基于标签时间Petri网的自动制造系统初始资源优化配置方法
本发明涉及工业制造,尤其是涉及基于标签时间petri网的自动制造系统初始资源优化配置方法。
背景技术:
1、现实生活中一个自动制造系统可以看作是若干制造活动的集合,这些制造活动通过资源来实施,最终生产出合格的产品。这些活动(加工工序)包括工件加工、运输和包装等。资源可以是原材料、人和机器等。在自动制造系统的工艺流程中,不同加工工序和资源的关系,包括不同工序间的优先级,甚至是资源充足下工序之间的并行关系,都可以抽象成为离散事件系统(discrete event systems,des)进行研究。作为des的主要建模工具,petri网能准确描述系统中并发、异步、冲突和相互制约关系,被广泛应用于制造系统的故障诊断和状态估计。
2、在实际的自动制造系统中,对于系统初始资源的配置问题往往作为企业节约成本、提高经济效益的主要问题来源。若系统的初始资源分配不合理可能会导致资源利用率低,所以许多学者将初始资源的配置问题抽象为petri网的初始状态估计问题。如徐淑琳等在文献《标注petri网中最小初始标识估计》中,为获得制造系统初始化时资源的最优分配方案,采用标注petri网对系统进行建模,在不可观变迁组成无环网的情况下,基于观察到的标注序列,研究了标注petri网的最小初始标识估计问题。然而,该方法对于不可比较的极小初始标识和路径保存不完整,因此需要进一步优化极小初始标识估计算法。其次,该文献没有考虑时间因素对初始标识估计的影响,严格限制了petri网在实时系统中的应用。对于依赖时间的自动制造系统而言,时间信息对分析系统状态具有重要的作用。因此,采用时间petri网对系统进行建模。
3、由于时间维度的添加,时间petri网系统的状态空间变得无限大,因此francescobasile等人在文献《state estimation and fault diagnosis oflabeled time petrinet systems with unobservable transitions》中,通过构建时间petri网系统的修正状态类图(modified state class graph,mscg)来表征无限的状态空间,并在mscg基础上提出了一种在线求解线性规划问题的状态估计算法。但是在构建mscg时,图形规模随系统的复杂度呈指数型增大,因此,需进一步优化mscg的构建算法。
技术实现思路
1、有鉴如此,为了解决上述问题,本发明在原有极小初始标识估计算法上加以改进,并且在原有构建mscg算法上进一步优化,提出了基于标签时间petri网的自动制造系统初始资源优化配置方法。
2、为实现上述目的,本发明提供了基于标签时间petri网的自动制造系统初始资源优化配置方法,包括以下步骤:
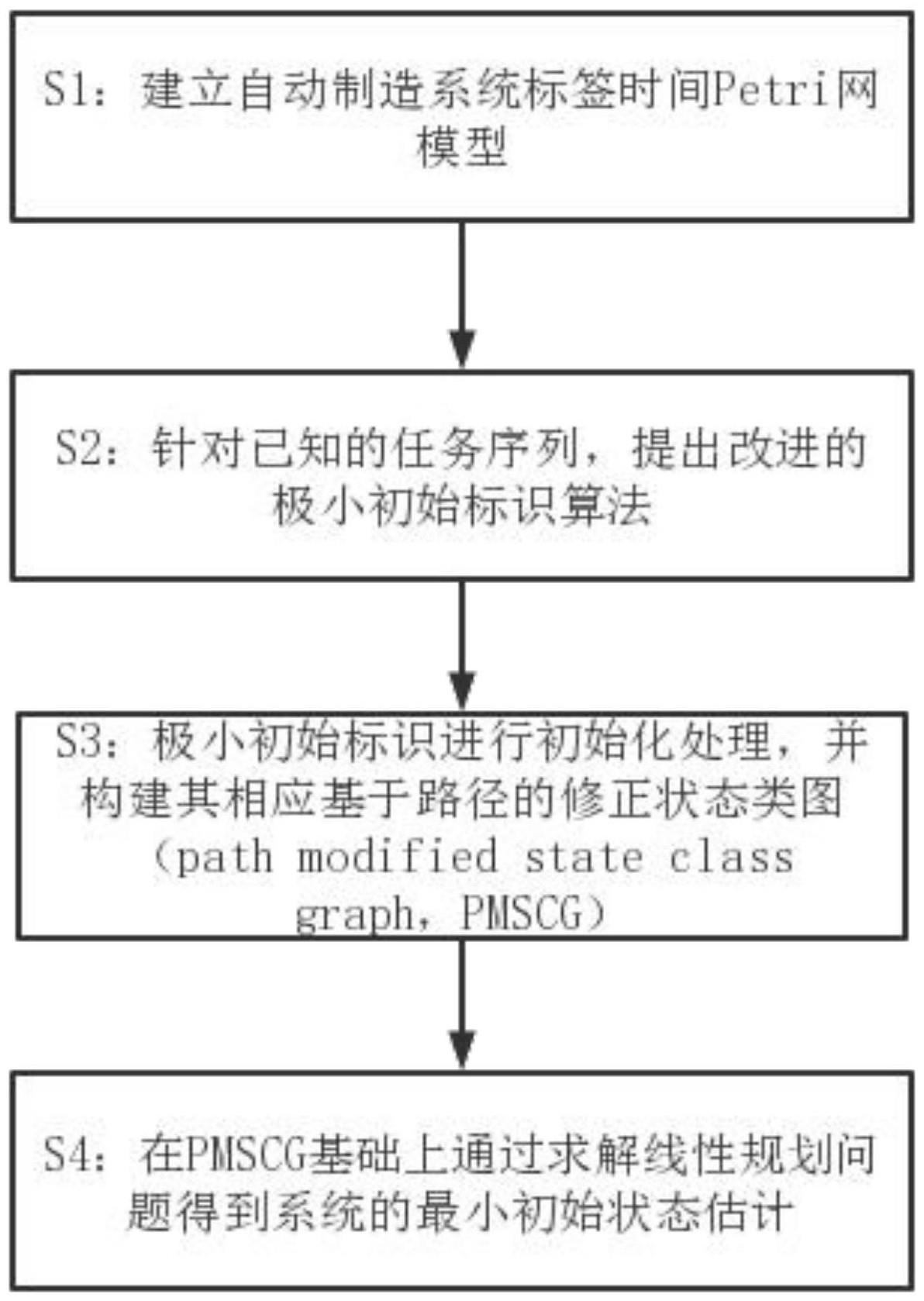
3、s1、建立自动制造系统的标签时间petri网模型;
4、s2、针对已知的任务序列,提出改进的极小初始标识估计算法;
5、s3、极小初始标识进行初始化处理,并构建其相应的基于路径的修正状态类图(path modified state class graph,pmscg);
6、s4、在pmscg基础上通过求解线性规划问题得到系统的最小初始状态估计。
7、进一步的,所述步骤s1包括:利用标签时间petri网对自动制造系统建模,其中,petri网定义为n=(p,t,a,f),库所集p表示制造系统中的资源存放的空间,变迁集t表示制造系统中的各个工序,库所与变迁间的有向弧集a表示系统中资源流动的方向,并用权重函数f:a→{1,2,3,…}表示资源流动的规则。
8、进一步的,petri网的关联矩阵定义为w=w+-w-,w-是前置关联矩阵,w+是后置关联矩阵;petri网的标识m=[m(p1),m(p2),…,m(pn)]表示系统实时的资源配置情况,m(pi)代表库所pi中的托肯(token)数,一个托肯代表一个资源,其中i=1,2,…,n;m0称为petri网的初始标识;此外,在标签时间petri网中,变迁的静态发射区间i(t)=[α,β]表示工序的加工时间,不同的工序可以具有相同的标签即ti∈t,tj∈t,l(ti)=l(tj)=γ,tγ表示与标签γ对应的变迁集合;在初始标识m0下具有使能的变迁集表示为e(m0)={t∈t|m0≥w-(:,t)};同时,用初始状态s0=(m0,θ0)表示初始阶段系统资源的配置情况和相应配置下工序的加工时间,其中m0为系统的初始标识,为在初始标识m0下的使能变迁的静态发射区间集;用时间变迁序列σ=(ti1,ηi1)(ti2,ηi2)…(tik,ηik)表示工序序列和对应的工序完成时间,若不考虑工序的完成时间,利用逻辑变迁序列(简称路径)表示工序序列;用时间标签序列δ=(γ1,η1)(γ2,η2)…(γk,ηk)表示已知的任务序列和相应的观测时间,若不考虑观测时间,利用逻辑标签序列表示已知的任务序列。
9、进一步的,所述步骤s2包括:针对原有极小初始标识估计算法对不可比较的极小初始标识和路径保存不完整的问题,在任务序列已知的情况下,本发明提出一种改进的极小初始标识估计算法,得到与逻辑标签序列一致的极小初始标识集和相应路径。
10、进一步的,所述在改进的极小初始标识估计算法中,对于第j阶段,r表示单个节点,φ(j)表示所有节点的集合,在算法迭代过程中某个节点的信息用一个二元组r=(φ,λini)表示,其中φ是在迭代到第j个标签后不同路径对应的发射向量;λini表示与φ相关的集合。在集合λini中分别表示与φ相关的初始标识及其对应的路径集,得到相同初始标识m0的不同路径构成了路径集
11、具体包括:
12、输入:标签时间petri网和逻辑标签序列
13、s21、初始化集合
14、s22、考虑第j∈{1,2,…,k}阶段的标签γj,并令
15、s23、读取第j-1阶段的集合中的所有节点r∈φ(j-1);对于r中所有初始标识、相应路径以及满足的变迁,计算初始标识m0′=max{m0+w·r.φ,w-(:,t)}-w·r.φ和发射向量并拼接路径#表示在现有路径基础上后续变迁的拼接运算;
16、s24、若φ'没有在集合φ(j)出现过,则创建新的节点并更新集合
17、s25、若φ'在节点r′∈φ(j)出现过,令flag=ture;
18、s251、对于当前集合r′.λi′ni中所有初始标识和相应路径集若令flag=false;若更新路径集合令flag=false;若更新节点
19、s252、若flag=ture,或者与m0′不能比较,则更新节点
20、s26、转到步骤s22考虑下一阶段的标签γj+1,直至逻辑标签序列遍历完成并输出第k阶段集合λini中的元素;
21、输出:第k阶段集合λini中所有极小初始标识和相应路径集。
22、进一步的,所述步骤s3中对极小初始标识进行初始化处理包括:在改进的极小初始标识估计算法得到与逻辑标签序列一致的极小初始标识集基础上,为每个极小初始标识下的使能变迁赋予静态时间区间得到极小初始状态集。具体表现为:通过算法得到的极小初始标识集为初始化处理后的极小初始状态集为
23、进一步的,所述步骤s3中首先对极小初始标识初始化处理包括:在改进的极小初始标识估计算法得到与逻辑标签序列一致的极小初始标识集基础上,为每个极小初始标识下的使能变迁赋予静态时间区间得到极小初始状态集;具体表现为:通过算法得到的极小初始标识集为初始化处理后的极小初始状态集为其次,构建pmscg首先要计算pmsct(pathmodified state class tree),其构造原理为:首先,从初始化处理后的极小初始状态集中选择一个极小初始状态并结合相应路径集,具体表示为其中cq0=(mq0,θq0)是pmsct的根节点,是与根节点相关的路径集合。pmsct始于根节点cq0,通过发射路径集合中任意一条路径的第一个变迁,得到一个路径节点cq1,依次按照顺序发射后面的变迁,直到发射路径中最后一个变迁完成得到路径末端节点cqk;再始于根节点选择另一条路径,循环往复直至中所有路径迭代完成。这样从根节点选择不同的路径便可得到多个分支子树,再合并pmsct中相同的路径节点,最终形成了pmscg。
24、进一步的,所述基于路径的修正状态类图构造算法包括以下步骤:
25、输入:标签时间petri网系统和初始化集合
26、s31、令根节点为cq0=(mq0,θq0),选择任意一条路径
27、s32、对路径中的变迁按顺序进行遍历,若变迁tγi满足则计算mqi=mqi-1+w(:,tγi),并转到下一步骤中;
28、s321、对所有变迁若变迁te满足且mqi-1-w-(:,tγi)≥w-(:,te),则令否则令
29、s322、建立路径节点其中添加从到且标记为的边,其中
30、s33、若步骤1中的路径全部遍历完成,则输出pmsct;否则继续执行s31;
31、s34、合并pmsct中相同的路径节点得到pmscg;
32、输出:pmscg。
33、进一步的,所述步骤s4包括:
34、s41、对极小初始状态集中的每个元素构建其相应的pmscg;
35、s42、根据时间标签序列δ=(γ1,η1)(γ2,η2)…(γk,ηk),通过求解由pmscg的时间约束构建的线性规划问题,求得与时间标签序列一致的极小初始状态集;
36、s43、在与时间标签序列δ相一致的极小初始状态集中找到托肯数最少的最小初始状态。
37、进一步的,所述步骤s42中通过求解由pmscg的时间约束构建的线性规划问题,求得与时间标签序列δ一致的极小初始状态集具体包括:在pmscg中,一个极小初始状态沿着某条路径的节点演化可表示为:
38、
39、因此,判断该极小初始状态是否与时间标签序列一致的线性约束为:
40、
41、以所有发射时间约束之和的最小值为目标函数,并利用lingo软件验证上述线性规划问题是否存在可行解,若极小初始状态对应的路径集中至少有一条路径满足上述线性规划问题的所有约束条件(即存在可行解),则称该极小初始状态与时间标签序列δ相一致,反之不一致;进而,对极小初始状态集中每个元素在pmscg基础上依据不同的路径信息验证相应的线性约束,筛选出与时间标签序列相一致的极小初始状态集。
42、因此,本发明采用上述基于标签时间petri网的自动制造系统初始资源优化配置方法,其技术效果如下:
43、(1)本发明提出的方法给出自动制造系统在初始阶段资源的最优配置方案,在满足生产计划的前提下,较大程度上降低企业的生产成本和能源消耗,有利于企业效益最大化。
44、(2)本发明中改进的极小初始标识估计算法保留了不可比较的极小初始标识和路径,解决了现有算法保存不完整的问题。
45、(3)本发明中改进的极小初始标识估计算法与传统的穷举法相比,本算法通过一个发射向量对应多个不同路径的方式在保证计算准确性的同时,降低了计算复杂度,使其更适用于复杂系统。
46、(4)本发明提出的pmscg构建算法缩减原有mscg的规模,进一步降低了计算代价。
- 还没有人留言评论。精彩留言会获得点赞!