i)的病虫害位置偏离指数dev(i),计算所有dev(i)的平均值为meandev,标记所有dev(i)≥meandev的识别分区rl(i)为待优化识别分区;
50、当rl(i)为待优化识别分区时,在j的取值范围内,计算远心点p2(i)与rlsub(i)中各个rlsub(i,j)之间的距离的均值记为远心距离ad;计算近心点p3(i)与rlsub(i)中各个rlsub(i,j)之间的距离的均值记为近心距离bd;记远心点p2(i)与各个rlsub(i,j)之间的距离最短的rlsub(i,j)在参照图像上对应位置的点为pf;记近心点p3(i)与各个rlsub(i,j)之间的距离最短的rlsub(i,j)在参照图像上对应位置的点为pn;
51、当ad≥bd时,以远心点p2(i)到pf的方向为调整方向,将参照图像上的各个虫害区域中几何重心点距离pf最近的虫害区域朝调整方向移动远心距离ad;
52、当ad<bd时,以近心点p3(i)到pn的方向为调整方向,将参照图像上的各个虫害区域中几何重心点距离pn最近的虫害区域朝调整方向移动近心距离bd。
53、当ad≥bd时,以远心点p2(i)到pf的方向为调整方向,将参照图像上的各个虫害区域中几何重心点距离pf最近的虫害区域朝调整方向移动远心距离ad,
54、当ad<bd时,以近心点p3(i)到pn的方向为调整方向,将参照图像上的各个虫害区域中几何重心点距离pn最近的虫害区域朝调整方向移动近心距离bd。
55、优选地,当ad≥bd时,在参照图像上以p2(i)为圆心、以p2(i)到pf的连线为半径的范围为修正范围a,如果修正范围a在rl(i)上的对应区域内存在除了p2(i)对应的虫害区域之外的虫害区域,则将rl(i)上这些虫害区域复制到参照图像上的这些虫害区域的对应位置。
56、优选地,当ad<bd时,在参照图像上以p3(i)为圆心、以p3(i)到pn的连线为半径的范围为修正范围b,如果修正范围b在rl(i)上的对应区域内存在除了p3(i)对应的虫害区域之外的虫害区域,则将rl(i)上这些虫害区域复制到参照图像上的这些虫害区域的对应位置。
57、优选地,当ad≥bd时,在参照图像上以p2(i)为圆心、以p2(i)到pf的连线为半径的范围为修正范围a,如果修正范围a在rl(i)上的对应区域内不存在除了p2(i)对应的虫害区域之外的虫害区域,则将参照图像上修正范围a内的虫害区域删除。
58、优选地,当ad<bd时,在参照图像上以p3(i)为圆心、以p3(i)到pn的连线为半径的范围为修正范围b,如果修正范围b在rl(i)上的对应区域内不存在除了p3(i)对应的虫害区域之外的虫害区域,则将参照图像上修正范围b内的虫害区域删除。
59、根据该优选的方案,其中的虫害位置偏离指数是判断出病虫害位置的远心点和近心点与识别点之间的偏离程度,从而均衡的判断出非虫害区域和虫害区域的位置之间的差异性,并且能够智能根据该差异性对参照图像进行的虫害区域增删,并且准确的调整虫害区域的位置,减少了部分非虫害区域的经过植物在自然状态下的本身的局部发生变化时对虫害区域产生的影响。
60、本发明还提供了一种无人机遥感监测调查林业有害生物的系统,所述一种无人机遥感监测调查林业有害生物的系统包括:处理器、存储器及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种无人机遥感监测调查林业有害生物的方法中的步骤,所述一种无人机遥感监测调查林业有害生物的系统可以运行于桌上型计算机、笔记本电脑、掌上电脑及云端数据中心等计算设备中,可运行的系统可包括,但不仅限于,处理器、存储器、服务器集群,所述处理器执行所述计算机程序运行在以下系统的单元中:
61、地图获取单元,用于获取待监测林地的电子地图作为待监测区域;
62、航线设置单元,用于设置无人机在待监测区域中飞行的起点、终点和障碍物位置信息,并在待监测区域内设置从起点到终点的无人机的航线路径;
63、识别划分单元,用于从起点开始,以固定的采集间距将在航线路径上取多个点作为识别点;
64、光谱采集单元,用于无人机按照航线路径飞行并且连续采集待监测区域的光谱影像,依次由各张光谱影像构成的序列作为光谱影像序列,在光谱影像序列中,在每个识别点位置都获取一张光谱影像;
65、识别提取单元,用于获取光谱影像序列中所有识别点位置的所有光谱影像构成的序列作为识别序列;
66、虫害识别单元,用于根据rx算法获取识别序列中各个光谱影像的虫害区域;
67、虫害修正单元,用于通过识别序列对参照图像上的虫害区域的位置进行修正;
68、地图标注单元,用于在待监测林地的电子地图上标注出修正后的参照图像上的虫害区域位置。
69、本发明的有益效果为:本发明通过提供一种无人机遥感监测调查林业有害生物的方法,能识别出虫害区域和无人机航线上识别点的偏移位置,能够识别虫害区域准确的相对位置,保证虫害位置坐标的相对精度,通过对偏移距离的修正,能够去除参照图像中已经存在了虫害区域在经过植物在自然状态下的本身的局部发生变化时对虫害区域的准确识别产生的强干扰,提高了虫害区域的识别准确率,并且由于是根据当前局部的图像进行处理的,无需识别整体图像从而大幅的提高了识别速度,减少了运算成本。均衡的判断出非虫害区域和虫害区域的位置之间的差异性,并且能够智能根据该差异性对参照图像进行的虫害区域增删,并且准确的调整虫害区域的位置,减少了部分非虫害区域的经过植物在自然状态下的本身的局部发生变化时对虫害区域产生的影响。
- 还没有人留言评论。精彩留言会获得点赞!