一种基于Grassmann流形子空间嵌入的振动信号域适应诊断方法
本发明涉及故障诊断领域,尤其涉及一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法。
背景技术:
1、电机、轴承等旋转机械广泛应用在工业制造、航空航天、轨道交通、石油化工、汽车制造和风力发电等重要工程领域,在国民经济生产中占有重要地位,研究旋转机械的智能故障诊断方法对于保障设备安全高效运行,避免巨大经济损失和重大安全生产事故具有重要的理论意义和工程价值。
2、近年来,智能故障诊断方法受到了越来越多的研究者的关注。它们在故障诊断过程中利用人工智能技术,实现智能、自动故障检测。基于机器学习的经典故障诊断方法得到了广泛的研究,但这些方法有一定的局限性,阻碍了在实际工业场景中的应用。基于深度学习的故障诊断方法因其较强的自动特征提取能力而受到越来越多的关注和发展,常用的方法有深度自编码器、深度信念网络、卷积神经网络和深度残差网络等。然而,这些方法同样存在一定的局限性:故障诊断模型仍然遵循训练和测试数据相同分布的假设,这与实际工作条件下数据分布不一致相矛盾;由于训练数据不足,导致基于深度学习的模型故障诊断性能明显下降,且往往需要进行高成本、耗时的参数调优。迁移学习作为一种很有前途的技术,已被广泛用于机械跨域故障诊断。基于迁移学习的故障诊断方法已经成功地实现了跨域故障诊断,但存在三个可能降低域适应性能和跨域诊断精度的问题:(1)现有的跨域故障诊断方法大多是在源域和目标域类平衡的条件下进行的(域的数据类别相同),这种数据条件在实际工业场景中往往是不现实的,测试数据(从实际工作场景中收集的目标域)不能与训练数据(源域)具有相同的所有类别。(2)在原始特征空间进行分布对齐时,很难克服特征失真,导致域适应性能差。(3)现有的许多基于迁移学习的域自适应方法的分布对齐优化目标只关注增强跨域特征的可迁移性,也忽略了特征的可辨别性,导致分类性能不佳。
3、针对上述问题,本发明首先提出了一种基于k-means和最大均值差异的特征可迁移性评价方法tfeam,从原始统计特征集中选择可迁移性能好的特征构成领域适应特征子集。针对现有领域自适应方法的三个局限性,提出了一种领域自适应方法,即流形子空间学习嵌入的判别联合分布对齐(djme)。最后,将所提出的tfeam和djme结合,提出一种新的跨域故障诊断框架tfeam-djme。
技术实现思路
1、本发明所要解决的技术问题是为了提高旋转机械智能故障诊断方法在实际工业场景中的准确率、泛化能力和稳定性,本发明提供一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法,实现旋转机械智能故障诊断方案在类不平衡和训练数据条件匮乏条件下保持良好的诊断准确率。
2、本发明为解决上述技术问题采用以下技术方案:
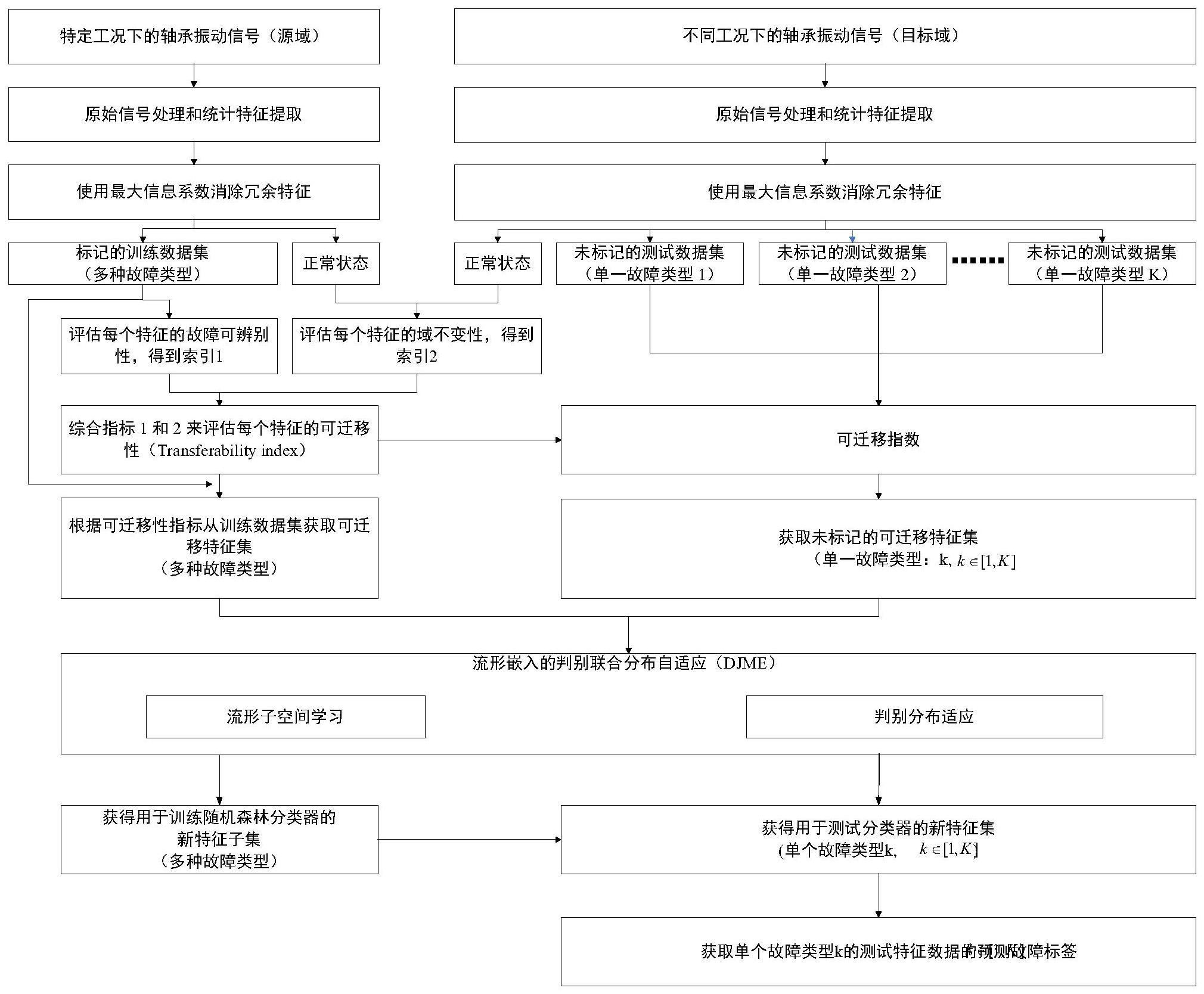
3、一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法,具体包含如下步骤:
4、步骤1,利用双树复小波包变换dtcwpt对原始振动信号进行分解,利用得到的16个终端小波包节点的重构信号提取16个hilbert包络谱hes;计算16个重构信号和16个hes的11个统计参数,生成一个包含352个统计特征的混合域统计特征集,即原始的统计特征集osfs;
5、步骤2,对步骤1构建的原始的统计特征集osfs中的特征利用最大互信息系数mic去除冗余特征,得到新的约简特征集nrf;针对nrf中的每个特征,分别利用k-means和mmd构建可迁移指标ti;通过设置可迁移指标ti阈值,选择具有较强领域适应能力的特征组成领域适应特征子集dafs;
6、步骤3,将步骤2得到的源域的标记dafs作为训练集xs,未标记dafs作为测试集xt,并进行djme处理,在流行子空间上进行跨域特征判别联合分布对齐;
7、步骤4,采用步骤3中得到的源域标记特征集作为随机森林分类器rf的输入,训练跨域故障诊断模型,训练好的rf用于预测目标域未标记特征集的故障标签。
8、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,所述步骤1具体步骤如下:
9、步骤1.1,将来自于特定工况下的原始振动信号样本作为源域,其数据集的样本有标签;步骤1.2,将来自不同工况下的原始振动信号样本作为目标域,其数据集的样本无标签,采用源域标记样本对诊断模型进行训练,并使用训练后的模型对目标域进行故障状态分类。
10、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,在步骤1中,对源域和目标域的振动信号进行dtcwpt分解,分解层数设置为4,获取16个终端小波包节点,同时对底层节点系数进行单支小波包重构得到16个单支重构信号,并获取16个重构信号对应的希尔伯特包络谱hes,分别计算16个重构信号与16个hes的11个统计参数,共生成352个统计特征,构成原始统计特征集osfs。
11、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,在步骤2中,采用mic去除冗余特征,降低计算复杂度;采用k-means和最大均值差异的可迁移特征选取方法tfeam对原始统计特征集的特征进行评价,得到可迁移性选择指标ti评价特征的可迁移性,采用降序排序后的ti序列选择原始统计特征集的迁移性能好的特征构成领域适应特征子集dafs。
12、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,对于步骤1所得到的源域原始统计特征集中的带标签故障特征数据,计算特征之间的互信息系数mic,减少冗余特征,降低计算的复杂度;利用k-means聚类方法量化特征的可辨别性,将调整的rand指数ari作为评价特征辨别性指标fdi;采用mmd测量源域与目标域原始统计特征集中正常状态特征分布差异,并将mmd的值作为评价特征域不变性指标ddi;对于得到的每一特征的fdi与ddi,构建可迁移型选择指标ti;对于来自目标域原始特征集的无标签特征数据,直接用排序后的ti序列进行域不变特征选取。
13、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,tfeam方法的具体步骤如下:
14、步骤2.1,针对步骤1中得到的源域和目标域osfs,计算特征之间的最大互信息系数mic,从而去除冗余特征,得到新的nrf;mic主要使用互信息mi来量化变量之间的相关程度;给定变量a={ai,i=1,2,…,n}和b={bi,i=1,2,…,n},n是样本数;mi的定义如下:
15、
16、其中,a和b分别属于a和b,p(a,b)表示联合概率密度;p(a)和p(b)是边际概率密度;给出一组有限有序对d={(ai,bi),i=1,2,…,n};定义一个划分g,一个大小为x×y的网格,将a的取值范围划分为x段,将b的取值范围划分为y段;在得到的每个网格分区内计算a和b之间的mi,因为同一个网格可以划分多种方式,因此选择不同划分方式下的最大值mi(a,b)作为g的mi值;在最大mi的d下定义g方程为
17、mi*(d,x,y)=maxmi(d∣g) (2)
18、其中,d∣g表示d被g分割;mic的定义如下:
19、
20、其中,b(n)是样本量的函数,设b(n)=n0.6;当mic越高时,a和b之间的相关性越强;任何特征fi和fj之间的相关性表示为mic(fi,fj),mic(fi,fj)的值越大,fi和fi之间的可替代性越大,即冗余度越大;
21、步骤2.2,对于nrf中的每一个特征,通过k-means聚类方法量化特征的可辨别性,调整的rand指数ari作为特征辨别性的量化指标;定义一个特征集有m个特征样本,每个样本包含n种特征;特征集和i-th样本的表示分别是f=[f1,f2,…,fm]和fi={fi1,fi2,…fin},i∈[1,m];第i个样本的第k个特征由fik表示;所有样本的特征用fn=[f1,f2,…fn]表示,所有样本的第k个特征集用fk表示;fk可以定义为:
22、
23、通过k-means算法将fk分类为m聚类分区;计算m个聚类分区的ari来衡量聚类结果的准确性;给定一组n个对象o={o1,o2,…on},令p={p1,p2,…pn}为通过k-means得到的x的类,并且令q={q1,q2,…qn}是真实的类;ari的定义如下:
24、
25、其中,e表示在q和p中均属于同一类的{oi,oj}的数目;f表示在p中不属于同一类的和q中属于同一类的{oi,oj}的数目;g表示在p中属于同一类且在q中不属于同一类{oi,oj}的数目;h表示在q和p中都不属于同一类的{oi,oj}的数目;ari的取值范围是[0,1];当ari的值越高时,聚类性能越好;使用特征的ari值作为fdi,它量化了故障可辨别性;对于n个特征,可以通过执行k-means算法构造一个fdi序列,{fdi(1),fdi(2),…fdi(n)};fdi值越高,特征可辨别性越强;
26、步骤2.3,对于源域和目标域的正常状态特征数据,通过mmd评估同一特征的在不同域的分布差异,mmd的值作为特征域不变性的量化指标;源域和目标域分别表示为ds=(xs,ys)和dt=(xt,yt);mmd的表达式如下:
27、
28、其中,ns和nt分别是源域和目标域中的样本数,h表示再现核希尔伯特空间(rkhs),f(·)是将特征数据映射到rkhs的映射函数;给定一个特定工作条件下的正常状态特征集fns和不同工作条件下的正常状态特征集fnt,两者都包含m个样本,每个样本由n个特征组成;fns和fnt可以表示如下;
29、
30、其中,源域和目标域中m样本的n-th特征分别定义为和计算出fns和fnt之间的mmd;当特征之间的mmd较低时,分布差异较小;使用特征的mmd值作为ddi;对于每个特征,获得包含相应mmd值的ddi序列;
31、步骤2.4,根据从步骤2和步骤3中获得的fdi和ddi,提出了一个新的可迁移性指标ti,用于评估特征的可迁移性;ti的表达式定义为
32、
33、对于k个特征,得到一个包含k个特征对应的ti值的ti序列,{ti(1),ti(2),…,ti(k)};ti值越高,特征的可迁移性就越大;进一步利用ti序列选择可迁移的特征,组成领域适应特征子集dafs,进行后续的域适应。
34、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,在步骤3中,djme有两个基本步骤:流形子空间学习msl和判别式联合分布适应djda;
35、djme的具体步骤如下:
36、步骤3.1,根据步骤2得到的领域适应特征子集dafs,采用测地线流核(gfk),将原始高维特征投影到grassmann流形子空间中,获取高维特征空间的低维域不变性表示;源域子空间向量vs和目标域的子空间向量vt由pca获得,在(d)中被视为两个点;在两点之间构造测地线流φ(t)(0≤t≤1)以完成特征映射;映射后定义流形特征为w,w=φ(t)tx,测地线流核可以描述为两个无限维特征向量和的内积:
37、
38、其中,g∈rk×k是通过奇异值分解得到的半正定矩阵;xi和xj是两个原始的d维特征向量;等式通过将原始特征映射到无限维子空间,确保分类器最大程度地保持跨域分布的一致性;通过流形学习,获得了新的特征数据集zs和zt,它们分别是xs和xt在grassmann流行空间的表示;
39、步骤3.2,采用一种判别式联合分布适应djda同时最小化不同域的同一类特征之间的联合概率分布差异,实现可迁移性,同时最大化不同域的不同类特征之间的联合概率分布差异,实现可辨别性;并与传统的mmd自适应方法进行了比较减小源域和目标域之间的分布差异。
40、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,步骤3.2具体实现如下:
41、步骤3.21,在传统的mmd定义的基础上,引入了联合概率差异(jpd);给定c={1,2,…,c}和分别是xs和xt的标签集,c是标签的总数;让p(x|y)和p(y)分别是类条件概率和先验概率;根据贝叶斯定律,ds和dt之间的jpd表达式如下:
42、
43、在式中,msame_class测量源域和目标域中相同类特征数据的jpd,mdifferent_classes测量两个域中不同类特征数据的jpd;将jpd的表达方式和传统的mmd定义相比较,虽然理论上是等价的,但是直接定义的jpd和传统的mmd定义的区别在于后者是基于边际概率和后验概率的乘积;式是直接从特征数据中计算出来的,没有近似,因此,它可以将类可辨别性整合到分布差异中;
44、步骤3.22,基于msame_class和mdifferent_classes,具有分辨型的jpd定义如下:
45、ddjpd(ds,dt)=msame_class-μmdiffernent_class (11)
46、其中,μ是一个权衡参数,大于0,msame_class和mdifferent_classes分别用于衡量同一类的可迁移性和不同类在域之间的可辨别性;对于msame_class,计算过程如下:
47、式可以进一步表示为:
48、
49、其中,根据经验:
50、
51、
52、同样地,
53、
54、
55、其中是从源域训练的分类器获得的目标域的伪标签;进一步变换为:
56、
57、步骤3.23,令源域和目标域的one-hot编码标签矩阵分别为且ys,1∈r1×c,
58、方程可进一步表示为
59、
60、其中,和表达式如下:
61、
62、mdifferent_classes的计算步骤如下:
63、
64、类似地,基于与msame_class相同的推导,可以进一步表示为:
65、
66、设
67、
68、其中,ys(:,c)是ys的第c列,ys(:,1)*(c-1)重复ys(:,c)c-1次来构造在中的矩阵,由的第1到第c(不包括第1列)列构成;fs是从已知标签中得到的,是由迭代更新的伪标签获得;因此,a的表达式可以简化为
69、
70、其中,和的表达式如下:
71、
72、步骤3.24,基于等式和,具有主成分保留约束和正则化项的djda优化目标表示为
73、
74、其中h=i-1/n表示中心矩阵,n=ns+nt和x=[xs,xt],是正则化项,并且应用正则化参数λ以确保优化问题得到明确定义;根据约束优化理论,我们将φ=diag(φ1,φ2,…,φk)∈rk×k定义为拉格朗日乘数,优化目标的拉格朗日函数可以推导出为
75、l=tr(at(x(umin-μumax)xt+λi)a)+tr((i-atxhxta)φ) (26)
76、其中,
77、
78、
79、设置方程可以转换为广义特征分解问题:
80、(x(umin-μumax)xt+λi)a=xhxtaφ (29)
81、步骤3.25,,寻找最优域适应矩阵a被简化为求解式的p-最小特征向量,实现用atxs来训练一个适用于atxt的分类器。
82、作为本发明一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法的进一步优选方案,在步骤4中,构建基于tfeam和djme的跨域旋转机械故障诊断模型,具体步骤如下:将步骤3中的源域标记特征集作为随机森林分类器的输入,训练分类器f;采用训练后的分类器f预测目标域标记特征集,输出跨域诊断结果,即得到目标域的标签信息
83、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
84、本发明基于流行子空间学习和判别联合分布对齐算法相结合的思想,本发明提出了流行嵌入的判别联合分布对齐,将原始特征空间中的高维特征转换到低维流行空间,降低特征失真,并且在低维空间执行判别联合分布对齐,同时增加特征的域不变性和可辨别性;为了进一步提高域自适应性能,在进行域自适应之前,一个关键步骤是选择具有更好的故障可分辨性和域不变性的可转移特征,本发明提出了基于k-means和最大均值差异的迁移特征选择方法,用于量化特征的域不变性能和可辨别性;综上,我们提出了一种基于grassmann流形子空间嵌入的振动信号域适应诊断方法,在提升诊断模型准确率的同时,提高模型的泛化能力,让模型部署到实际工业场景中诊断准确率不会出现较大波动。
- 还没有人留言评论。精彩留言会获得点赞!