一种大型复合材料构件三维测量点云质量优化方法
1.本发明涉及三维数据处理技术领域,尤其涉及一种大型复合材料构件三维测量点云质量优化方法。
背景技术:
2.三维精密测量技术可实现复杂零件的精度检测、关键特征提取,为后续制造、装配工艺优化提供重要基础数据,是保证复杂零件成形、装配精度的关键技术。
3.但实际应用时尚存在以下问题:工业现场工况复杂,测量环境微小震动、工装遮挡、测量对象自身遮挡往往造成测量数据存在局部噪声、背景噪声和局部数据残缺;大型复合材料构件结构复杂,变厚度多曲率结构表面分布横纵加强筋,其外形三维数据需要多次测量拼接完成,误差累计严重,导致测量数据中存在分层噪声;再加上复合材料材质特殊,表面反射率变化范围大,使得大型复合材料构件表面局部区域测量数据严重失真,表面存在噪声和特征扭曲等,极大影响了数据自动处理的精度与稳定性,后续装配协调分析的有效性难以保证。因此,对大型复合材料构件三维测量点云数据进行质量优化是后续高精度协调的必要条件。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种大型复合材料构件三维测量点云质量优化方法,解决了三维测量系统中实测的点云数据中存在大量噪声的技术问题,本发明可有效优化复杂实际装配现场复合材料零部件三维实测点云数据质量,抑制点云曲面噪声,恢复尖锐特征结构。
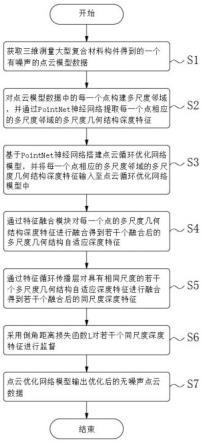
5.为解决上述技术问题,本发明提供了如下技术方案:一种大型复合材料构件三维测量点云质量优化方法,该方法包括以下步骤:s1、获取三维测量大型复合材料构件得到的一个有噪声的点云模型数据;s2、对点云模型数据中的每一个点构建多尺度邻域,并通过pointnet神经网络提取每一个点相应的多尺度邻域的多尺度几何结构深度特征;s3、基于pointnet神经网络搭建点云循环优化网络模型,并将每一个点相应的多尺度邻域的多尺度几何结构深度特征输入至点云循环优化网络模型中;s4、通过特征融合模块对每一个点的多尺度几何结构深度特征进行融合得到若干个融合后的多尺度几何结构自适应深度特征;s5、通过特征循环传播层对具有相同尺度的若干个多尺度几何结构自适应深度特征进行融合得到若干个融合后的同尺度深度特征;s6、采用倒角距离损失函数l对若干个同尺度深度特征进行监督;s7、点云循环优化网络模型输出优化后的无噪声点云数据。
6.进一步地,在步骤s2中,对点云模型数据中的每一个点构建多尺度邻域,并通过pointnet神经网络提取每一个点相应的多尺度邻域的多尺度几何结构深度特征,具体过程
包括以下步骤:s21、将有噪声的点云模型数据归一化至以原点为中心的单位球体内,然后为每一个点通过球邻域建立多尺度邻域;s22、在多尺度邻域中根据采样点数量以搜索半径进行搜索得到每一个点的每个尺度局部邻域;当多尺度邻域内点数小于采样点数量时,缺少点皆补充为原点;当多尺度邻域中点数多于采样点数量时,则进行随机采样;s23、将每个点的每个尺度局部邻域视为一个点云数据,然后通过pointnet神经网络提取每个尺度局部邻域的全局特征作为当前点的多尺度几何结构深度特征。
7.进一步地,采样点数量分别为 32、48、64和128,对应的搜索半径分别为0.2、0.4、0.6和0.8。
8.进一步地,在步骤s3中,点云循环优化网络模型包括以pointnet神经网络为基础,分别嵌入一个双向循环rnn的特征融合模块和一个带有注意力编码器rnn的特征循环传播层;特征融合模块包括两个lstm单元,lstm单元包括遗忘门、更新门和输出门。
9.进一步地,在步骤s4中,通过特征融合模块对每一个点的多尺度几何结构深度特征进行融合得到若干个融合后的多尺度几何结构自适应深度特征,具体过程包括以下步骤:s41、将若干个多尺度邻域按照采样点数量分别建立两个输入向量,采样点数量分别为32、48、64、128和128、64、48、32;s42、将两种输入向量分别输入两个lstm单元中向前推算,沿着小尺度到大尺度的输入顺序正向计算一遍,得到并保存每个顺序向前隐含层的输出,沿着大尺度到小尺度的输入顺序反向计算一遍,得到并保存每个顺序向后隐含层的输出;s43、将正向和反向的输出值按顺序排列,将排列结果组成特征向量得到最终输出,即得到融合后的多尺度几何结构自适应深度特征。
10.进一步地,在步骤s5中,通过特征循环传播层对具有相同尺度的若干个多尺度几何结构自适应深度特征进行融合得到若干个融合后的同尺度深度特征,具体过程包括以下步骤:s51、对融合后的多尺度几何结构自适应深度特征生成的优化点云进行多尺度邻域采样;s52、通过一个带有注意力编码器rnn的特征循环传播层分别对每个尺度特征进行相应的同尺度的多尺度几何结构自适应深度特征进行融合;s53、对每个点相应的多尺度邻域的多尺度几何结构深度特征,采用特征融合模块,将每个点的多尺度几何结构深度特征进行融合;s54、多次重复步骤s51-步骤s53,得到若干个融合后的同尺度深度特征。
11.进一步地,在步骤s6中,采用倒角距离损失函数l对若干个同尺度深度特征进行监督,具体过程包括以下步骤:s61、将每个点特征感知权重引入到倒角距离损失函数中建立特征感知的倒角
距离损失函数;s62、建立分布均匀项的损失函数;s63、根据特征感知的倒角距离损失函数和分布均匀项的损失函数建立总体损失函数的倒角距离损失函数l;s64、通过点云循环优化网络模型的两个全连接层根据倒角距离损失函数l回归残差坐标得到残差坐标,然后将输入点的原始三维坐标与残差坐标累加输出去噪得到优化后的点坐标。
12.借由上述技术方案,本发明提供了一种大型复合材料构件三维测量点云质量优化方法,至少具备以下有益效果:1、本发明适用于三维测量系统中实测的点云数据噪声去除和几何特征恢复,可有效优化复杂实际装配现场复合材料零部件三维实测点云数据质量,抑制点云曲面噪声,恢复尖锐特征结构。
13.2、本发明可以很好去除大型复合材料构件原始三维测量点云数据中的误差,并恢复不规则轮廓边界特征,为后续大型复合材料构件的三维建模、装配特征提取以及对缝协调分析等处理提供高质量数据基础。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:图1为本发明点云质量优化方法的流程图;图2为本发明点云循环优化网络模型的网络结构图;图3为本发明特征融合模块的网络结构图;图4为本发明特征循环传播层的网络结构图。
具体实施方式
[0015] 为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图 和具体实施方式对本发明作进一步详细的说明。借此对本技术如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
[0016]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0017]
请参照图1-图4,示出了本实施例的一种具体实施方式,本实施例所提供的方法可有效优化复杂实际装配现场复合材料零部件三维实测点云数据质量,抑制点云曲面噪声,恢复尖锐特征结构。
[0018]
请参照图1,本实施例提出了一种大型复合材料构件三维测量点云质量优化方法,该方法包括以下步骤:
s1、获取三维测量大型复合材料构件得到的一个有噪声的点云模型数据,具体的可通过三维激光扫描仪对大型复合材料构件进行扫描获取其相应的点云模型数据,也可以通过其他设备进行采集。
[0019]
s2、对点云模型数据中的每一个点构建多尺度邻域,并通过pointnet神经网络提取每一个点相应的多尺度邻域的多尺度几何结构深度特征。
[0020]
在步骤s2中,具体过程包括以下步骤:s21、将有噪声的点云模型数据归一化至以原点为中心的单位球体内,然后为每一个点通过球邻域建立多尺度邻域;具体的通过下述公式将点云模型数据归一化至以原点为中心的单位球体内:上式中,表示第i个点云模型数据,表示第i个点云模型数据的最小值,表示第i个点云模型数据的最大值。
[0021]
s22、在多尺度邻域中根据采样点数量以搜索半径进行搜索得到每一个点的每个尺度局部邻域;当多尺度邻域内点数小于采样点数量时,缺少点皆补充为原点;当多尺度邻域中点数多于采样点数量时,则进行随机采样;示例性的在该步骤中,在多尺度邻域中设置k=4种尺度,对于这四种尺度邻域,采样点数量分别为 32、48、64和128,对应的搜索半径分别为0.2、0.4、0.6和0.8。当多尺度邻域内点数小于设定的采样点数量时,缺少点皆补充为原点,当多尺度邻域中点数多于设定的采样点数量时,则进行随机采样。
[0022]
s23、将每个点的每个尺度局部邻域视为一个点云数据,然后通过pointnet神经网络提取每个尺度局部邻域的全局特征作为当前点的多尺度几何结构深度特征。
[0023]
具体的,通过pointnet神经网络的多层感知器和最大池化操作来提取该邻域的全局特征作为当前点的深度特征向量,即为当前点的多尺度几何结构深度特征。
[0024]
s3、基于pointnet神经网络搭建点云循环优化网络模型,并将每一个点相应的多尺度邻域的多尺度几何结构深度特征输入至点云循环优化网络模型中。
[0025]
请参照图2,点云循环优化网络模型包括以pointnet神经网络为基础,分别嵌入一个双向循环rnn的特征融合模块和一个带有注意力编码器rnn的特征循环传播层;特征融合模块包括两个lstm单元,lstm单元包括遗忘门、更新门和输出门;遗忘门的表达式为:上式中,为sigmoid激活函数,表示遗忘门权重,表示t-1时刻输出信息,表示t时刻输入信息,表示遗忘门激活值,其中,
更新门的表达式为:更新门的表达式为:上式中,为sigmoid激活函数,表示输入门权重,表示t-1时刻输出信息,表示t时刻输入信息,表示输入门激活值,为遗忘门,为输入门,为t时刻单元状态,为t时刻单元中间状态,为t-1时刻单元状态。
[0026]
输出门的表达式为:上式中,为输出门,为sigmoid激活函数,表示输出门权重,表示t-1时刻输出信息,表示t时刻输入信息,表示输入门激活值,为t时刻单元状态。
[0027]
s4、通过特征融合模块对每一个点的多尺度几何结构深度特征进行融合得到若干个融合后的多尺度几何结构自适应深度特征,即若干个点形成一个特征向量。
[0028]
请参照图3,在步骤s4中,具体过程包括以下步骤:s41、将若干个多尺度邻域按照采样点数量分别建立两个输入向量,采样点数量分别为32、48、64、128和128、64、48、32;具体的,根据采样点数量分别按照从小尺度到大尺度的输入顺序和从大尺度到小尺度的输入顺序建立两个输入向量,即32、48、64、128和128、64、48、32。
[0029]
s42、将两种输入向量分别输入两个lstm单元中向前推算,沿着小尺度到大尺度的输入顺序正向计算一遍,得到并保存每个顺序向前隐含层的输出,沿着大尺度到小尺度的输入顺序反向计算一遍,得到并保存每个顺序向后隐含层的输出;s43、将正向和反向的输出值按顺序排列,将排列结果组成特征向量得到最终输出,即得到融合后的多尺度几何结构自适应深度特征。
[0030]
该步骤所提供的方法设计了一个双向循环rnn的特征融合模块,将提取的四个特征分别从顺序和逆序依次输入两个lstm单元,最终输出由连接两个lstm单元输出合成得到,以此将每个点的多尺度几何结构深度特征进行融合,克服现有方法对局部邻域的敏感性,为循环去噪生成自适应特征。
[0031]
s5、通过特征循环传播层对具有相同尺度的若干个多尺度几何结构自适应深度特征进行融合得到若干个融合后的同尺度深度特征;请参照图4,在步骤s5中,具体过程包括以下步骤:s51、对融合后的多尺度几何结构自适应深度特征生成的优化点云进行多尺度邻
域采样,采样过程与步骤s2相同,为避免重复描述,在此不再详细赘述;s52、通过一个带有注意力编码器rnn的特征循环传播层分别对每个尺度特征进行相应的同尺度的多尺度几何结构自适应深度特征进行融合;s53、对每个点相应的多尺度邻域的多尺度几何结构深度特征,采用特征融合模块,将每个点的多尺度几何结构深度特征进行融合,具体融合过程与步骤s4相同,为避免重复描述,在此不再详细赘述;s54、多次重复步骤s51-步骤s53,得到若干个融合后的同尺度深度特征,使点云循环优化网络模型可以为具有不同噪声和细节特征的相同邻域学习更鲁棒的特征。
[0032]
其中,特征循环传播层的隐状态计算公式为:特征循环传播层的输出层计算公式为:上式中,是t时刻的输入,u是输入层到隐藏层的权重矩阵,是t时刻的隐藏层的值,w是上一时刻的隐藏层的值传入到下一时刻的隐藏层时的权重矩阵,v是隐藏层到输出层的权重矩阵,是t时刻rnn网络的输出。
[0033]
注意力输出向量序列为:注意力权重计算方法为:上式中,为encoder j处的隐状态,为decoder i处的隐状态,表示表示第i个输出在第j个输入上分配的注意力权值,表示encoder i处隐状态和decoder j-1 处的隐状态之间的匹配。
[0034]
通过在pointnet神经网络中嵌入了一个特征循环传播层来充分利用循环过程中的多尺度几何结构自适应深度特征,避免了几何特征被过度平滑,实现自适应保留和恢复几何特征。
[0035]
s6、采用倒角距离损失函数l对若干个同尺度深度特征进行监督;在步骤s6中,具体过程包括以下步骤:s61、将每个点特征感知权重引入到倒角距离损失函数中建立特征感知的倒角距离损失函数;的定义公式为:
上式中,是无噪声点云中的第j个点,是第i循环阶段的第j个去噪后的点。特征感知权重定义为无噪声点的平滑度。
[0036]
s62、建立分布均匀项的损失函数;的定义公式为:上式中,是点的k邻近点索引号集合,是高斯权重函数,是是惩罚过近点的递减函数。
[0037]
s63、根据特征感知的倒角距离损失函数和分布均匀项的损失函数建立总体损失函数的倒角距离损失函数l;倒角距离损失函数l的计算公式为:上式中,表示分布均匀项的损失函数的权重。
[0038]
s64、通过点云循环优化网络模型的两个全连接层根据倒角距离损失函数l回归残差坐标得到残差坐标,然后将输入点的原始三维坐标与残差坐标累加输出去噪得到优化后的点坐标。
[0039]
s7、点云循环优化网络模型输出优化后的无噪声点云数据。
[0040]
本实施例所提供的方法可以很好去除大型复合材料构件原始三维测量点云数据中的误差,并恢复不规则轮廓边界特征,为后续大型复合材料构件的三维建模、装配特征提取以及对缝协调分析等处理提供高质量数据基础。
[0041]
以上实施方式对本发明进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1