一种分布式多传感器融合跟踪方法和系统
本发明涉及智能汽车的环境感知领域,特别是涉及一种基于扩展标签多伯努利滤波(labeled multi-bernoulli,lmb)的分布式多传感器融合跟踪方法和系统。
背景技术:
1、智能汽车的行驶环境,尤其是城市道路环境,具有较高的复杂度与动态性,对车辆感知系统的精度、稳定性、实时性提出较高的要求。利用多传感器数据进行融合感知,基于不同传感器的数据特征以及更加广泛的时空感知范围,既能提高目标跟踪的精度、降低虚警率,又能在单传感器失效时维持感知功能,保证感知结果的鲁棒性。
2、多传感器融合跟踪研究主要分为集中式融合与分布式融合。集中式融合将各传感器的原始量测信息直接传入融合中心,由融合中心对原始量测信息进行统一处理,实现多目标跟踪,虽然能够充分利用各传感器的原始量测信息,但是由于车辆感知传感器信息量很大,集中式融合对通信带宽要求高,融合中心的计算负载大,对于感知的实时性提出了挑战。同时,一旦融合中心出现故障,整个传感器网络的信息融合功能性能降低甚至瘫痪,系统的稳定性较差。
3、在分布式融合的结构下,各传感器对于量测信息分别处理得到初步的检测结果,再通过融合处理得到最终的跟踪轨迹。相较于集中式融合,这种方法对系统带宽要求低,同时使得系统更加稳定。但是各传感器的初步检测结果存在不一致性,融合中心对于低置信度的传感器信息使用率较低。
4、另外,传统的分布式融合基本利用“量测-航迹”关联的框架,先利用各传感器感知结果进行同一目标的关联,再通过数据关联算法进行航迹与量测的关联,依据关联结果进行状态估计。在这种算法框架下,数据关联成为融合算法的核心组成部分。常用数据关联算法例如全局最近邻关联(gnn)、联合概率密度关联(jpda)和多假设跟踪(mht)等,各有各的优势,也得到了广泛的应用。但是这些关联算法存在的统一问题是由于本身是np-hard(non-deterministic polynomial hard)计算复杂度(需要超多项式时间才能求解的问题),在目标或虚警密集的场景下出现“组合爆炸”现象,带来计算瓶颈,在计算效率和跟踪性能上无法满足实际需求。同时,如何度量不同传感器不同特征的感知数据对同一目标的观测,也成为了分布式融合的一大技术难点。
技术实现思路
1、针对上述问题,本发明的目的是提供一种分布式多传感器融合跟踪方法和系统,该方法利用随机有限集的多目标跟踪技术,将单目标贝叶斯滤波框架直接扩展至多目标情形,直接估计多目标的数量与状态,避免了复杂的数据关联过程。采用分布式多传感器信息融合结构,每个传感器视为一个独立节点,包含自身量测信息处理模块及融合信息处理模块。自身量测信息处理模块采用扩展标签多伯努利滤波实现局部的目标轨迹估计,得到目标状态集的概率后验密度。融合信息处理模块接收本地及其他节点传入的后验估计结果,利用gci规则实现融合,将更新后的结果发送至其他节点,实现了多传感器对同一目标观测的统一。
2、为实现上述目的,本发明采取以下技术方案:
3、第一方面,本发明提供一种分布式多传感器融合跟踪方法,包括以下步骤:
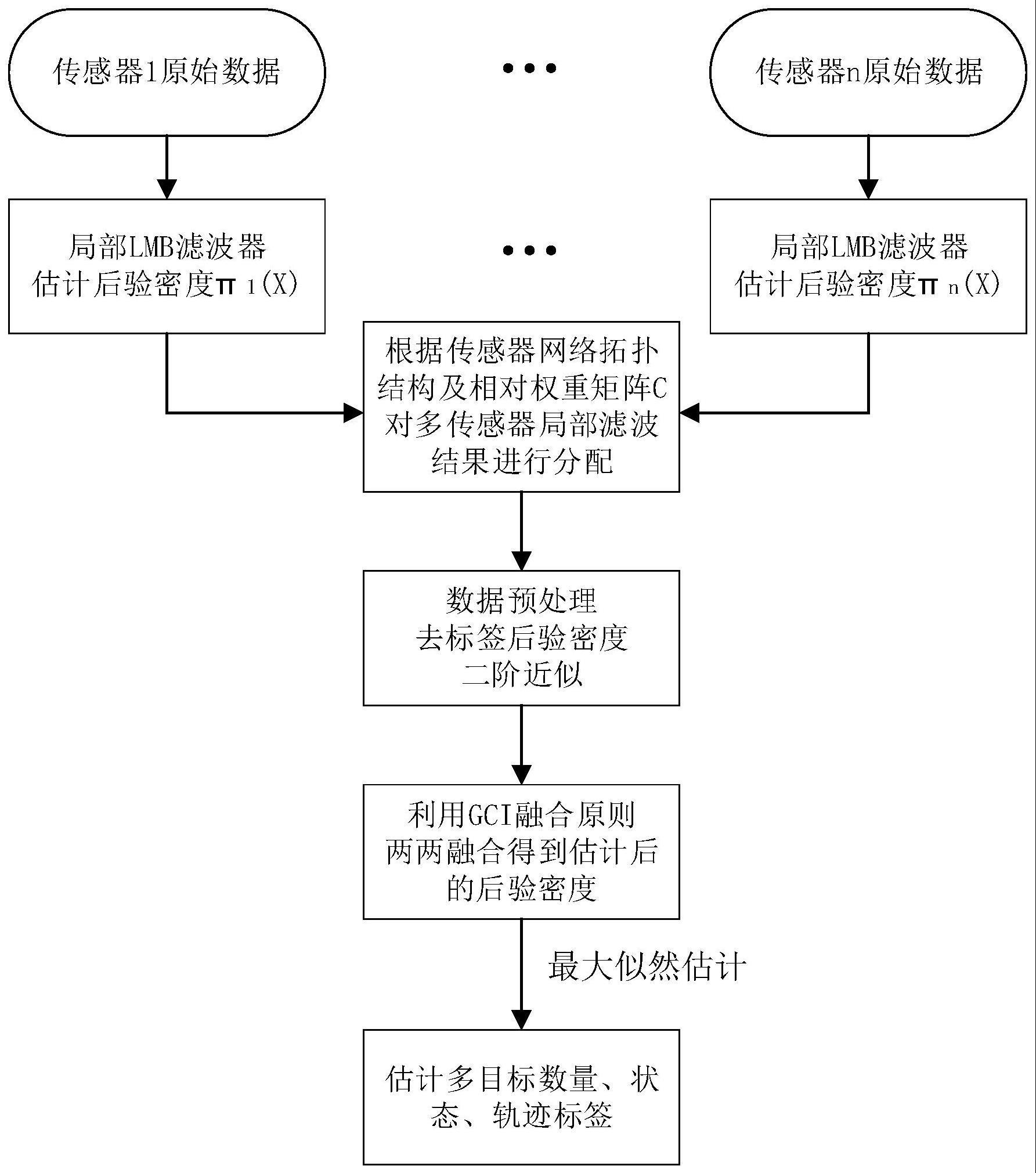
4、获取各传感器的原始测量信息,并采用预先建立的基于扩展标签多伯努利滤波器,得到多传感器局部后验概率密度;
5、确定分布式多传感器融合网络拓扑结构及相对权重矩阵,并基于相对权重矩阵对多传感器局部后验概率密度进行融合,得到融合概率后验密度;
6、根据融合概率后验密度,进行目标状态与数量的更新,得到分布式多传感器融合跟踪结果。
7、进一步,所述获取各传感器的原始测量信息,并采用预先建立的基于扩展标签多伯努利滤波器,得到多传感器局部后验概率密度,包括:
8、将当前时刻k环境中的感兴趣目标作为目标集,各传感器的测量信息作为观测集,并基于扩展标签多伯努利滤波器对观测集进行滤波,得到当前时刻对状态集的局部后验概率密度估计结果;
9、根据当前时刻k状态集的局部后验概率密度估计以及运动模型,对下一时刻k+状态集的局部后验概率密度估计进行预测;
10、根据k+1时刻传感器获取的观测集以及k+1时刻状态集的局部后验概率密度估计结果,对k+1时刻状态集的后验密度进行更新;
11、重复上述步骤,得到多传感器每一时刻状态集的局部后验概率密度。
12、进一步,所述确定分布式多传感器融合网络拓扑结构及相对权重矩阵,并基于相对权重矩阵对多传感器局部后验概率密度进行融合,得到融合概率后验密度,包括:
13、确定分布式多传感器融合网络拓扑结构;
14、确定分布式多传感器融合网络的相对权重矩阵;
15、基于相对权重矩阵对多传感器局部后验概率密度进行融合,得到融合概率后验密度。
16、进一步,所述分布式多传感器融合网络拓扑结构为:
17、每一类传感器里分别设置局部中心传感器和周围传感器;当周围传感器数量较多时,则按照设定顺序两两融合,最后一级周围传感器将融合结果传入中心传感器;
18、对于不同类型的中心传感器而言,两两中心传感器按照设定顺序两两融合,最后的中心传感器输出最终融合结果。
19、进一步,所述确定分布式多传感器融合网络的相对权重矩阵,包括:
20、采取degroot模型,得到分布式多传感器融合网络的信任度矩阵;
21、根据分布式多传感器融合网络拓扑结构,得到分布式多传感器融合网络的邻接矩阵;
22、基于信任度矩阵和邻接矩阵,确定分布式多传感器融合网络的相对权重矩阵。
23、进一步,所述基于相对权重矩阵对多传感器局部后验概率密度进行融合,得到融合概率后验密度,包括:
24、在k时刻,传感器s的本地滤波器基于其原始测量信息得到局部后验概率密度估计,并将该信息发送到其融合处理模块;
25、融合处理模块将局部概率后验密度估计发送至该节点对应的接收节点p,同时接收传入节点q的局部概率后验密度估计;
26、在得到各传感器的局部后验概率密度后,在gci融合原则下,根据各传感器本地局部后验概率密度,进行次优分布融合,得到融合概率后验密度。
27、进一步,所述根据融合概率后验密度,进行目标状态与数量的更新,得到分布式多传感器融合跟踪结果,包括:
28、对得到的融合概率后验密度,进行剪枝、截断和合并,去掉权重小于设定阈值的分支,得到精简后的融合概率后验密度;
29、基于精简后的融合概率后验密度,估计得到目标数量n;
30、选择前n个分支对应的状态作为融合后估计的多目标跟踪结果。
31、第二方面,本发明提供一种分布式多传感器融合跟踪系统,包括:
32、局部滤波模块,用于获取各传感器的原始测量信息,并采用预先建立的基于扩展标签多伯努利滤波器,得到多传感器局部后验概率密度;
33、融合模块,用于确定分布式多传感器融合网络拓扑结构及相对权重矩阵,并基于相对权重矩阵对多传感器局部后验概率密度进行融合,得到融合概率后验密度;
34、跟踪模块,用于根据融合概率后验密度,采用最大似然估计方法,进行目标状态与数量的更新,得到分布式多传感器融合跟踪结果。
35、第三方面,本发明提供一种处理设备,所述处理设备至少包括处理器和存储器,所述存储器上存储有计算机程序,所述处理器运行所述计算机程序时执行以实现所述分布式多传感器融合跟踪方法的步骤。
36、第四方面,本发明提供一种计算机存储介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现所述分布式多传感器融合跟踪方法的步骤。
37、本发明由于采取以上技术方案,其具有以下优点:
38、1、本发明基于扩展标签多伯努利滤波器实现对于多目标状态和数量的同时估计,无需复杂的数据关联算法,提高计算效率,做到实时性多目标跟踪。在此之外,利用引入的扩展标签信息实现轨迹的管理,并且将传感器感知的其他信息,如类别信息、目标尺寸信息作为扩展标签,添加进入lmb的标签空间中,从而在目标轨迹跟踪的同时,获取其他有效信息,满足高级智能驾驶的需求。
39、2、本发明提出一种去中心的分布式多传感器融合通用框架结构,针对车载感知传感器具有的多数量、多类型的特点,提出通用的连接结构与权重分配规则,各传感器对应节点可以并行处理多源感知信息,从而实现多传感器信息融合。
40、3、本发明能够针对不同车载感知传感器的信息特征,包括点云数据和视频数据,在统一的跟踪框架下处理,适应性广,应用性强。
41、因此,本发明可以广泛应用于智能汽车的环境感知领域。
- 还没有人留言评论。精彩留言会获得点赞!