环形区域及环形区域目标特征检测方法、检测设备与流程
本发明涉及图像处理领域,具体涉及图像处理领域中,一种环形区域检测方法、对环形区域的目标特征进行检测的方法及检测设备。
背景技术:
1、随着新能源汽车的普及和推广,用户对于汽车的品质和要求不断提高,锂电池作为新能源汽车的重要部件,在安全和续航等多方面起着重要作用。随着机器视觉技术的高速发展,检测的智能化和无人化已经成为很多自动化生产线和工厂追求的目标。汽车用锂电池在生产的过程中,一些微小的缺陷就可能会影响整个锂电池的性能与质量,因此锂电池生产过程中的质量把控尤为关键。
2、锂电池密封钉焊接后,需要对密封钉圆环状区域的焊缝质量进行检测,传统的检测方法一般为人工目检或者手动触检的方式进行。该方法无法做到完全统一的标准,检测时间和成本也较高,在检测过程中,会因为视觉疲劳而导致误检测,同时人手触摸进行检测也容易将手上的污渍留在密封钉表面,可能增加其被腐蚀的风险。同时,随着工艺要求的提高,需要检测更小的缺陷,如0.1mm以下的凹坑、焊爆等。这些缺陷无法依靠人工目检或者手动触检的方式进行检测。因此,如何降低误检率、提升检测效率和提升缺陷的检测能力成为了当前密封钉生产工艺过程中亟待解决的技术问题。
3、利用人工眼睛和/或手感进行对密封钉圆环状区域的焊缝质量进行检测,往往检测出错率较高,且不同的人对缺陷认知不同,使得检测结果可能会出现偏差的问题。当前,越来越多通过2d或3d的相机拍摄图像信息,基于图像的信息进行缺陷检测,然而,基于拍摄的图像对圆环进行拟合时,对于内圆和外圆分别进行圆的拟合,分别获得内圆、外圆的圆心和半径,通过内外圆的圆心取平均值为最终的作为圆环的同心圆的圆心,半径为各自拟合的半径,这种圆环的同心圆拟合方式,只考虑了局部最优,基于该方法拟合的圆环,存在误检率和漏检率偏高的问题。
技术实现思路
1、本发明提供一种环形区域检测方法、对环形区域的目标特征进行检测的方法及检测设备,具有降低误检率和漏检率的特点。
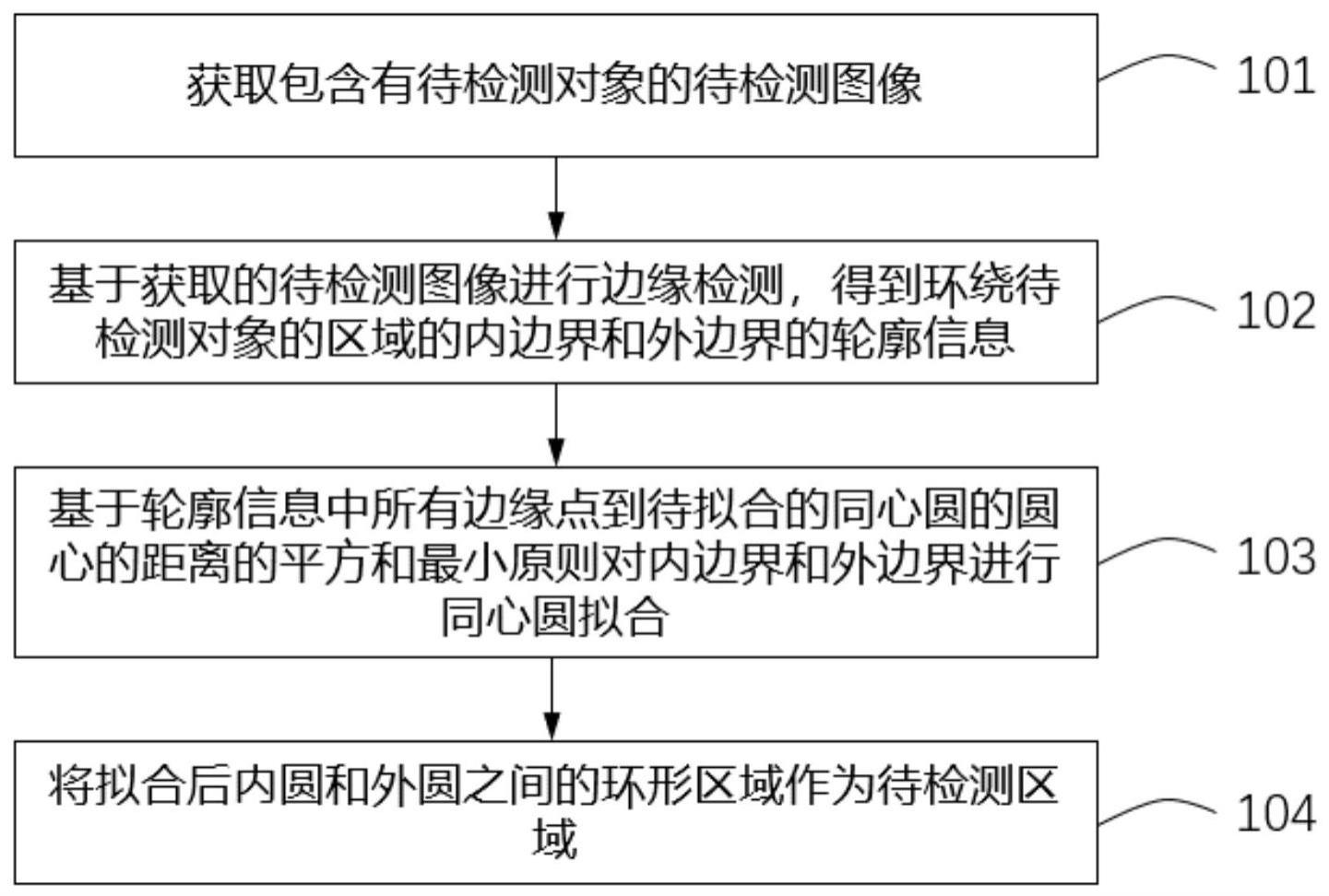
2、根据第一方面,一种实施例中提供一种环形区域检测方法,用于确定环绕待检测对象的环形区域,所述环形区域检测方法包括:
3、获取包含有待检测对象的待检测图像;
4、基于所述待检测图像进行边缘检测,得到环绕待检测对象的区域的内边界和外边界的轮廓信息;
5、基于所述轮廓信息中所有边缘点到待拟合的同心圆的圆心的距离的平方和最小原则对内边界和外边界进行同心圆拟合;
6、将拟合后内圆和外圆之间的环形区域作为待检测区域。
7、一个实施例中,所述的基于所述轮廓信息中所有边缘点到待拟合的同心圆的圆心的距离的平方和最小原则对内边界和外边界进行同心圆拟合,包括:
8、基于所述轮廓信息进行边缘点识别,得到所述轮廓信息中内边界的边缘点集合和外边界的边缘点集合;
9、基于所述内边界的边缘点集合和外边界的边缘点集合中的所有边缘点到待拟合的同心圆的圆心的距离的平方和最小原则,对内边界和外边界进行同心圆拟合,计算出待拟合的同心圆的圆心坐标、内圆半径和外圆半径,从而得到同心圆的内圆和外圆。
10、一个实施例中,所述同心圆拟合的目标函数为:
11、
12、其中,(x0,y0)为待拟合的同心圆的圆心,r1为内圆半径,r2为外圆半径,(xi,yi)为内边界的边缘点的坐标,i为内边界的边缘点的序号,(uj,vj)为外边界的边缘点的坐标,j为外边界的边缘点的序号,n1为内边界边缘点的数量,n2为外边界边缘点的数量。
13、一个实施例中,根据公式
14、
15、计算待拟合的同心圆的圆心(x0,y0);其中,
16、
17、
18、
19、
20、
21、基于得到的待拟合的同心圆的圆心(x0,y0),根据公式
22、
23、计算待拟合的同心圆的内圆半径r1,根据公式
24、
25、计算待拟合的同心圆的外圆半径r2。
26、一个实施例中,所述的基于所述轮廓信息进行边缘点识别,得到所述轮廓信息中内边界的边缘点集合和外边界的边缘点集合,包括:
27、接收用户输入的感兴趣区域,在所述待检测图像上生成初始内边界待检测区域和初始外边界待检测区域;
28、接收用户输入的内边界滑动窗的宽度和位移步长,将内边界滑动窗覆盖所述初始内边界待检测区域,并沿所述初始内边界待检测区域按照所述内边界滑动窗的位移步长位移,每次位移后的内边界滑动窗形成一个内边界检测子区域;
29、接收用户输入的外边界滑动窗的宽度和位移步长,将外边界滑动窗覆盖所述初始外边界待检测区域,并沿所述初始外边界待检测区域按照所述外边界滑动窗的位移步长位移,每次位移后的外边界滑动窗形成一个外边界检测子区域;
30、在每个内边界检测子区域内检测一个内边界边缘点,在每个外边界检测子区域内检测一个外边界边缘点;
31、基于所有内边界检测子区域内检测到的内边界边缘点,得到内边界的边缘点集合,基于所有外边界检测子区域内检测到的外边界边缘点,得到外边界的边缘点集合。
32、一个实施例中,所述的基于所述轮廓信息进行边缘点识别,得到所述轮廓信息中内边界的边缘点集合和外边界的边缘点集合,包括:
33、接收用户输入的感兴趣区域,在所述待检测图像上生成初始环形待检测区域;
34、接收用户输入的滑动窗的宽度和位移步长,将滑动窗覆盖所述初始环形待检测区域的内、外边界,并沿所述初始环形待检测区域按照所述位移步长位移,每次位移后的滑动窗形成一个检测子区域;
35、在每个检测子区域内检测两个边缘点;
36、对所有检测子区域内检测到的边缘点进行聚类,得到内边界的边缘点集合和外边界的边缘点集合。
37、一个实施例中,在每个检测子区域内检测边缘点的方法包括:
38、利用所述待检测区域内各像素点的灰度值构建灰度投影曲线f;
39、对所述灰度投影曲线f进行梯度计算以得到梯度投影曲线f′;
40、基于所述梯度投影曲线f′进行边缘点的筛选。
41、一个实施例中,基于所述梯度投影曲线f′进行边缘点的筛选,包括:
42、对梯度投影曲线f′上的点进行阈值筛选,筛选出大于预设阈值的峰值点;
43、对峰值点进行极性筛选,筛选出与预设极性相同的峰值点;
44、对经过极性筛选后的峰值点再进行位置筛选,按照从开始点、末尾点、最近中心和最大强度中的任选的一种方式筛选出边缘点。
45、一个实施例中,对所有检测子区域内检测到的边缘点进行聚类,包括:
46、获取所有边缘点的中心坐标点;
47、计算所有边缘点到中心坐标点的距离;
48、对所述距离进行投票,获取距离的统计信息;
49、对所述距离按照预设步长进行离散化,获取所述统计信息的索引;
50、获取从最小距离开始查找的为内边界边缘点概率最大的距离dmin、从最大距离开始查找的为外边界边缘点概率最大的距离dmax,取平均值到中心坐标点的距离小于所述平均值的边缘点为内边界边缘点,到中心坐标点的距离大于所述平均值的边缘点为外边界边缘点。
51、根据第二方面,一种实施例中提供一种对环形区域的目标特征进行检测的方法,包括:
52、采用上述任一项所述的环形区域检测方法获取作为待检测区域的环形区域;
53、将环形的待检测区域的图像转换为矩形区域的图像;
54、基于矩形区域的图像进行目标特征检测。
55、一个实施例中,将环形的待检测区域的图像转换为矩形区域的图像包括:
56、获取环形待检测区域的同心圆的圆心坐标、内圆半径和外圆半径;
57、根据预先设定的半径步长和角度步长,对环形待检测区域进行区域划分,得到连续的扇形子区域;
58、将扇形子区域相对于同心圆圆心的极坐标转换为直角二维坐标系中的坐标,并将扇形子区域转换为直角二维坐标系中对应坐标位置处的矩形子区域;
59、根据扇形子区域的各像素的灰度值及图像插值生成矩形子区域的图像;
60、将与所有扇形子区域一一对应的矩形子区域的图像组成为矩形区域的图像。
61、一个实施例中,所述角度步长为:
62、
63、其中,l为预设的离散化后的距离精度,r1和r2分别为内圆和外圆的半径。
64、一个实施例中,根据扇形子区域的各像素的灰度值及图像插值生成矩形子区域的图像包括:
65、获取待生成的矩形子区域的像素点的离散化半径dk和离散化角度θk;其中,k为像素点的序号;
66、基于所述同心圆的圆心坐标(x0,y0)、离散化半径dk和离散化角度θk,获取所述像素点在扇形子区域中的坐标(rk,ck):
67、rk=x0-dk sinθk,ck=y0+dk cosθk
68、根据扇形子区域中对应位置邻域范围内的灰度值和坐标进行最近邻或者双线性或者双三次插值,获得矩形子区域的图像。
69、一个实施例中,获取的待检测对象的待检测图像为纹理图像或形貌图像,包括:获取由视觉传感器输出的包含有待检测对象的二维图像和三维图像,所述二维图像包括待检测图像的包含有灰度信息的纹理信息,三维图像包括待检测图像的包含有高度信息的形貌信息。
70、一个实施例中,基于矩形区域的图像进行目标特征检测包括:
71、获取待检测对象的二维图像和三维图像,对二维图像进行特征编码得到特征图α1,对三维图像进行特征编码得到特征图α2;
72、对特征图α1进行多尺度特征抽取处理后得到特征图η1,对特征图α2进行多尺度特征抽取处理后得到特征图η2;
73、将特征图η1和特征图η2作为输入特征图进行特征融合运算获得最终特征图;
74、将最终特征图通过1×1卷积运算和sigmoid激活函数得到最终结果。
75、一个实施例中,基于矩形区域的图像进行目标特征检测还包括:
76、对特征图η1和特征图η2进行位置增强编码,位置增强编码公式可表示为:
77、
78、其中,x、y分别为与x轴和y轴平行的坐标信息,d指的是特征图的通道数量,p为特征图η1的通道索引信息,q为特征图η2的通道索引信息;根据该公式依次对特征图η1和特征图η2进行位置增强编码获得与输入特征图等大、通道数量相同的特征图γ;
79、将特征图η1与特征图γ进行通道相加运算后获得特征图μ1,将特征图η2与特征图γ进行通道相加运算后获得特征图μ2;
80、将特征图μ1和特征图μ2作为输入特征图进行特征融合运算获得最终特征图。
81、一个实施例中,所述特征编码包括:
82、获取输入的图像,所述输入的图像为所述二维图像或三维图像;
83、将输入的图像经过两次卷积运算和非线性激活运算后获得第一特征图;
84、将第一特征图经过不同尺度的池化运算形成不同尺度的m个第二特征图,其中m为尺度的数量;
85、将m个第二特征图分别进行卷积和上采样后,得到m个与第一特征图等大小的第三特征图;
86、将所有的m个第三特征图与第一特征图进行通道拼接处理后,得到多尺度的融合特征图;
87、将多尺度的融合特征图进行卷积运算后获得新的第一特征图;
88、将新的第一特征图重复若干次上述经不同尺度的池化运算到得到新的第一特征图的过程完成特征编码。
89、一个实施例中,将输入特征图进行特征融合运算获得最终特征图,包括:
90、将输入特征图进行通道拼接后,进行1×1卷积运算,得到第一融合特征图;
91、将第一融合特征图进行通道划分,平均划分为4份,分别表示为i1、i2、i3、i4,其中,i1直接输出为特征图j1,j1和i2道拼接后进行3×3卷积运算后输出为特征图j2,j2和i3通道拼接后进行3×3卷积运算后输出为特征图j3,j3和i4通道拼接后进行3×3卷积运算后输出为特征图j4,将j1、j2、j3、j4进行通道拼接后,再进行1×1卷积运算,获得第二融合特征图;
92、将第二融合特征图与输入特征图进行相加运算后,获得第三融合特征图;
93、将第三融合特征图作为输入,重复若干次上述将第一特征图进行通道划分再得到第三融合特征图的过程,获得最终的特征图。
94、根据第三方面,一种实施例中提供一种检测设备,包括:
95、图像传感器,用于获取包含有待检测对象的图像并输出;
96、存储器,用于存储程序;
97、处理器,用于通过执行所述存储器存储的程序以实现上述任一项所述的环形区域检测方法,所述待检测图像为纹理图像或形貌图像。
98、根据第四方面,一种检测设备,包括:
99、视觉传感器,用于获取包含有待检测对象的二维图像和三维图像并输出,所述二维图像包括待检测图像的包含有灰度信息的纹理信息,三维图像包括待检测图像的包含有高度信息的形貌信息;
100、存储器,用于存储程序;
101、处理器,用于通过执行所述存储器存储的程序以实现上述任一项所述的对环形区域的目标特征进行检测的方法,所述待检测图像为纹理图像或形貌图像。
102、根据第五方面,一种计算机可读存储介质,所述介质上存储有程序,所述程序能够被处理器执行以实现上述任一项所述的环形区域检测方法和/或对环形区域的目标特征进行检测的方法。
103、依据上述实施例的环形区域检测方法,由于基于轮廓信息中所有边缘点到待拟合的同心圆的圆心的距离的平方和最小原则对内边界和外边界进行同心圆拟合,使得在对环形区域进行同心圆拟合后得到的环形区域,可以实现全局最优,综合考虑了内外圆进行圆心和半径的估计,估计的圆心与真实的同心圆重合度更高,更符合真实结果,对基于该方法确定的环形区域进行目标特征检测,可以降低误检率和漏检率。
104、依据上述实施例的对环形区域的目标特征检测的方法,由于目标特征检测所基于的环形区域采用上述更符合真实效果的同心圆拟合方式得到,从而可以降低目标特征检测的误检率和漏检率;由于目标特征检测前先将环形的待检测区域的图像转换为矩形区域的图像,进一步降低了边界的误检率。
- 还没有人留言评论。精彩留言会获得点赞!