定位方法、装置、设备、可读存储介质及程序产品与流程
本技术属于激光雷达定位,尤其涉及一种定位方法、装置、设备、可读存储介质及程序产品。
背景技术:
1、随着智能化的不断发展,为了满足智能化需求,车辆或智能家居产品等运动对象均需要对其进行定位。目前可以采用局部扫描点云的方式进行定位,然而对于一些复杂场景,容易出现点云高度相似或者点云大面积缺失等情况导致定位不准确、鲁棒性较低的问题。
技术实现思路
1、本技术实施例提供一种定位方法、装置、设备、可读存储介质及程序产品,能够实现高鲁棒性和高精度的定位功能。
2、第一方面,本技术实施例提供一种定位方法,方法包括:
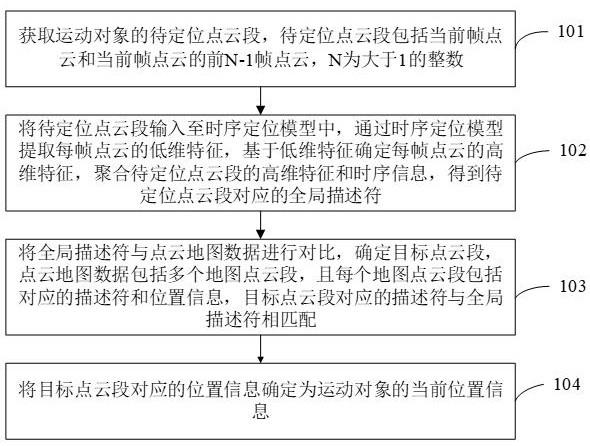
3、获取运动对象的待定位点云段,待定位点云段包括当前帧点云和当前帧点云的前n-1帧点云,n为大于1的整数;
4、将待定位点云段输入至时序定位模型中,通过时序定位模型提取每帧点云的低维特征,基于低维特征确定每帧点云的高维特征,聚合待定位点云段的高维特征和时序信息,得到待定位点云段对应的全局描述符;
5、将全局描述符与点云地图数据进行对比,确定目标点云段,点云地图数据包括多个地图点云段,且每个地图点云段包括对应的描述符和位置信息,目标点云段对应的描述符与全局描述符相匹配;
6、将目标点云段对应的位置信息确定为运动对象的当前位置信息。
7、在一些实施例中,时序定位模型包括第一特征转换模块、第二特征转换模块和时序模块;
8、将待定位点云段输入至时序定位模型中,通过时序定位模型提取每帧点云的低维特征,基于低维特征确定每帧点云的高维特征,聚合待定位点云段的高维特征和时序信息,得到待定位点云段对应的全局描述符,包括:
9、将待定位点云段输入至第一特征转换模块中,通过第一特征转换模块得到的结果与每帧点云进行向量相乘,得到包含每帧点云的低维特征的第一潜在向量;
10、将每帧点云的第一潜在向量输入至第二特征转换模块中,通过第二特征转换模块得到的结果与第一潜在向量相乘,得到包含每帧点云的高维特征的第二潜在向量;
11、将待定位点云段的第二潜在向量输入至时序模块中,通过时序模块聚合待定位点云段的高维特征和时序信息,得到待定位点云段对应的全局描述符。
12、在一些实施例中,将待定位点云段输入至时序定位模型中,通过时序定位模型提取每帧点云的低维特征,基于低维特征确定每帧点云的高维特征,聚合待定位点云段的高维特征和时序信息,得到待定位点云段对应的全局描述符之前,方法还包括:
13、获取训练样本集,训练样本集包括点云查询数据和点云地图数据;
14、对训练样本集进行预处理,得到多个查询点云段和多个地图点云段,每个查询点云段包括点云查询数据中的n帧点云,每个地图点云段包括点云地图数据中的n帧点云;
15、针对每个查询点云段,从多个地图点云段中标注查询点云段的正样本点云段和负样本点云段;
16、根据正样本点云段和负样本点云段,训练时序定位模型。
17、在一些实施例中,针对每个查询点云段,从多个地图点云段中标注查询点云段的正样本点云段和负样本点云段,包括:
18、针对每个查询点云段,确定多个地图点云段与查询点云段之间的距离;
19、将距离小于第一阈值的地图点云段标注为查询点云段的正样本点云段;
20、将距离大于第二阈值的地图点云段标注为查询点云段的负样本点云段。
21、在一些实施例中,对训练样本集进行预处理,得到多个查询点云段和多个地图点云段,包括:
22、对训练样本集中的每帧点云进行裁剪处理,得到坐标值处于预设范围内的第一点云;
23、对第一点云进行归一化处理,得到归一化点云数据;
24、针对归一化点云数据中的每帧归一化点云,标记并存储归一化点云的前n-1帧归一化点云,得到多个查询点云段和多个地图点云段。
25、在一些实施例中,对第一点云进行归一化处理,得到归一化点云数据,包括:
26、对第一点云进行下采样处理,得到第二点云;
27、对第二点云进行归一化处理,得到归一化点云数据。
28、在一些实施例中,根据正样本点云段和负样本点云段,训练时序定位模型,包括:
29、根据正样本点云段和负样本点云段,通过三元组损失函数,训练时序定位模型。
30、在一些实施例中,根据正样本点云段和负样本点云段,训练时序定位模型,包括:
31、获取验证样本集;
32、根据正样本点云段和负样本点云段进行模型训练,得到初始模型;
33、根据验证样本集对初始模型进行模型验证,得到验证结果;
34、在验证结果指示合格的情况下,将初始模型确定为时序定位模型并保存。
35、在一些实施例中,将初始模型确定为训练好的时序定位模型并保存之后,方法还包括:
36、获取测试样本集;
37、根据测试样本集对时序定位模型进行模型测试。
38、第二方面,本技术实施例提供了一种定位装置,装置包括:
39、第一获取模块,用于获取运动对象的待定位点云段,待定位点云段包括当前帧点云和当前帧点云的前n-1帧点云,n为大于1的整数;
40、输入模块,用于将待定位点云段输入至时序定位模型中,通过时序定位模型提取每帧点云的低维特征,基于低维特征确定每帧点云的高维特征,聚合待定位点云段的高维特征和时序信息,得到待定位点云段对应的全局描述符;
41、第一确定模块,用于将全局描述符与点云地图数据进行对比,确定目标点云段,点云地图数据包括多个地图点云段,且每个地图点云段包括对应的描述符和位置信息,目标点云段对应的描述符与全局描述符相匹配;
42、第二确定模块,用于将目标点云段对应的位置信息确定为运动对象的当前位置信息。
43、第三方面,本技术实施例提供了一种定位设备,设备包括:
44、处理器以及存储有程序或指令的存储器;
45、所述处理器执行所述程序或指令时实现上述的方法。
46、第四方面,本技术实施例提供了一种机器可读存储介质,所述机器可读存储介质上存储有程序或指令,所述程序或指令被处理器执行时实现上述的方法。
47、第五方面,本技术实施例提供了一种计算机程序产品,所述计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行上述方法。
48、本技术实施例的定位方法、装置、设备、可读存储介质及程序产品,能够获取运动对象的待定位点云段,待定位点云段包括当前帧点云和当前帧点云的前n-1帧点云,n为大于1的整数;将待定位点云段输入至时序定位模型中,通过时序定位模型提取每帧点云的低维特征,基于低维特征确定每帧点云的高维特征,聚合待定位点云段的高维特征和时序信息,得到待定位点云段对应的全局描述符;将全局描述符与点云地图数据进行对比,确定目标点云段,点云地图数据包括多个地图点云段,且每个地图点云段包括对应的描述符和位置信息,目标点云段对应的描述符与全局描述符相匹配;将目标点云段对应的位置信息确定为运动对象的当前位置信息。
49、这样,可以将当前帧点云以及其前序帧点云输入至时序定位模型中,通过提取每帧点云的低维特征克服点云的无序性,并深层次挖掘点云的高维特征,从而得到聚合了高维特征和时序信息的全局描述符,利用全局描述符去匹配定位,如此,在面对点云重复率高场景或点云大面积缺失场景,也可以借助连续点云帧进行精准定位,有效保证了定位的高鲁棒性和高精度。
- 还没有人留言评论。精彩留言会获得点赞!