一种汽车ADAS标定设备空间自校准方法及系统与流程
本技术涉及车辆辅助系统的领域,尤其是涉及一种汽车adas标定设备空间自校准方法及系统。
背景技术:
1、先进驾驶辅助系统(advanced driver assistance system),简称adas,是利用安装于车上的各式各样的传感器, 在第一时间收集车内外的环境数据, 进行静、动态物体的辨识、侦测与追踪等技术上的处理, 从而能够让驾驶者在最快的时间察觉可能发生的危险, 以引起注意和提高安全性的主动安全技术。
2、车辆在出厂前需要对车辆的先进驾驶辅助系统进行检测标定,从而保证车辆在出厂后adas能够发挥自身的功能,帮助驾驶员进行安全驾驶。如图2所示,一种汽车adas标定设备,包含了acc标靶移动机构、bsd吸波墙、对中台、bsd标靶移动机构、电控系统以及两侧的bsd侧吸波墙。车辆在检测时会从一端移动至对中台上进行检测,然后从另一端移开。
3、针对上述中的相关技术,对中台的下方由于需要安装一些仪器故下方一般为内部中空的状态,而在中空空间的上方会设置一条引导轨道,以方便车辆进行定位,而对中台在长时间使用的过程中会发生形变或者偏移,使得引导轨道偏移,容易造成车辆标定不准确的情况,尚有改进的空间。
技术实现思路
1、为了改善对中台在长时间使用的过程中会发生形变或者偏移,使得引导轨道偏移,容易造成车辆标定不准确的情况的问题,本技术提供一种汽车adas标定设备空间自校准方法、系统及存储介质。
2、第一方面,本技术提供一种汽车adas标定设备空间自校准方法,采用如下的技术方案:
3、一种汽车adas标定设备空间自校准方法,包括:
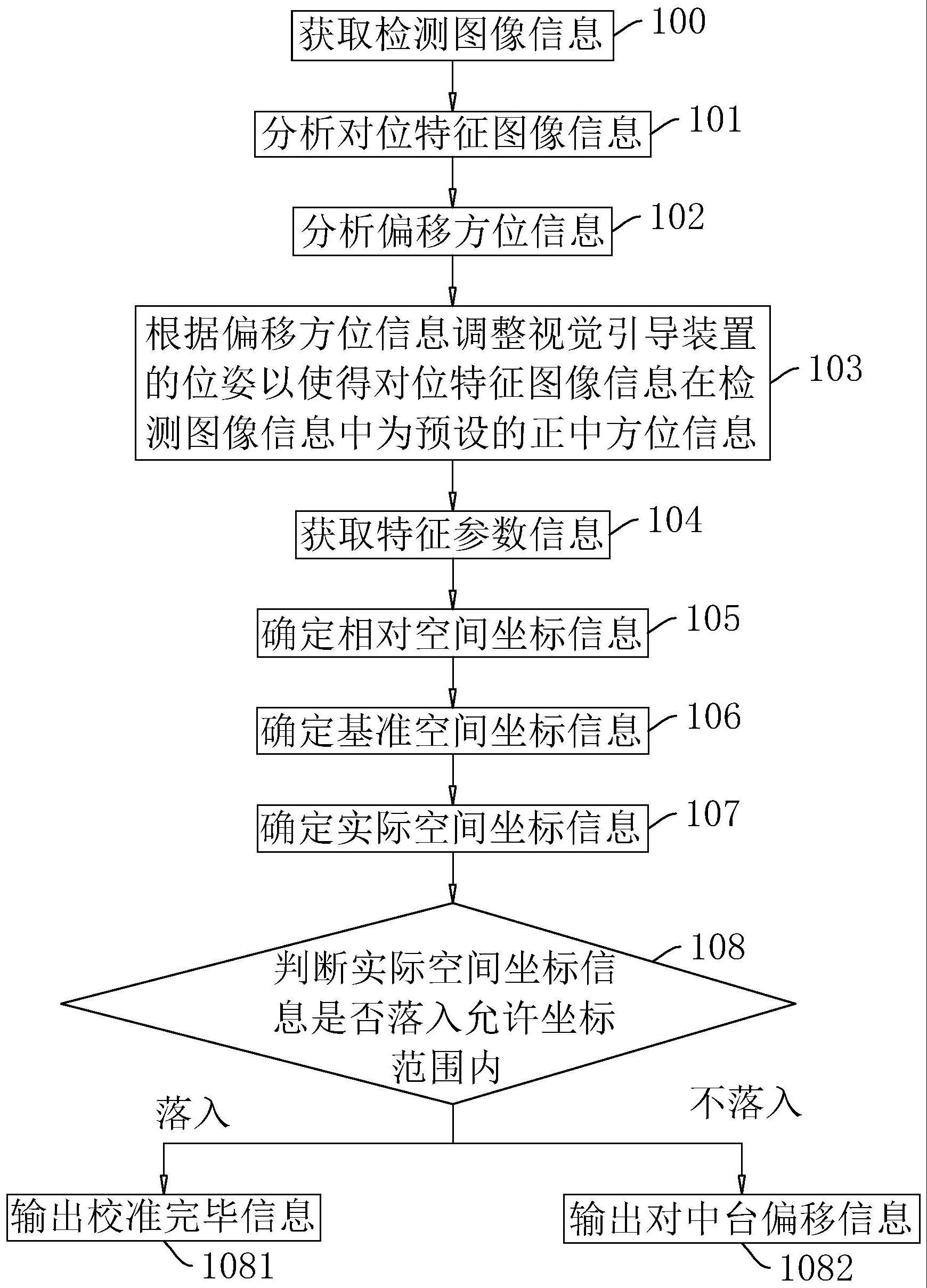
4、载有待检测标靶的标定车移动至对中台上后获取待检测标靶的检测图像信息;
5、分析检测图像信息中的对位特征图像信息;
6、分析对位特征图像信息在检测图像信息内的方位,将该方位定义为偏移方位信息;
7、根据偏移方位信息调整视觉引导装置的位姿以使得对位特征图像信息在检测图像信息中为预设的正中方位信息,将视觉引导装置调整后的位姿定义为调整位姿信息;
8、获取调整位姿后的调整图像信息并分析调整图像信息中的特征参数信息;
9、根据特征参数信息确定待检测标靶相对于空间仪的相对空间坐标信息;
10、根据调整位姿信息确定空间仪中视觉引导装置的基准空间坐标信息;
11、根据基准空间坐标信息和相对空间坐标信息确定实际空间坐标信息;
12、判断实际空间坐标信息是否落入预设的允许坐标范围内;
13、若落入,则输出校准完毕信息;
14、若不落入,则输出对中台偏移信息。
15、通过采用上述技术方案,通过标靶小车进入对中台上模拟对中台的方位,然后根据空间仪上的视觉引导装置以及测量装置对标靶进行测量分析以确定对中台的实际位置,从而确定对中台的偏移量,实时检测对中台的位置,防止因对中台偏移而adas的测量数据不准确的情况发生,提高了汽车adas标定设备空间的准确性。
16、可选的,还包括空间仪的自我校核的方法,该方法包括:
17、将空间仪复位后获取校核标靶的第一校核图像信息;
18、分析第一校核图像信息中的第一校核特征参数信息;
19、根据第一校核特征参数信息确定空间仪相对于校核标靶的第一校核空间坐标信息;
20、判断第一校核空间坐标信息是否落入预设的目标坐标范围信息内;
21、若不落入,则输出视觉校核失败信息;
22、若落入,则输出视觉校核成功信息。
23、通过采用上述技术方案,通过固定在标定设备空间内的设备,从而对空间仪进行自我校核,提高了空间仪校核的准确性。
24、可选的,所述校核标靶的数量为三个且不同时位于一条直线上。
25、通过采用上述技术方案,三个不同的点构成一条三角形,而三角形的设置,使得检测上具有方位感,更加立体,各个方位进行检测且互相之间制约和互补,提高空间仪自我检测的稳定性。
26、可选的,空间仪的自我校核的方法进一步包括:
27、根据预设的校核位姿信息对空间仪进行调整后获取第二校核图像信息并分析第二校核特征参数信息;
28、根据校核位姿信息确定空间仪的校核基准空间坐标信息;
29、根据第二校核特征参数信息确定空间仪的第二校核空间坐标信息;
30、根据校核基准空间坐标信息和第二校核空间坐标信息确定实际校核空间坐标信息;
31、判断第二校核方位信息是否落入目标坐标范围信息内;
32、若落入,则输出位姿校核完毕信息;
33、若不落入,则输出位姿校核失败信息。
34、通过采用上述技术方案,通过将空间仪移动一个固定设置的位姿从而确定空间仪上自身移动的位姿是否准确,进一步提高了空间仪自校准的准确性。
35、可选的,判断实际空间坐标信息是否落入允许坐标范围内的方法包括:
36、获取待检测标靶的当前检测次数信息;
37、判断当前检测次数信息是否为1;
38、若为1,则获取检测图像信息并分析判断实际空间坐标信息是否落入允许坐标范围内;
39、于落入允许坐标范围内后将检测图像信息存储于预设的图像数据库中并将检测图像信息定义为历史图像信息,形成历史图像信息和当前检测次数信息的映射关系;
40、若不为1,则根据当前检测次数信息确定相邻已检测次数信息;
41、根据相邻已检测次数信息从图像数据库中查找对应的历史图像信息,将该历史图像信息定义为最新历史图像信息;
42、判断检测图像信息是否和最新历史图像信息一致;
43、若一致,则输出校准完毕信息;
44、若不一致,则输出对中台偏移信息。
45、通过采用上述技术方案,通过确定当前检测的图像和历史记录的准确的图像之间的差异从而快速确定没有偏移的情况,从而减少计算以及调节的工作量,提高了校核系统的校核效率。
46、可选的,获取检测图像信息的方法包括:
47、根据预设的底框色彩信息和检测图像信息进行匹配分析以确定底框区域信息;
48、根据底框区域信息的外框坐标和预设的底框尺寸信息进行分析以确定空间比例信息和空间转化角度信息;
49、将底框区域信息内检测图像信息的所有特征按照空间比例信息和空间转化角度信息进行转化以得到实际特征信息;
50、判断实际特征信息是否和预设的标准特征信息一致;
51、若一致,则直接输出检测图像信息;
52、若不一致,则将底框区域信息划分成若干个网格并将实际特征信息和标准特征信息分别按照网格区域进行划分以得到实际网格特征信息和标准网格特征信息;
53、将实际网格特征信息和标准网格特征信息一一进行匹配以确定匹配成功数量信息;
54、判断匹配成功数量信息是否大于预设的成功临界值;
55、若大于,则以标准网格特征信息更新匹配不成功的实际网格特征信息重新形成检测图像信息并输出;
56、若小于,则不输出检测图像信息。
57、通过采用上述技术方案,通过将图像分割成若干个网格,然后将每个网格进行一一比对匹配从而确定是否存在较多数的网格是匹配成功的,防止局部因为污染而导致无法整体识别出是否是特征块的情况,提高了标靶识别的准确性。
58、可选的,还包括若匹配成功数量信息为0时输出检测图像信息的方法,该方法包括:
59、根据检测图像信息和预设的色差特征方位信息进行匹配分析以确定检测图像信息中的色差特征区域信息;
60、根据预设的光线数据库中所存储的明暗信息和色差特征区域信息中的灰度值进行匹配分析以确定色差特征区域信息中的灰度值所对应的明暗值,将该明暗值定义为当前明暗信息;
61、根据预设的标准光亮信息和当前明暗信息计算出明暗差值信息;
62、根据预设的照明数据库中所存储的照明操作信息和明暗差值信息进行匹配分析以确定明暗差值信息所对应的照明操作,将该照明操作定义为当前照明操作信息;
63、控制灯光按照当前照明操作信息进行操作以调节整个标定空间的照明情况。
64、通过采用上述技术方案,由于标定空间一般设置于室内且四周均具有封闭的遮挡板,故通过确定整个图像中色差区域的位置处的色差,从而确定其因为外界照明程度导致的明暗程度的变化情况,从而将整体光亮调节到需要的程度,提高了特征块识别的准确性。
65、可选的,控制灯光按照当前照明操作信息进行操作以调节整个标定空间的照明情况的方法包括:
66、根据预设的朝向数据库中所存储的光照范围信息和空间转化角度信息进行匹配分析以确定空间转化角度信息所对应的光照范围,将该光照范围定义为当前光照范围信息;
67、根据当前光照范围信息、实际空间坐标信息和预设的灯光布置信息确定影响灯光位置信息;
68、根据允许坐标范围信息和影响灯光位置信息确定影响区域信息;
69、获取影响区域信息内的物体信息;
70、判断物体信息是否存在;
71、若存在,则移动对应的物体信息至影响区域信息外;
72、若不存在,则控制灯光按照当前照明操作信息进行操作以调节整个标定空间的照明情况。
73、通过采用上述技术方案,通过确定光照途径上是否存在物体从而确定是否光照其实是存在的,从而避免即使光照再次加强也无法恢复到需要的照明程度的情况,提高了光照调节的效率。
74、可选的,还包括触发获取待检测标靶的检测图像信息的动作的方法,该方法包括:
75、获取载有待检测标靶的标定车移动至对中台上时触发的当前到位信息和当前到位信息的到位数量信息;
76、判断当前到位信息是否存在且到位数量信息为四个;
77、若当前到位信息存在且到位数量信息为四个,则获取待检测标靶的检测图像信息;
78、若当前到位信息不存在或者到位数量信息小于四个,则不触发获取待检测标靶的检测图像信息的动作。
79、通过采用上述技术方案,通过确定标定车是否对位准确,从而排除标定车还没有到位就触发检测的可能性,提高了汽车adas标定设备空间的准确性。
80、第二方面,本技术提供一种汽车adas标定设备空间自校准系统,采用如下的技术方案:
81、一种汽车adas标定设备空间自校准系统,包括:
82、获取模块,用于获取检测图像信息、调整图像信息、第一校核图像信息、第二校核图像信息、当前检测次数信息、物体信息、当前到位信息和到位数量信息;
83、存储器,用于存储如权利要求1至9中任一项的汽车adas标定设备空间自校准方法的程序;
84、处理器,存储器中的程序能够被处理器加载执行且实现如权利要求1至9中任一项的汽车adas标定设备空间自校准方法。
85、通过采用上述技术方案,通过标靶小车进入对中台上模拟对中台的方位,然后根据空间仪上的视觉引导装置以及测量装置对标靶进行测量分析以确定对中台的实际位置,从而确定对中台的偏移量,实时检测对中台的位置,防止因对中台偏移而adas的测量数据不准确的情况发生,提高了汽车adas标定设备空间的准确性。
86、综上所述,本技术包括以下至少有益技术效果:
87、1.通过空间仪上的视觉引导装置以及测量装置对标靶进行测量分析以确定对中台的实际位置,防止因对中台偏移而adas的测量数据不准确的情况发生,提高了汽车adas标定设备空间的准确性;
88、2.通过固定在标定设备空间内的设备,从而对空间仪进行自我校核,提高了空间仪校核的准确性;
89、3.通过确定当前检测的图像和历史记录的准确的图像之间的差异从而快速确定没有偏移的情况,从而减少计算以及调节的工作量,提高了校核系统的校核效率。
- 还没有人留言评论。精彩留言会获得点赞!