一种水下航行器壁面脉动压力及振动响应预示方法及系统
本发明属于水下航行器振动特性研究,涉及一种水下航行器壁面脉动压力及振动响应预示方法及系统。
背景技术:
1、水下航行器在航行过程中,周边湍流边界层内的扰动、壁面上的脉动压力会产生流噪声。湍流边界层内的速度扰动相当于四极子声源,壁面脉动压力相当于偶极子声源,因为在低马赫数的情况下,四极子产生的噪声很小,可以忽略不计,所以壁面上的脉动压力形成的偶极子声源是流噪声的主要成分。水下航行器受到流噪声激励作用时,其壳体受迫振动,产生噪声,影响水下航行器的探测能力与隐身性两大重要性能指标。噪声分为自噪声和辐射噪声,自噪声指水下航行器噪声中传递到换能器的噪声,自噪声过大,会降低探测系统灵敏度,减小探测作用距离,甚至导致探测系统错误动作,自噪声降低4db,主动声探测作用距离约增加19.1%,被动声探测作用距离约增加34.3%;辐射噪声指水下航行器噪声中辐射到周围水环境的噪声。辐射噪声直接关系到水下航行器的隐身性,辐射噪声过大,会暴露水下航行器的位置,辐射噪声降低5db,无人水中兵器的命中率约提高25%。因此,仿真求解水下航行器壁面脉动压力及水下航行器在该壁面脉动压力作用下的振动响应具有重要的工程意义。
2、现有技术中,目前市面上的cfd软件多使用有限体积法进行流体计算,而结构分析、声场分析等多使用有限元法进行计算,当面对多物理场耦合问题时,往往需要多个软件联合仿真,操作较为繁琐。水下航行器在流体激励下的响应问题是典型的多物理场耦合问题,涉及流场、声场、结构等物理场的耦合。
技术实现思路
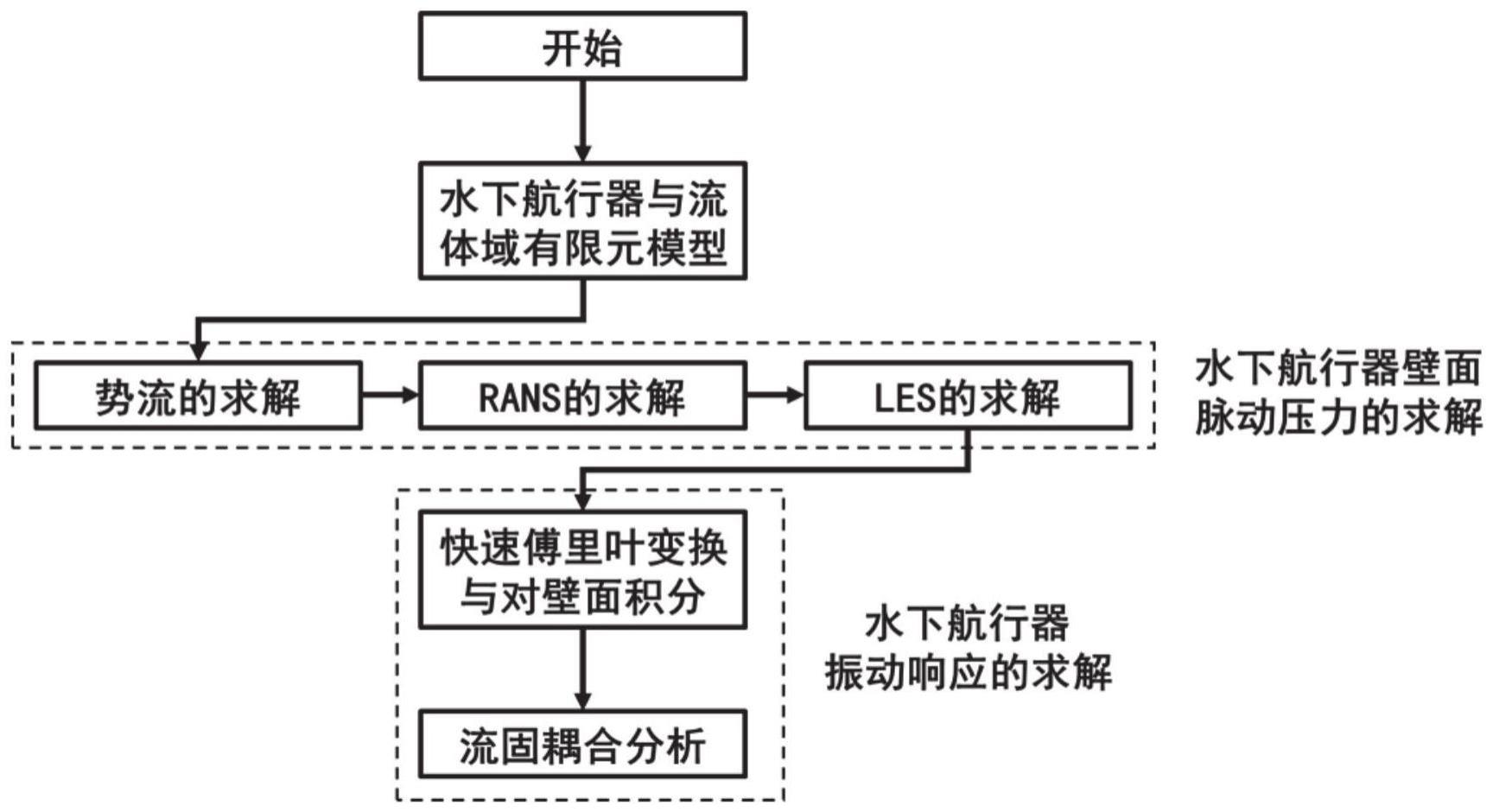
1、针对现有技术中存在的问题,本发明提出了一种水下航行器壁面脉动压力及振动响应预示方法及系统,在流场的cfd计算和结构的振动响应计算中均使用有限元法进行仿真。通过les求解流体作用在水下航行器壁面的瞬态脉动压力,通过快速傅里叶变换将时域的脉动压力激励转换到频域上,施加在水下航行器结构上,求解水下航行器在该脉动压力激励下的振动响应,从而实现流固耦合分析。本方法更易于流场与结构的流固耦合计算,也更利于多物理场耦合仿真,避免了使用多个仿真软件进行联合仿真,提高了仿真的效率。
2、本发明是通过以下技术方案来实现:
3、一种水下航行器壁面脉动压力及振动响应预示方法,包括以下步骤,
4、s1、建立水下航行器和流体域的三维模型,得到水下航行器和流体域的有限元模型;
5、s2、根据水下航行器和流体域的有限元模型,对无旋情况下的势流求解,得到势流解;将势流解作为rans求解的初始值,当涡量不为0时、对纳维-斯托克斯方程中的物理量进行时间平均情况下的雷诺平均纳维-斯托克斯方程求解,得到rans解;
6、s3、根据水下航行器和流体域的有限元模型和所述的rans解,对湍流中的大尺度涡进行直接模拟的大涡模拟求解,得到les解;对les解进行快速傅里叶变换,得到频域下流体对水下航行器的激励;
7、s4、根据所述的频域下流体对水下航行器的激励和水下航行器受力,对水下航行器进行流固耦合分析,得到水下航行器的位移、速度和加速度的振动响应。
8、优选的,s1中所述的建立水下航行器和流体域的三维模型,具体过程为:
9、根据水下航行器航行时的实际工况赋予其材料属性,确定流体域流体的基本属性,从而建立水下航行器和流体域的三维模型,对三维模型进行网格划分,得到水下航行器和流体域的有限元模型。
10、优选的,所述材料属性包括水下航行器材料的密度、阻尼、杨氏模量和泊松比,以及流体域流体的密度和动力黏度;
11、确定流体域流体的基本属性具体为:计算流体的雷诺数和马赫数,通过雷诺数确定流体的流动状态为斯托克斯流、层流或湍流,通过马赫数确定流体的流动状态为不可压缩流动或可压缩流动;
12、优选的,对三维模型进行网格划分时至少划分2次,其中一次用于势流和rans求解,另一次用于les求解。
13、优选的,s2中无旋情况下的势流求解,具体过程为:
14、设置势流求解的边界条件,根据实际问题和计算机的内存大小选择合适的求解器,设置求解器的相对容差,对有限元模型进行稳态分析,计算得到势流解;
15、其中,设置势流求解的边界条件具体为:
16、设置流体域的上底为流体入口,设置入口的通量为流体流速;设置流体域的下底为流体出口,设置出口的狄利克雷边界条件为0;在水下航行器的壁面设置为无滑移壁,即壁上质点的速度为0;流体域的壁面设置为滑移壁,即壁上质点的法向速度为0。
17、优选的,s2中所述的rans求解,具体过程为:
18、选择合适的rans湍流模型,设置rans求解的边界条件,使用势流解作为rans求解的初始值,对有限元模型进行稳态分析,得到rans解;
19、其中,设置rans求解的边界条件具体为:
20、设置流体域的流体入口的法向流入速度为流体流速,设置流体域的流体出口的静压为0;在水下航行器的壁面设置为无滑移壁,流体域的壁面设置为滑移壁。
21、优选的,s3中所述的les求解,具体过程为:
22、设置les求解的边界条件,使用rans解作为les求解的初始值,对有限元模型进行瞬态分析,得到les解;其中,les求解的边界条件与rans求解的边界条件相同;
23、优选的,s4中所述的快速傅里叶变换,具体过程为:
24、设置快速傅里叶变换的启动时间、结束时间和输出频率,将时域下流体对水下航行器的激励转换到频域下,得到转换后频域下的流体对水下航行器的激励,对水下航行器壁面进行面积分,得到水下航行器受力。
25、优选的,s5中所述的流固耦合分析,具体过程为:
26、将频域下流体对水下航行器的激励施加在水下航行器结构上,根据实际工况对水下航行器施加约束,求解水下航行器的位移、速度和加速度振动响应。
27、一种水下航行器壁面脉动压力及振动响应预示系统,包括,
28、模型建立模块,用于建立水下航行器和流体域的三维模型,得到水下航行器和流体域的有限元模型;
29、计算模块,用于求解势流解,rans解和les解;
30、分析模块,用于对水下航行器进行流固耦合分析,得到水下航行器的位移、速度和加速度的振动响应。
31、与现有技术相比,本发明具有以下有益的技术效果:
32、本发明提供一种水下航行器壁面脉动压力及振动响应的预示方法及系统,具体涉及一种基于les的处于湍流中的水下航行器受到流体施加的壁面脉动压力的求解方法,并求解水下航行器在该壁面脉动压力激励下振动响应的方法。通过求解势流解,将求得的势流解作为rans求解的初始值,再求解rans解,并将求得的rans解作为les求解的初始值,求得les解,以达到加速迭代,减小计算时间和计算规模的目的;通过les求解流体作用在水下航行器壁面的瞬态脉动压力,通过快速傅里叶变换将时域的脉动压力激励转换到频域上,施加在水下航行器结构上,从而实现流固耦合分析,求得水下航行器在该激励下的位移、速度和加速度等振动响应。本发明在求解过程中在流场的cfd计算和结构的振动响应计算中均使用有限元法进行仿真求解,而不涉及cfd计算中常用的有限体积法,从而更方便地进行多物理场耦合计算,更易于流场与结构的流固耦合计算,对于水下航行器等流场、结构、声场等多物理量耦合的情况仿真效率更高,避免了使用多个仿真软件联合仿真的繁琐,提高了仿真的效率
33、进一步,本发明在求解过程中都运用有限元法进行求解,在流场计算中,通过先计算势流解和rans解,将rans解作为les解的初始值,减小了les求解的计算成本。
- 还没有人留言评论。精彩留言会获得点赞!