一种基于激光视觉的正六边形孔特征的提取方法和系统与流程
本发明属于商用车车身件非接触式测量,特别涉及一种基于激光视觉的正六边形孔特征的提取方法和系统。
背景技术:
1、在汽车飞机零件的加工过程中,由于现场环境、加工精度、人工误差等因素导致生产加工出来的零件尺寸存在偏差。及时的检测出存在缺陷的零件对整体生产有十分重要发意义,能够利用一些工具及算法来代替人工检测来提高检测的精度及效率,获取并记录误差数据能够保证整体质量。
2、在汽车钣金制造中,六边型特征孔虽然不是常见孔类特征但也是非常重要的孔类特征,其中一种用法就是用于塑料卡扣的安装,不光能起到限位的作用,还能起到限向的作用。因此对六边形孔特征实现高精度快速检测对生产加工装配过程有着重要意义。目前对于六边形孔特征提取的方法采用图像方式测量时主要通过边缘提取来实现特征提取,但该方式由于外界干扰会产生大量噪声影响测量精度。在现有技术中提出的六边形检测方法,采用二维图像检测方法检测六角螺栓,通过hough变换原理件六边形检测分成直线和圆以及线端长度和直线夹角的计算,该方法能够有效的检测六边形特征。但尽在图像域进行检测精度不够高。所述现有技术在生产加工过程中,测量精度要求高、现场环境复杂、干扰因素多,现有的二维测量方式效果不理想。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种基于激光视觉的正六边形孔特征的提取方法和系统。能够利用激光视觉传感器检测加工零件上的六边形孔特征,节约劳动力,且提高检测效率。
2、为实现上述目的,本发明采用以下技术方案:
3、一种基于激光视觉的正六边形孔特征的提取方法,包括以下步骤:
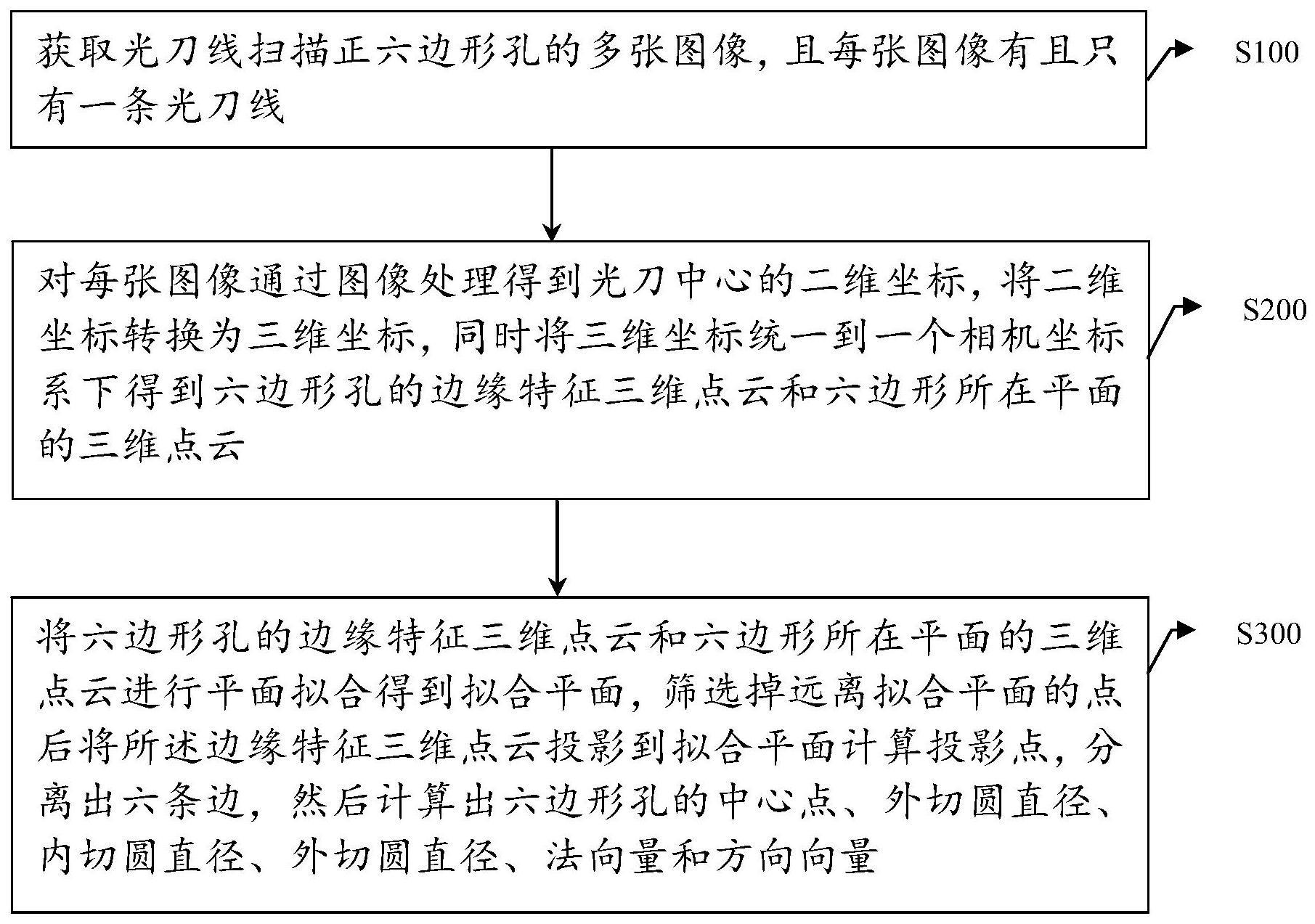
4、获取光刀线扫描正六边形孔的多张图像,且每张图像有且只有一条光刀线;
5、对每张图像通过图像处理得到光刀中心的二维坐标,将所述二维坐标转换为三维坐标,同时将所述三维坐标统一到一个相机坐标系下得到六边形孔的边缘特征三维点云和六边形所在平面的三维点云;
6、将所述六边形孔的边缘特征三维点云和六边形所在平面的三维点云进行平面拟合得到拟合平面,筛选掉远离拟合平面的点后将所述边缘特征三维点云投影到拟合平面计算投影点,分离出六条边,然后计算出六边形孔的中心点、外切圆直径、内切圆直径、外切圆直径、法向量和方向向量。
7、进一步的,所述获取光刀线扫描正六边形孔的多张图像的过程包括:
8、采用摆动式线激光传感器扫描被测六边形孔,按照摆动的角度均匀通过图像采集设备进行图像拍摄,且每张图像有且只有一条光刀线。
9、进一步的,所述图像处理的过程包括:
10、选择待处理图像中第一目标区域,然后对选择的第一目标区域进行预处理;
11、在选择的第一目标区域内寻找六边形孔轮廓,通过每个轮廓外接矩形在图像的位置选出上下两个最长的轮廓;
12、通过外接矩形区域形成的第二目标区域在原图中挑选与同样的第二目标区域范围进行光刀提取得到光刀中心的二维亚像素坐标。
13、进一步的,所述预处理的过程包括:
14、首先利用高斯滤波算法对第一目标区域进行线性平滑滤波;
15、在线性平滑滤波之后,进行二值化处理;
16、在二值化处理之后,采用形态学运算中的开运算,对像素高于阈值的区域进行腐蚀操作找到局部最小值。
17、进一步的,将所述六边形孔的边缘特征三维点云和六边形所在平面的三维点云进行平面拟合得到拟合平面,筛选掉远离拟合平面的点过程包括:
18、将所述六边形孔的边缘特征三维点云和六边形所在平面的三维点云利用svd分解法原理进行平面拟合得到拟合平面;
19、计算平面拟合误差的均值作为筛选离面点的标准值;
20、循环计算每个点到所述拟合平面的距离,并与标准值进行比较,筛选掉远离平面的点。
21、进一步的,将所述边缘特征三维点云投影到拟合平面计算投影点的过程包括:将所述边缘特征三维点云投影到拟合平面,计算每个六边形特征点到拟合平面的距离根据平面法向量和距离计算每个特征点在拟合平面上的投影。
22、进一步的,所述分离出六条边的过程包括:
23、将六边形分成两部分,每个部分均包括三条边;从第四个点开始遍历所有特征点,第四个点向前取三个点作为第一集合,第四个点向后取三个点作为第二集合;第一集合和第二集合分别进行直线拟合;
24、计算两条直线的夹角,如果夹角不超过角度偏差阈值,则当前点位于直线部分,否则为拐点区域的备选点;
25、每个拐点备选区域进行二次寻找拐点,每次选择两个点构成一条直线。向前和向后同时处理画出六条边上的点云。
26、进一步的,在分离出六条边之后,进行六条边求交点得到六个角点,六个角点进行外接圆拟合和六条边求内切圆直径。
27、进一步的,所述正六边形内切圆直径=外接圆直径×cos30°。
28、本发明还提出了一种基于激光视觉的正六边形孔特征的提取系统,包括获取模块、图像处理模块和拟合计算模块;
29、所述获取模块用于获取光刀线扫描正六边形孔的多张图像,且每张图像有且只有一条光刀线;
30、所述图像处理模块用于对每张图像通过图像处理得到光刀中心的二维坐标,将所述二维坐标转换为三维坐标,同时将所述三维坐标统一到一个相机坐标系下得到六边形孔的边缘特征三维点云和六边形所在平面的三维点云;
31、所述拟合计算模块用于将所述六边形孔的边缘特征三维点云和六边形所在平面的三维点云进行平面拟合得到拟合平面,筛选掉远离拟合平面的点后将所述边缘特征三维点云投影到拟合平面计算投影点,分离出六条边,然后计算出六边形孔的中心点、外切圆直径、内切圆直径、外切圆直径、法向量和方向向量。
32、
技术实现要素:
中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
33、本发明提出了一种基于激光视觉的正六边形孔特征的提取方法和系统,该方法包括以下步骤:获取光刀线扫描正六边形孔的多张图像,且每张图像有且只有一条光刀线;对每张图像通过图像处理得到光刀中心的二维坐标,将所述二维坐标转换为三维坐标,同时将所述三维坐标统一到一个相机坐标系下得到六边形孔的边缘特征三维点云和六边形所在平面的三维点云;将所述六边形孔的边缘特征三维点云和六边形所在平面的三维点云进行平面拟合得到拟合平面,筛选掉远离拟合平面的点后将所述边缘特征三维点云投影到拟合平面计算投影点,分离出六条边,然后计算出六边形孔的中心点、外切圆直径、内切圆直径、外切圆直径、法向量和方向向量。基于一种基于激光视觉的正六边形孔特征的提取方法,还提出了一种基于激光视觉的正六边形孔特征的提取系统。本发明借助传感器采集待处理数据,通过图像部分及点云部分算法对数据进行处理,处理后得可以计算一个正六边形孔的参数包括中心点坐标、外接圆直径、内切圆直径、法向量信息,计算结果可以帮助现场工人来评价加工是否合理,用于生产加工的指导。
- 还没有人留言评论。精彩留言会获得点赞!