三维数字化模型的相机阵列目标识别方法及系统
本发明涉及光学探测,尤其涉及一种三维数字化模型的相机阵列目标识别方法及系统。
背景技术:
1、随着人工智能等技术的发展,对目标的感知、识别和测量在交通、安防、医疗、建筑等诸多应用领域的应用越来越频繁。
2、当前对目标的识别涉及多种技术手段,比如光学成像、激光探测、振动分析等,这些手段一般是基于待测目标本身的特性,来实现待测目标与场景和其它目标的区分,难以实现对待测目标三维形貌的同步识别。
3、因此,亟需一种对目标三维形貌同步识别的技术方案。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种三维数字化模型的相机阵列目标识别方法及系统,用以解决现有技术中难以实现对待测目标三维形貌的同步识别的问题。
2、一方面,本发明实施例提供了一种基于三维数字化模型的相机阵列目标识别方法,所述识别方法包括:
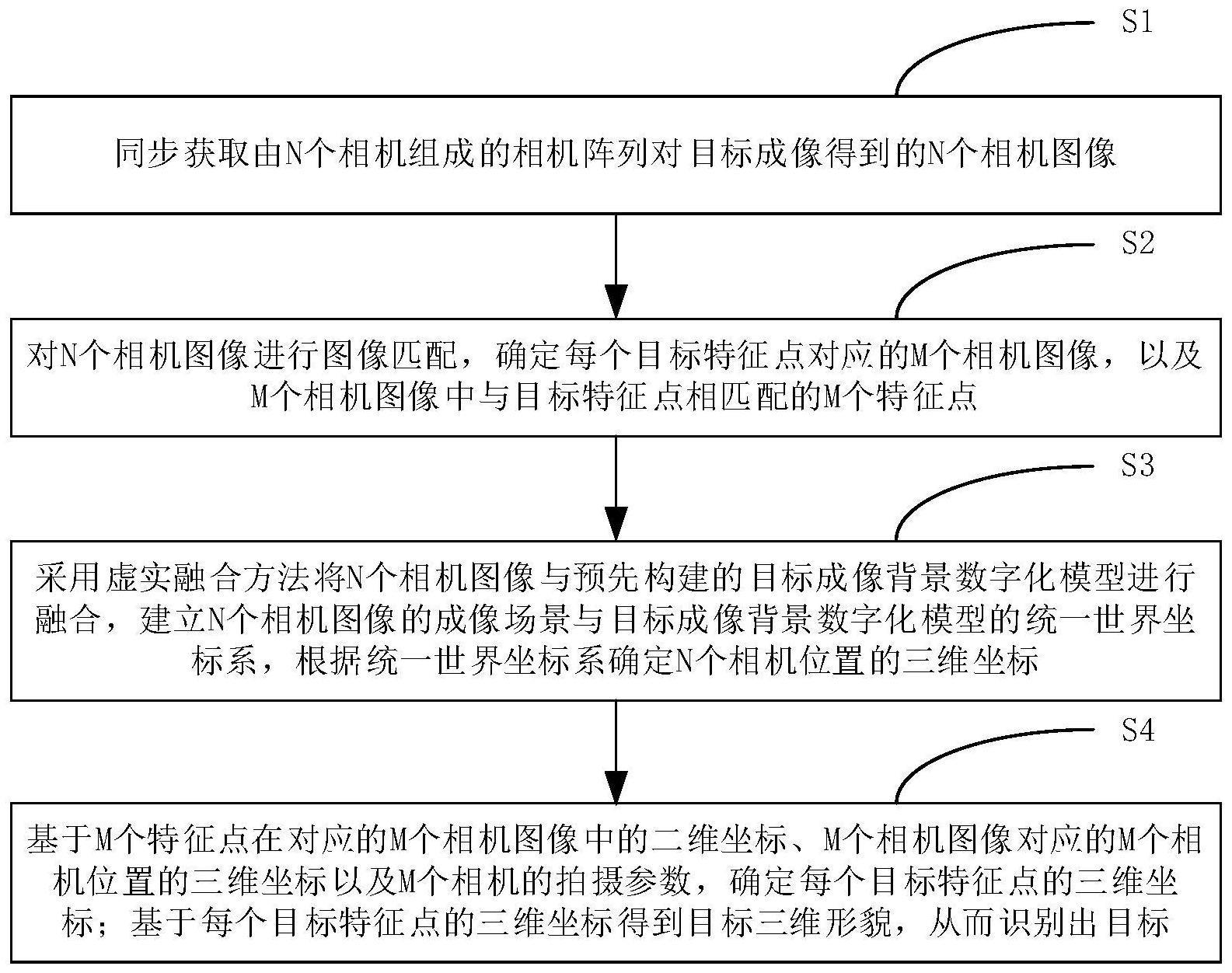
3、同步获取由n个相机组成的相机阵列对目标成像得到的n个相机图像;
4、对n个相机图像进行图像匹配,确定每个目标特征点对应的m个相机图像,以及m个相机图像中与目标特征点相匹配的m个特征点;
5、采用虚实融合方法将n个相机图像与预先构建的目标成像背景数字化模型进行融合,建立n个相机图像的成像场景与目标成像背景数字化模型的统一世界坐标系,根据统一世界坐标系确定n个相机位置的三维坐标;
6、基于m个特征点在对应的m个相机图像中的二维坐标、m个相机图像对应的m个相机位置的三维坐标以及m个相机的拍摄参数,确定每个目标特征点的三维坐标;基于每个目标特征点的三维坐标得到目标三维形貌,从而识别出目标。
7、基于上述方法的进一步改进,所述基于m个特征点在对应的m个相机图像中的二维坐标、m个相机图像对应的m个相机位置的三维坐标以及m个相机的拍摄参数,确定每个目标特征点的三维坐标,包括:
8、根据m个相机的拍摄参数和m个相机图像对应的m个相机位置的三维坐标,对m个特征点在对应的m个相机图像中的二维坐标进行坐标转换,得到m个特征点的三维坐标;
9、根据m个特征点的三维坐标和m个相机图像对应的m个相机位置的三维坐标确定每个目标特征点的三维坐标。
10、基于上述方法的进一步改进,所述根据m个特征点的三维坐标和m个相机图像对应的m个相机位置的三维坐标确定每个目标特征点的三维坐标,包括:
11、以m个特征点的三维坐标为端点,以m个相机图像对应的m个相机位置的三维坐标为方向,确定m个特征点对应的m条射线;
12、根据m个特征点对应的m条射线,确定每个目标特征点的三维坐标。
13、基于上述方法的进一步改进,所述根据m个特征点对应的m条射线,确定每个目标特征点的三维坐标,包括:
14、从m条射线中任取两条射线作为一个射线组合;
15、遍历m(m-1)/2种射线组合,基于每一种射线组合,获取两条射线的交点三维坐标或者最短距离的中点三维坐标,得到m(m-1)/2个预选三维坐标;
16、对m(m-1)/2个预选三维坐标求取平均值,将平均值作为每个目标特征点的三维坐标。
17、基于上述方法的进一步改进,所述识别方法还包括:
18、在对n个相机图像进行图像匹配时,获取并且存储每个目标特征点对应的颜色信息。
19、基于上述方法的进一步改进,所述识别方法还包括:
20、将每个目标特征点对应的颜色信息与每个目标特征点的三维坐标进行融合,得到带有色彩的目标三维形貌。
21、基于上述方法的进一步改进,所述对n个相机图像进行图像匹配,确定每个目标特征点对应的m个相机图像,以及m个相机图像中与目标特征点相匹配的m个特征点,包括:
22、从n个相机图像中任取两个相机图像作为一个相机组合;遍历n(n-1)/2种相机组合,基于每一种组合,采用预设匹配算法对两个相机图像匹配,获取两个相机图像匹配成功的特征点,将n(n-1)/2种相机组合中两个相机图像匹配成功的全部特征点作为目标特征点;
23、对于每一个目标特征点,将含有与该目标特征点相匹配的特征点的相机图像作为该目标特征点对应的相机图像,从而得到每个目标特征点对应的m个相机图像与每个目标特征点相匹配的m个特征点。
24、基于上述方法的进一步改进,预设匹配算法为sift匹配算法、surf匹配算法、模板匹配算法或superglue匹配算法。
25、另一方面,本发明实施例提供了一种基于三维数字化模型的相机阵列目标识别系统,所述识别系统包括:
26、相机阵列,包括n个相机,用于同步采集目标图像;
27、交换机,与相机阵列连接,用于将相机阵列发送的目标图像转化为单路网络信号并传输给计算机设备;
28、计算机设备,用于读取单路网络信号,并从中取出相机阵列的所有相机同步采集的图像,基于所有相机同步采集的图像进行如下处理实现目标识别:
29、对n个相机图像进行图像匹配,确定每个目标特征点对应的m个相机图像,以及m个相机图像中与目标特征点相匹配的m个特征点;
30、采用虚实融合方法将n个相机图像与预先构建的目标成像背景数字化模型进行融合,建立n个相机图像的场景与目标成像背景数字化模型的统一世界坐标系,根据统一世界坐标系确定n个相机图像对应的n个相机位置的三维坐标;
31、基于m个特征点在对应的m个相机图像中的二维坐标、m个相机图像对应的m个相机位置的三维坐标以及m个相机的拍摄参数,确定每个目标特征点的三维坐标;基于每个目标特征点的三维坐标得到目标三维形貌,从而识别出目标。
32、基于上述系统的进一步改进,所述基于m个特征点在对应的m个相机图像中的二维坐标、m个相机图像对应的m个相机位置的三维坐标以及m个相机的拍摄参数,确定每个目标特征点的三维坐标,包括:
33、根据m个相机的拍摄参数和m个相机图像对应的m个相机位置的三维坐标,对m个特征点在对应的m个相机图像中的二维坐标进行坐标转换,得到m个特征点的三维坐标;
34、根据m个特征点的三维坐标和m个相机图像对应的m个相机位置的三维坐标确定每个目标特征点的三维坐标。
35、与现有技术相比,本发明至少可实现如下有益效果之一:
36、1、本发明通过n个相机组成的相机阵列对目标成像,结合目标成像背景数字化模型,能够快速的得到目标三维形貌,进而实现对目标三维形貌的同步识别。
37、2、本发明通过同一目标特征点在不同相机对应的多个特征点,根据不同相机在统一世界坐标系中的三维坐标以及多个特征点在不同相机的二维坐标,确定目标的每个目标特征点在统一世界坐标系中的三维坐标,实现对目标特征点的定位。
38、3、本发明通过在对相机图像进行图像匹配时,获取并且存储每个目标特征点对应的颜色信息,将每个目标特征点对应的颜色信息与每个目标特征点的三维坐标进行融合,能够得到带有色彩的目标三维形貌。
39、4、本发明采用相机阵列结合数字化模型,建立了实时场景与数字化模型之间统一的世界坐标系,可以获取实时场景中任意位置的世界坐标、三维形貌和目标的三维形貌。数字化模型精度可以达到厘米级,建模范围可以达到公里级。采用相机阵列的测量保证了测量的准确度,不会因为单个传感器的测量偏差影响整个测量结果。通过统一的世界坐标系,获取实时场景的三维信息,对实时目标进行快速三维建模,时效性快、精度高。
40、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!