一种基于三维聚集指数模型的作物叶面积指数图像分析算法
本发明涉及作物叶面积指数图像分析领域,具体而言,涉及一种基于三维聚集指数模型的作物叶面积指数图像分析算法。
背景技术:
1、聚集指数定义为有效叶面积指数(有效lai,le)与叶面积指数(lai,l)的比值,它描述了叶子的聚集或分散程度。通常假设叶子是随机分布,此时我们叫做有效lai。然而,在田间条件下,叶子并不是随机分布,因此假设随机分布的叶子会导致低估田间测量的lai,使用聚集指数模型有助于提高测量精度,为测量装置的升级提供理论支持。
2、2.现有技术方案介绍
3、聚集指数的计算通常设计两个步骤。第一步骤,建立输入参数与聚集指数之间的数学关系来描述叶子的空间分布,即聚集指数建模。当模型建立后,如何获取模型中的输入参数是一个关键问题,需要在第二个步骤中解决。为了减少对植被的破坏,通常采用光学设备间接测量来获取聚集指数模型中的输入参数。为了获取方便,这些输入参数是易于测量的变量。在光学测量中,孔隙更容易被光学设备识别。因此,可以建立孔隙与聚集指数之间的数学关系,进一步反演出聚集指数。
4、在聚集指数建模过程中,有两种方法来处理孔隙问题。一种方法是应用孔隙大小累积函数来描述在截断(即一维测量路径)中大于某个孔隙大小(孔隙某一方向的长度)的分数。基于孔隙大小累积函数,建立了孔隙大小与聚集指数的数学方程,利用光学设备测量的孔隙大小作为反演聚集指数的输入参数。在另一种方法中,渗透函数用于描述观察区域的孔隙率。类似地,该方法就是开发了孔隙率和聚集指数之间的数学关系来反演聚集指数。然而,基于这些方法开发的模型,叶片分布的变化通常假定在水平方向上是各向同性的,例如:cc、ccl、lx、clx聚集指数模型。这些模型都是一维聚集指数模型。为使一维聚集指数模型计算聚集指数更加准确,在测量孔隙大小时通常采用长距离截断,使测量的样本量尽可能的接近统计总体量,满足统计学的一些要求。在统计上,根据poisson分布理论,要达到95%的准确度,截断的长度应至少是主要植物结构(如树冠和作物行)之间平均距离的10倍,这就意味着需要几十米测量长度。对于跨度大、枝高高的森林冠层,林下测量可以满足了这种截断要求。但这种方式不适用于农作物的测量,因为农作物冠层茂密,没有枝高,测量多依赖样方采样。因此,有必要开发一个三维的聚集指数模型来计算作物的聚集指数,提高真实叶面积指数精度,然而作物叶片水平空间分布复杂,其各项异性较强,如何考虑叶片水平分布的各向异性。这是建立三维聚集指数模型的关键问题。
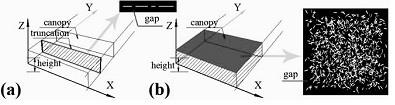
5、在第二个步骤中,有两种类型的光学设备用于测量所建立模型的输入参数,即非成像传感器和成像传感器。非成像传感器包括线量子传感器、辐射计和电容传感器等,它们使用光信号来测量基于截断采样的输入参数,此时获取数据为线数据或条纹数据。通常三维聚集指数模型要考虑了叶片水平分布的各向异性。因此,非成像传感器不适合测量三维聚集指数模型中涉及的输入参数。然而,成像传感器可有效测量面积数据,使用最为普遍的成像光学传感器是相机。根据镜头的不同,开发了两种测量方法,即基于鱼眼镜头的半球摄影(hp)和基于标准镜头的数字覆盖摄影dcp。半球摄影获得了带有极坐标系的圆形图像。在圆形图像中,像素变形(见图4.(a)),这导致长度值的计算不准确。然而,在农业领域,多基于样方的采样进行测量,即:基于面积数据。与半球摄影相比,数字覆盖摄影得到的是直角坐标系的正方形(或矩形)图像,在已知拍摄高度的情况下准确推导出像元尺寸。这样可以很容易地获得样方中的长度参数,例如:叶子宽度、孔隙尺寸累积函数。此外,数字覆盖摄影可以获得与遥感图像像元相匹配的现场测量数据,因此,数字覆盖摄影具有应用于跨学科研究的潜力。
6、尽管数字覆盖摄影用于农田测量,但以往的研究主要集中在一维聚集指数模型上,例如:目前最流行的聚集指数模型,即lx聚集指数模型。该模型基于穿透函数,其表达式为:
7、
8、式中:p(θ)是单次测量的孔隙度、是计算p(θ)的平均值后的对数值、是p(θ)的对数的平均值、lx聚集指数模型是典型的一维聚集指数模型,它通过测量一个截断(截断长度为叶子特征宽度的10倍)上的大量p(θ)来计算聚集指数。虽然lx聚集指数模型提出的较早,但该模型一直沿用至今。在此模型的基础上,后续研究还开发了一些其他模型,例如,clx模型。这些研究中的模型是一维聚集指数模型,忽略了叶片水平分布的各向异性。因此,如何修改lx模型以考虑叶片水平分布的各向异性是农业中未解决的问题。
技术实现思路
1、本发明正是基于上述技术问题至少之一,提出了一种基于三维聚集指数模型的作物叶面积指数图像分析算法。
2、一种基于三维聚集指数模型的作物叶面积指数图像分析算法,其步骤包括:
3、s1、构建3d聚集指数模型,为了描述叶片水平分布的各向异性,类比lx聚集指数模型的方法,即渗透函数,推导孔隙度与聚集指数数学关系的公式,即3d聚集指数模型公式:
4、
5、式中:pm(θ)是非随机分布叶片的孔隙度,为模型的输入参数,代表使用dcp现场测量的田间条件下的孔隙度,pr(θ)是随机分布叶片的孔隙度;
6、s2、计算随机分布叶片的孔隙度pr(θ),引入植物学分类中叶序,即水平方向上,叶片在茎上的分布包括对生模式、互生模式、轮生模式、簇生模式,基于上述模式,随机分布叶的孔隙度pr(θ)的计算步骤如下:
7、s21、分析单层中的个体潜在孔隙区域,用网格分析在植被覆盖率(fvc)测量类推计算出随机分布叶片的个体潜在孔隙区域,在网格分析中,根据对生、互生、轮生模式,局部随机分布的叶片中的孔隙区域分解为四个个体的潜在孔隙区域ai(λ),即孔隙区域1、孔隙区域2、孔隙区域1*+4、孔隙区域3,根据叶尖的方向不同,在x方向和y方向均存在两种情况,所以,四个个体的潜在孔隙区域ai(λ)进一步分为7种:a1_x,a1_y,a2_x,a2_y,a14_x,a14_y,a3,其公式表为:
8、
9、s22、计算单层随机分布叶片的平均孔隙区域面积a(λ):
10、a(λ)=ai(λ)×n(λ) (3)
11、式中:n(λ)单层中个体潜在孔隙区域的数量;
12、将单层中随机分布叶片的平均孔隙区域面积a(λ)除以光学设备的观察面积at,得到单层中随机分布的叶片的孔隙度p(a∨b):
13、p(a∨b)=a(λ)/at (4)
14、式中:v为数学符号“或”;
15、s23、考虑叶片上空隙与下空隙重叠的情况,推导出垂直方向上的孔隙度pr(θ)的公式为:
16、
17、式中:δ是0到1之间的随机数;
18、s3、确定像素表示的实际大小,采用几何光学的原理,计算图像中的实际长度或实际宽度,具体的公式为:
19、
20、式中:h从相机到树冠顶部的垂直高度,并记录在测量值中;fov是相机的视野;d图像中实际长度d1或实际宽度d2的通用符号;
21、公式(6)结合相机的像素数npixel,得到像素实际大小d:
22、d=d/npixel (7)
23、s4、计算非随机分布叶片的孔隙度pm(θ),使用lab的空间转换技术,将相机拍摄的彩色图像转换为二值图像,像素值为0表示土壤,255表示植被,基于二值图像,得到pm(θ)的公式:
24、
25、式中:ns是土壤像素数,nv是植被像素数;
26、s5、将获得的随机分布叶片的孔隙度pr(θ)和非随机分布叶片的孔隙度pm(θ)和计算机图形学耦合得到的参数代入到公式(2)中计算出聚集指数。
27、进一步,在步骤s1中,3d聚集指数模型的具体推导方法如下:
28、s11、在markov模型中提出了渗透函数:
29、
30、其中g(θ,θl)为g函数,表示树叶面积在θ方向的投影函数,即:
31、
32、其中a(θ,θl)是方程(10)中的核函数,表示θ方向上的树叶密度与树叶密度之间的比例分数,ψ=cos-1(cotθcotθl),g(θl)是叶倾角分布函数ladf,选择选择beta函数来描述ladf,在斜点样方法的研究中,当θ=57.5°时g函数约等于0.5,因此方程(10)和(11)可以简化为:
33、
34、当叶片不是随机分布时,非随机分布的叶片的孔隙度是:
35、
36、其中ωe是聚集指数,公式(13)和公式(9)的两边取对数再相除,得到公式(2):
37、
38、进一步,在步骤s2中,将单层中随机分布叶片的平均孔隙区域划分为单层中具有对生或互生模式的随机分布叶片的平均孔隙区域和单层轮生状随机分布叶片的平均孔隙区域其表达式为:
39、
40、式中:λ1是一个变量,表示随机分布的叶片孔隙尺寸,叶尖平行于x方向,λ2也是一个变量,表示随机分布的孔隙尺寸或随机分布的叶片,叶尖平行于y方向,f是投影椭圆与椭圆的比值,f是控制天顶角孔隙度变化的一个因素,表达式为:
41、
42、公式(14)中,aa、ab、ac是随机分布的叶片的孔隙面积,表达式为:
43、
44、
45、
46、式中:w*是叶片的平均宽度,l*是叶片的平均长度,σ是叶片的面积,σ=0.25πw*l*,将dcp拍摄的照片对应的实际区域作为观察层区域,因此d1为x方向的截断,即照片长度;d2是y方向的截断,即照片宽度;
47、n(λ1)表示叶尖平行于x方向的随机分布叶孔隙尺寸大于λ1的数量,n(λ2)表示叶尖平行的随机分布叶片的孔隙尺寸大于λ2的数量到y方向,表达式为:
48、
49、式中:lp是投影有效叶面积指数,lp=g(θ,θl)le/cosθ,g(θ,θl)是叶面积在θ方向的投影函数,σp是叶片的投影面积,w是非水平情况下垂直于截断方向的叶片平均宽度;
50、p(a∨b)被划分为单层中具有对生或互生模式的随机分布的叶片的平均孔隙度和单层具有轮生模式的随机分布叶片的平均孔隙度其表达式展开为:
51、
52、式中:at为dcp所拍照片区域对应的实际面积:at=d1d2 (21)
53、上述公式可看出,公式(20)为公式(5)除以方程(21)获得的,且公式(20)也是公式(4)展开的具体形式。
54、进一步,在步骤s5中,计算机图形学耦合得到的参数为:长度变量:x方向的截断d1、y方向的截断d2、叶平均宽度w*、叶平均长度l*、非水平情况下垂直于截断方向的叶平均宽度w、x方向的最大孔隙尺寸λ1_max、y方向上的最大孔隙尺寸λ2_max;分数变量:非随机分布叶片的孔隙度pm(θ);
55、根据公式(6)、公式(7)、公式(8),可获得x方向的最大孔隙尺寸λ1_max:
56、for x=i;n
57、for y=j;m
58、soil_value[i;j]=max(value=0) (22)
59、number_soil_pixel=mumber(soil_value[*;j])
60、0为土壤像素值,同理可计算出λ2_max和w;
61、使用canny算子提取叶片的边缘,并确定叶片的尖端和底部的图像坐标,基于叶尖和底部的图像坐标,可以计算出w*和l*。
62、进一步,公式(19)的推导过程为:
63、当叶片是随机分布时,norman给出了一个数学形式:
64、
65、其中:n(λ)表示在总样带长度中大于λ的孔隙尺寸的数量,ρ为每单位地表面积的叶片数,σ为叶片面积,w′为垂直于样带方向的叶片平均宽度,d为截断长度,由ρσ=le,le是有效叶面积指数,公式(23)变为:
66、
67、将公式(24)中有效叶面积指数le替换为投影有效叶面积指数lp,其表达式为:
68、
69、设定椭圆形的叶片,获得叶片的投影面积σp:
70、
71、考虑非水平的情况,将lp和σp况引入公式(24)中,则公式(24)变为:
72、
73、由公式(27)得到x方向和y方向的表达式:
74、
75、
76、式中:λ1是一个变量,表示随机分布的叶孔隙尺寸,叶尖平行于x方向,λ2也是一个变量,表示随机分布的叶孔隙尺寸,叶尖平行于y方向。
77、进一步,公式(20)的具体推导过程如下:
78、据个体的潜在孔隙区域(a1_x,a1_y,a2_x,a2_y,a14_x,a14_y,a3),通过分析几何关系,可以得到:
79、在x方向对生和互生的孔隙区域:
80、
81、在y方向上对生和互生的孔隙区域:
82、
83、在x方向上轮生的孔隙区域:
84、
85、在y方向上轮生的孔隙区域:
86、
87、光学设备的观察面积为:。
88、at=d1d2 (34)
89、设x方向和y方向的孔隙区域概率相等,因此,使用x和y方向的平均值作为在水平情况下单层中具有对生或互生模式的随机分布叶片的孔隙度为0.5[eq.(公式(30))+eq.(公式(31))]/eq.(公式(34));水平情况下单层中具有轮生模式的随机分布叶片的孔隙度为0.5[eq.(公式(32))+
90、eq.(公式(33))]/eq.(公式(34)),由此得出:
91、
92、
93、其中:
94、
95、
96、ac=a3(λ1,λ2)n(λ1)n(λ2) (39)
97、其中,λ1是从0到λ1_max的变量,λ2是从0到λ2_max的变量,因此,poa(λ1,λ2)和pw(λ1,λ2)是集合,即:
98、poa(0,0),poa(1,0),poa(1,1),l,poa(λ1_max,λ2_max-1),poa(λ1_max,λ2_max) (40)
99、pw(0,0),pw(1,0),pw(1,1),l,pw(λ1_max,λ2_max-1),pw(λ1_max,λ2_max) (41)
100、公式(40)和公式(41)反应了poa(λ1,λ2)和pw(λ1,λ2)的平均状态,选择平均值作为最终结果以反映综合情况,即和
101、
102、
103、计算非水平情况下的poa(λ1,λ2)和pw(λ1,λ2),需要计算单层从水平情况到非水平情况的面积变化因子,即投影椭圆与椭圆的比值,其公式为:
104、
105、在非水平情况下,只有叶片和孔隙区域两个变量,因此单层中具有对生或互生模式的随机分布叶片的孔隙度为:
106、
107、在非水平情况下,单层中具有轮生模式的随机分布叶片的孔隙度为:
108、
109、选择平均值作为最终结果以反映综合情况即和得到
110、
111、式中:是p(a)或p(b),是p(a)或p(b)。
112、进一步,公式(5)推导过程为:
113、由于上孔隙和下空隙存在重叠惯性系,则基于bayesian分析,得到垂直方向的重叠关系:
114、
115、式中:p(a)是单层中随机分布的叶孔隙度之一,p(b)是另单层中随机分布的叶孔隙度之一;
116、由于公式(48)中,空隙度(p)小于1,其乘积是很小的值,所以将其忽略得到四种情况:
117、
118、在公式(49)中条件概率用于推导p(a|b)和p(b|a)之间的数学关系:
119、
120、再用monte carlo方法,假设p(a|b)为0到1范围内的随机数,然后将随机分布的叶孔隙度假设为pr_1,pr_2,pr_3,和pr_4的累积平均值,得到:
121、
122、在公式(51)中,pr(θ)的四种情况pr_1,pr_2,pr_3,和pr_4具有相同概率的情况下,δ是介于0和1之间的随机数,即p(a|b)。
123、有益效果:
124、1、本发明提出的三维聚集指数模型成功地解决了以往模型低估lai的问题;
125、2、本发明在建模中,推导出描述聚集指数和孔隙度之间数学关系的方程,为各向异性问题提供理论基础,解决了如何建立3d聚集指数模型来描述叶片水平方向空间分布的各向异性的问题;
126、3、本发明中测量3d聚集指数模型的输入参数的方法,解决了如何测量建立的3d模型的输入参数并完成间接测量的问题;
127、4、开发出适合作物样方的测量方法,方便了光学测量,提高了样方计算精度。
- 还没有人留言评论。精彩留言会获得点赞!