机器人及其控制方法、装置和可读存储介质与流程
本发明涉及控制,具体而言,涉及一种机器人及其控制方法、装置和可读存储介质。
背景技术:
1、在杂乱的环境中用三指灵巧手对未知物体进行抓取,常采用10个维度来表达抓取数据,数据量比较大,在构建数据时需要大量的人工成本。
2、为了降低构建时的数据量,会限制几个维度的数据,上述限制使得抓取姿态出现了局限,抓取的质量比较差。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本发明的第一个方面在于,提供了一种机器人的控制方法。
3、本发明的第二个方面在于,提供了一种机器人的控制装置。
4、本发明的第三个方面在于,提供了另一种机器人的控制装置。
5、本发明的第四个方面在于,提供了一种可读存储介质。
6、本发明的第五个方面在于,提供了一种机器人。
7、本发明的第六个方面在于,提供了另一种机器人。
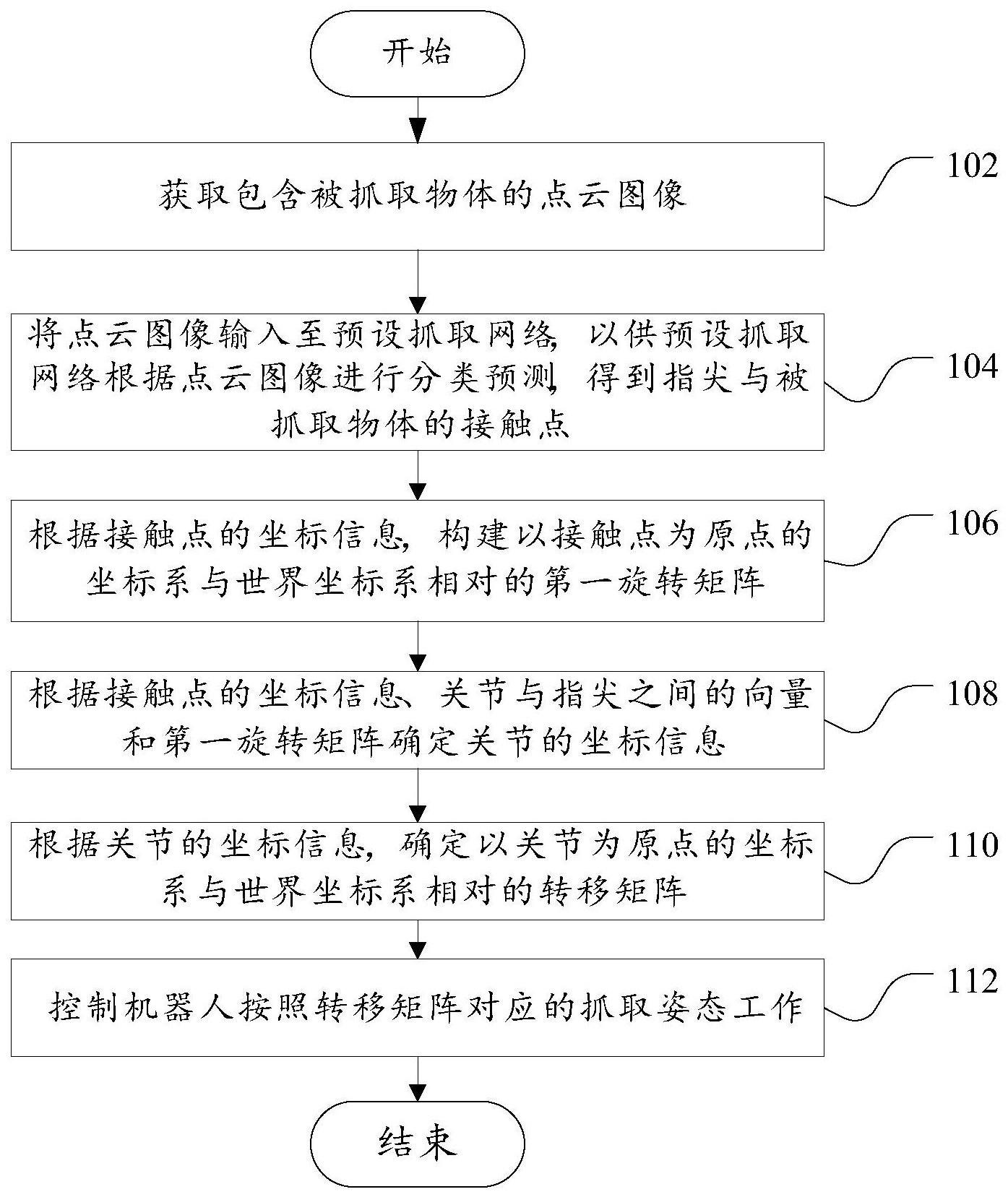
8、有鉴于此,根据本发明的第一个方面,本发明提供了一种机器人的控制方法,机器人包括机械爪,机械爪具有关节和指尖,控制方法包括:获取包含被抓取物体的点云图像;将点云图像输入至预设抓取网络,以供预设抓取网络根据点云图像进行分类预测,得到指尖与被抓取物体的接触点;根据接触点的坐标信息,构建以接触点为原点的坐标系与世界坐标系相对的第一旋转矩阵;根据接触点的坐标信息、关节与指尖之间的向量和第一旋转矩阵确定关节的坐标信息;根据关节的坐标信息,确定以关节为原点的坐标系与世界坐标系相对的转移矩阵;控制机器人按照转移矩阵对应的抓取姿态工作。
9、根据本发明的第二个方面,本发明提供了一种机器人的控制装置,机器人包括机械爪,机械爪具有关节和指尖,控制装置包括:获取单元,用于获取包含被抓取物体的点云图像;预测单元,用于将点云图像输入至预设抓取网络,以供预设抓取网络根据点云图像进行分类预测,得到指尖与被抓取物体的接触点;构建单元,用于根据接触点的坐标信息,构建以接触点为原点的坐标系与世界坐标系相对的第一旋转矩阵;确定单元,用于根据接触点的坐标信息、关节与指尖之间的向量和第一旋转矩阵确定关节的坐标信息;处理单元,用于根据关节的坐标信息,确定以关节为原点的坐标系与世界坐标系相对的转移矩阵;控制单元,用于控制机器人按照转移矩阵对应的抓取姿态工作。
10、根据本发明的第三个方面,本发明提供了另一种机器人的控制装置,包括:控制器和存储器,其中,存储器中存储有程序或指令,控制器在执行存储器中的程序或指令时实现如上述中任一项方法的步骤。
11、根据本发明的第四个方面,本发明提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如上述中任一项方法的步骤。
12、根据本发明的第五个方面,本发明提供了一种机器人,包括:如上述中任一项的机器人的控制装置;和/或如上述可读存储介质。
13、根据本发明的第六个方面,本发明提供了另一种机器人,包括:机械爪,机械爪具有关节和指尖;处理器,处理器实现如上述中任一项方法的步骤。
14、在上述技术方案中,可以利用接触点的坐标信息来实现关节的坐标信息的推导,进而实现抓取姿态的表达,在实现机器人的控制的同时,降低了数据采集的维度,从而降低了需要处理的数据量,降低了机器人控制的人工成本。
15、此外,在上述控制过程中,无需对数据进行限制,避免了对数据的限制造成的机器人抓取质量较差的问题,从而提高了机器人的抓取效率。
16、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种机器人的控制方法,其特征在于,所述机器人包括机械爪,所述机械爪具有关节和指尖,所述控制方法包括:
2.根据权利要求1所述的机器人的控制方法,其特征在于,所述指尖上具有与所述被抓取物体接触的接触面,基于聚类算法对所述接触面进行聚类,得到所述接触点。
3.根据权利要求1所述的机器人的控制方法,其特征在于,所述根据所述关节的坐标信息,确定以所述关节为原点的坐标系与世界坐标系相对的转移矩阵,具体包括:
4.根据权利要求1所述的机器人的控制方法,其特征在于,所述根据所述接触点的坐标信息,构建以所述接触点为原点的坐标系与世界坐标系相对的第一旋转矩阵,具体包括:
5.根据权利要求1至4中任一项所述的机器人的控制方法,其特征在于,还包括:
6.根据权利要求5所述的机器人的控制方法,其特征在于,所述构建训练数据集,具体包括:
7.一种机器人的控制装置,其特征在于,所述机器人包括机械爪,所述机械爪具有关节和指尖,所述控制装置包括:
8.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1至6中任一项所述方法的步骤。
9.一种机器人,其特征在于,包括:
10.一种机器人,其特征在于,包括:
11.根据权利要求10所述的机器人,其特征在于,所述关节为多个,所述指尖为多个,多个所述关节与多个所述指尖一一对应。
12.根据权利要求11所述的机器人,其特征在于,所述指尖的数量为三个。
技术总结
本发明提供了一种机器人及其控制方法、装置和可读存储介质,控制方法包括:获取包含被抓取物体的点云图像;将点云图像输入至预设抓取网络,以供预设抓取网络根据点云图像进行分类预测,得到指尖与被抓取物体的接触点;根据接触点的坐标信息,构建以接触点为原点的坐标系与世界坐标系相对的第一旋转矩阵;根据接触点的坐标信息、关节与指尖之间的向量和第一旋转矩阵确定关节的坐标信息;根据关节的坐标信息,确定以关节为原点的坐标系与世界坐标系相对的转移矩阵;控制机器人按照转移矩阵对应的抓取姿态工作。
技术研发人员:徐志远,魏明泽,黄尧民,车正平,刘宁,张新宇,奉飞飞,唐剑
受保护的技术使用者:美的集团(上海)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!