目标追踪的数据关联方法、电子设备及存储介质与流程
本申请涉及计算机视觉领域,尤其涉及一种目标追踪的数据关联方法、电子设备及存储介质。
背景技术:
1、在现有多目标跟踪应用场景中,需要在目标检测的基础上,通过进行数据关联处理,将不确定来源的测量数据关联到某个目标源,例如,将两帧之间的测量数据与对应目标源进行关联,从而确定这两帧测量数据是否属于同一个目标对象。
2、为了降低多目标跟踪场景下的计算复杂度,一般是采用最近邻算法(k-nearestneighbor,简称knn)将测量数据关联到对应的目标源。但是,现有knn算法的关联门范围值(即目标源及其该目标源附近区域构成的搜索子空间)的设置依赖于人为经验,其数据关联准确性还有待得到进一步提升。
技术实现思路
1、第一方面,本申请实施例提供了一种目标追踪的数据关联方法,包括:
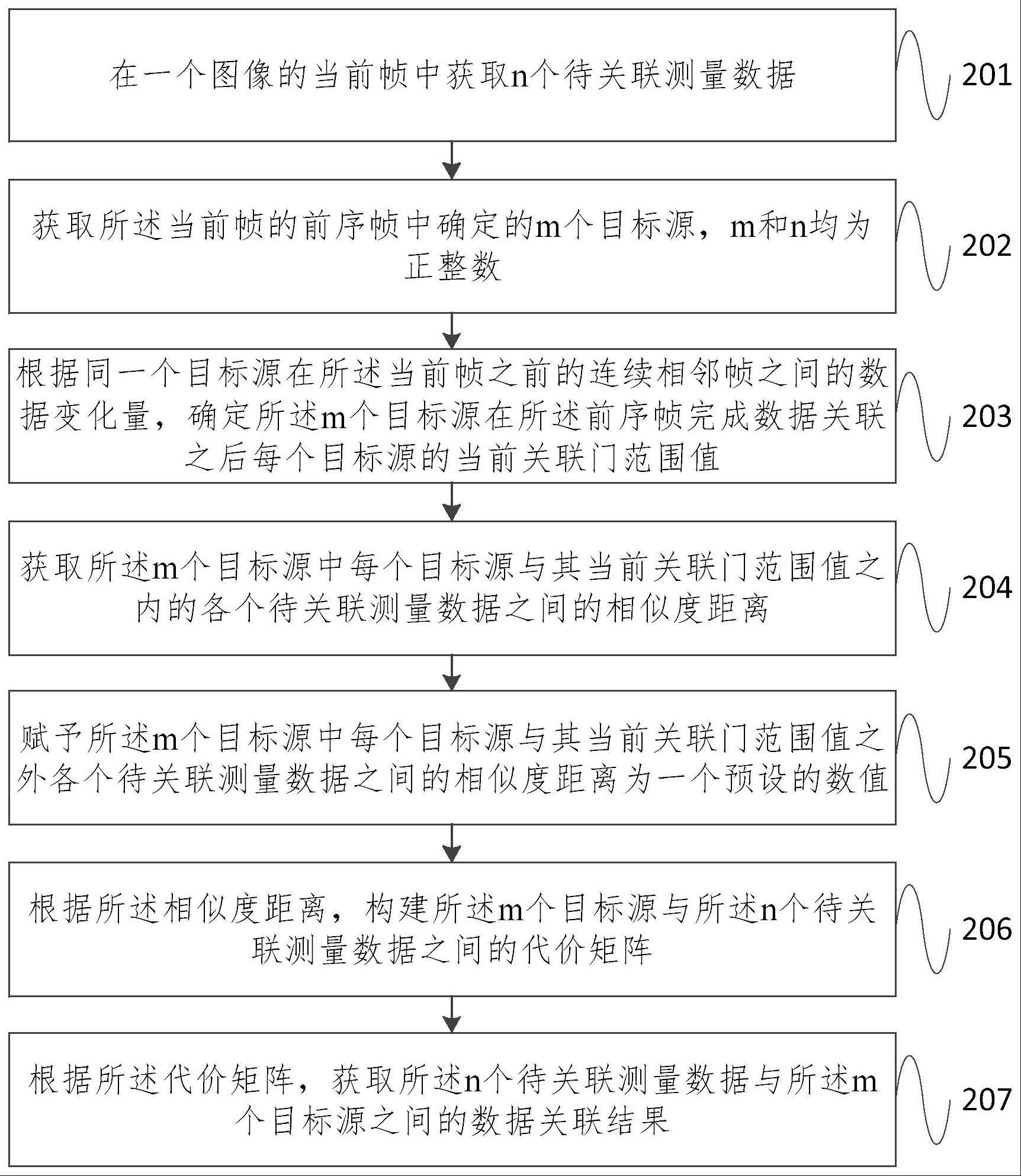
2、在一个图像的当前帧中获取n个待关联测量数据;
3、获取所述当前帧的前序帧中确定的m个目标源,m和n均为正整数;
4、根据同一个目标源在所述当前帧之前的连续相邻帧之间的数据变化量,确定所述m个目标源在所述前序帧完成数据关联之后每个目标源的当前关联门范围值;
5、获取所述m个目标源中每个目标源与其当前关联门范围值之内的各个待关联测量数据之间的相似度距离;
6、赋予所述m个目标源中每个目标源与其当前关联门范围值之外各个待关联测量数据之间的相似度距离为一个预设的数值;
7、根据所述相似度距离,构建所述m个目标源与所述n个待关联测量数据之间的代价矩阵;
8、根据所述代价矩阵,获取所述n个待关联测量数据与所述m个目标源之间的数据关联结果。
9、在一些实施例中,所述根据同一个目标源在所述当前帧之前的连续相邻帧之间的数据变化量,确定所述m个目标源在所述前序帧完成数据关联之后每个目标源的关联门范围值,包括:
10、通过连续多帧的目标源和测量数据关联,获取每个目标源在每两个连续相邻帧之间的数据变化量;
11、对每个目标源,基于连续相邻帧的所述数据变化量,分别得到每个目标源的最大数据变化量;
12、根据所述每个目标源的最大数据变化量和初始关联门范围值,获取当前帧中每个目标源在所述前序帧完成数据关联之后的当前关联门范围值。
13、在一些实施例中,所述方法还包括:
14、根据所述每个目标源的最大数据变化量和所述初始关联门范围值,通过关联门范围值公式,分别获取在所述前序帧完成数据关联之后每个目标源的当前关联门范围值,所述关联门范围值公式为:
15、rk=e-αkr0+(1-e-αk+c)δsmax;
16、δsmax=max{δs1,...,δsk};
17、其中,rk表示一个目标源在完成第k帧时的关联计算后的当前关联门范围值,r0表示初始关联门范围值且大于预设正常关联门半径,a为一个大于0的参数,c表示补偿项参数,δsmax表示最大数据变化量,δsk表示第k-1帧到第k帧时所述目标源的数据变化量,k是一个标记所述目标源被追踪帧数的正整数,每个目标源有自己的k值。
18、在一些实施例中,所述m个目标源中每个目标源与其当前关联门范围值之内的各个待关联测量数据之间的相似度距离,为每个目标源与其当前关联门范围值之内的各个待关联测量数据之间的马式距离。
19、在一些实施例中,所述预设的数值为一个远大于预设正常距离的常数。
20、在一些实施例中,所述根据所述代价矩阵,获取所述n个待关联测量数据与所述m个目标源之间的数据关联结果,包括:
21、对所述代价矩阵进行求解,获取所述m个目标源与所述n个待关联测量数据之间的最优关联对;
22、将各个所述最优关联对的相似度距离与预设代价阈值进行比较,获取每个所述待关联测量数据与各个所述目标源之间的数据关联结果,其中,所述预设代价阈值为所述常数的一半。
23、在一些实施例中,所述将各个所述最优关联对的相似度距离与预设代价阈值进行比较,获取每个所述待关联测量数据与各个所述目标源之间的数据关联结果,包括:
24、确定第一个最优关联对的相似度距离小于等于所述预设代价阈值,确定所述第一个最优关联对中的待关联测量数据与目标源关联成功,将关联成功的所述待关联测量数据更新到关联成功的目标源中,更新所述关联成功的目标源的数据变化量和关联门范围值;
25、确定第二个最优关联对的相似度距离大于所述预设代价阈值,确定所述第二个最优关联对未关联成功,并断开所述第二个最优关联对中的待关联测量数据与未关联成功的目标源之间的关联关系。
26、在一些实施例中,所述方法还包括:
27、将所述未关联成功的目标源标记为数据丢失源,并重新对所述数据丢失源进行追踪,若在预设时间段内保持为数据丢失状态,则删除所述数据丢失源;
28、将未关联成功的测量数据初始化成新目标源,并根据所述新目标源的初始关联门范围值在下一帧对所述新目标源进行数据关联。
29、第二方面,本申请实施例提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的方法。
30、第三方面,本申请实施例提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的方法。
技术特征:
1.一种目标追踪的数据关联方法,其特征在于,包括:
2.根据权利要求1所述的目标追踪的数据关联方法,其特征在于,所述根据同一个目标源在所述当前帧之前的连续相邻帧之间的数据变化量,确定所述m个目标源在所述前序帧完成数据关联之后每个目标源的关联门范围值,包括:
3.根据权利要求2所述的目标追踪的数据关联方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的目标追踪的数据关联方法,其特征在于,所述m个目标源中每个目标源与其当前关联门范围值之内的各个待关联测量数据之间的相似度距离,为每个目标源与其当前关联门范围值之内的各个待关联测量数据之间的马式距离。
5.根据权利要求1所述的目标追踪的数据关联方法,其特征在于,所述预设的数值为一个远大于预设正常距离的常数。
6.根据权利要求5所述的目标追踪的数据关联方法,其特征在于,所述根据所述代价矩阵,获取所述n个待关联测量数据与所述m个目标源之间的数据关联结果,包括:
7.根据权利要求6所述的目标追踪的数据关联方法,其特征在于,所述将各个所述最优关联对的相似度距离与预设代价阈值进行比较,获取每个所述待关联测量数据与各个所述目标源之间的数据关联结果,包括:
8.根据权利要求7所述的目标追踪的数据关联方法,其特征在于,所述方法还包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述的目标追踪的数据关联方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的目标追踪的数据关联方法。
技术总结
本申请提供一种目标追踪的数据关联方法、电子设备及存储介质,涉及计算机视觉领域,该方法包括:在一个图像的当前帧中获取n个待关联测量数据;获取所述当前帧的前序帧中确定的m个目标源,m和n均为正整数;根据同一个目标源在所述当前帧之前的连续相邻帧之间的数据变化量,确定所述m个目标源在所述前序帧完成数据关联之后每个目标源的当前关联门范围值;获取相似度距离;根据所述相似度距离,构建所述m个目标源与所述n个待关联测量数据之间的代价矩阵;根据所述代价矩阵,获取所述n个待关联测量数据与所述m个目标源之间的数据关联结果。本申请提高了数据关联准确性。
技术研发人员:屈洋,郝冬宁,李文卿,仲余
受保护的技术使用者:湖北星纪时代科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!