道路信息的采集方法、装置、系统、电子设备及存储介质与流程
本技术涉及高精地图,尤其涉及道路信息的采集方法、装置、系统、电子设备及存储介质。
背景技术:
1、在自动驾驶领域中,l3级别自动驾驶车辆的功能实现需要使用到高精地图,高精地图是一种具备高分辨率的数字化地图,而由于自动驾驶车辆对高精地图的依赖性较强,因此需要经常对高精地图进行更新,这就涉及到对道路信息的采集。
2、相关技术中,需要使用专用的采集车辆进行高精地图的道路信息的采集,不仅成本高,而且采用单个专用采集车辆进行道路信息的采集也会导致信息采集的速度慢的问题,降低高精地图的更新效率。
3、可以看出,相关技术中,在进行道路信息的采集过程中,存在成本高、采集信息速度慢等的技术问题,导致降低了高精地图的更新效率。
技术实现思路
1、为克服相关技术中存在的问题,本技术提供道路信息的采集方法、装置、系统、电子设备及存储介质,以降低道路信息的采集成本、提高采集速度,从而提高高精地图的更新效率。
2、本技术第一方面提供道路信息的采集方法,应用于车机端,包括:
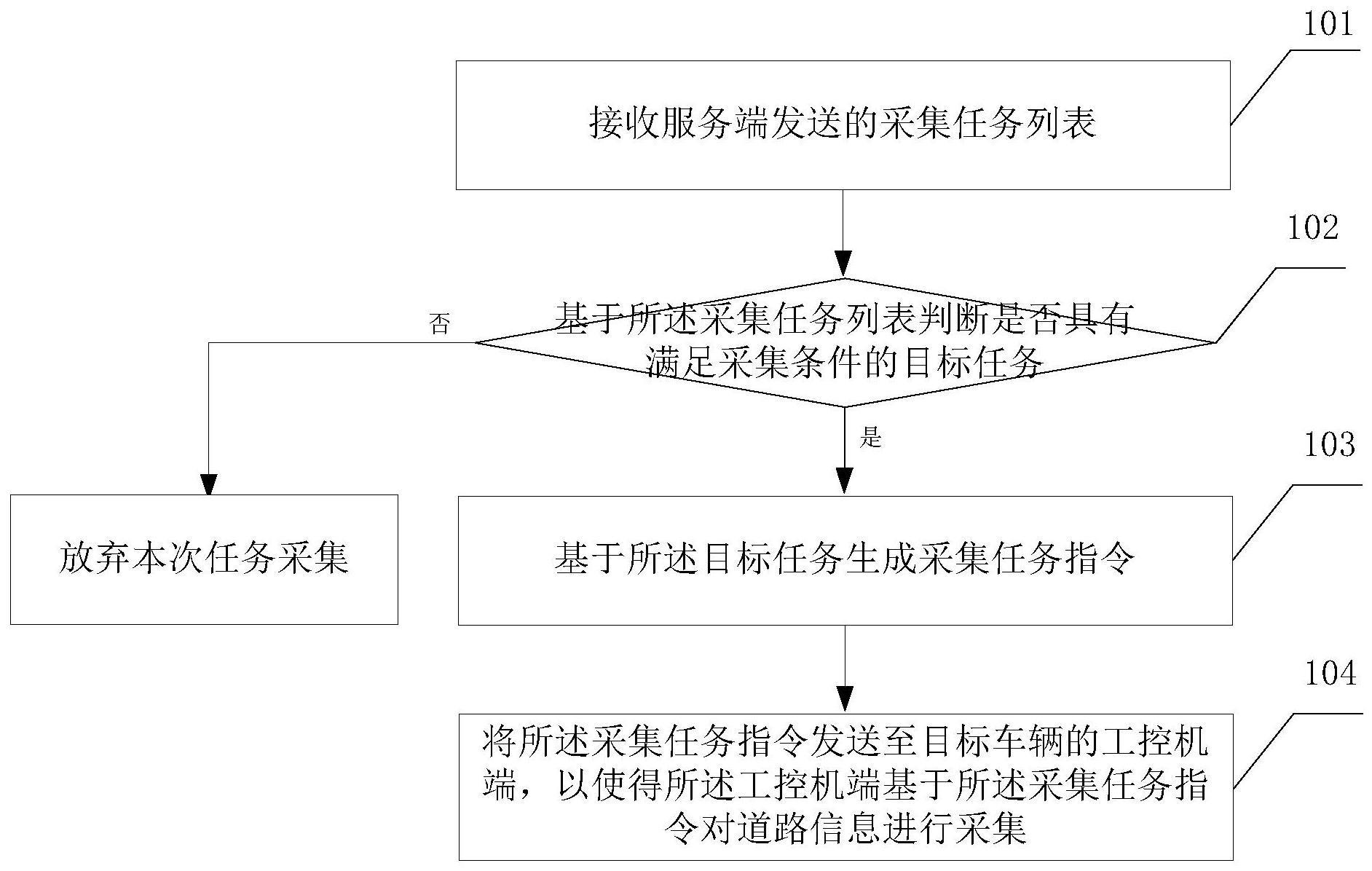
3、接收服务端发送的采集任务列表;
4、基于所述采集任务列表判断是否具有满足采集条件的目标任务,若是,基于所述目标任务生成采集任务指令;
5、将所述采集任务指令发送至目标车辆的工控机端,以使得所述工控机端基于所述采集任务指令对道路信息进行采集。
6、可选地,还包括:
7、每隔预设时间间隔向所述服务端发送当前位置信息;
8、相应的,所述接收服务端发送的采集任务列表包括:
9、接收服务端发送的与所述当前位置信息匹配的采集任务列表。
10、可选地,所述基于所述采集任务列表判断是否具有满足采集条件的目标任务,包括:
11、基于所述采集任务列表判断是否具有当前所处位置在任务区域内的目标任务。
12、可选地,若具有所述当前所处位置在所述任务区域内的目标任务,所述基于所述采集任务列表判断是否具有满足采集条件的目标任务,还包括:
13、判断所述当前所处位置与所述目标任务的任务区域的起点之间的距离是否小于任务阈值。
14、可选地,在所述当前所处位置与所述任务区域的起点之间的距离小于所述任务阈值的情况下,生成采集任务指令之前,还包括:
15、判断所述目标任务的任务区域是否包含高度数据,若否,进入所述生成采集任务指令的步骤;
16、若是,在所述任务区域中确定与所述当前所处位置距离最近的目标任务位置;
17、判断所述当前所处位置的高度与所述目标任务位置的高度是否小于高度阈值;
18、若是,进入所述生成采集任务指令的步骤。
19、可选地,还包括:
20、实时监测当前所处位置是否在所述目标任务的任务区域内,若否,向所述工控机端发送结束采集任务指令,使得所述工控机端基于所述结束采集任务指令结束道路信息的采集;
21、接收所述工控机端采集的所述道路信息以及记录的行驶轨迹,并将所述道路信息和所述行驶轨迹发送至服务端。
22、本技术第二方面提供道路信息的采集装置,应用于车机端,包括:
23、接收列表单元,用于接收服务端发送的采集任务列表;
24、判断条件单元,用于基于所述采集任务列表判断是否具有满足采集条件的目标任务;
25、生成指令单元,用于在确定具有满足所述采集条件的目标任务下,基于所述目标任务生成采集任务指令;
26、发送指令单元,用于将所述采集任务指令发送至目标车辆的工控机端,以使得所述工控机端基于所述采集任务指令对道路信息进行采集。
27、可选地,还包括:
28、发送位置单元,用于每隔预设时间向所述服务端发送当前位置信息;
29、相应的,所述接收列表单元具体用于接收服务端发送的与所述当前位置信息匹配的采集任务列表。
30、可选地,所述判断条件单元,包括:
31、位置判断模块,用于基于所述采集任务列表判断是否具有当前所处位置在任务区域内的目标任务。
32、可选地,若具有所述当前所处位置在任务区域内的目标任务,所述判断条件单元,还包括:
33、距离判断模块,用于判断所述当前所处位置与所述目标任务的任务区域的起点之间的距离是否小于任务阈值。
34、可选地,在所述当前所处位置与所述任务区域的起点之间的距离小于所述任务阈值的情况下,还包括:
35、数据判断单元,判断所述目标任务中的任务区域是否包含高度数据;相应的,所述生成指令单元用于在确定不包含所述高度数据的情况下,基于所述目标任务生成采集任务指令;
36、确定位置单元,用于在所述任务区域包含所述高度数据的情况下,在所述任务区域中确定与所述当前所处位置距离最近的目标任务位置;
37、高度判断单元,用于判断所述当前所处位置的高度与所述目标任务位置的高度是否小于高度阈值;相应的,所述生成指令单元用于在确定小于所述高度阈值的情况下,基于所述目标任务生成采集任务指令。
38、可选地,还包括:
39、实时监测单元,用于实时监测当前所处位置是否在所述目标任务的任务区域内;相应的,所述发送指令单元还用于在确定所述当前所处位置不在所述任务区域内的情况下,向所述工控机端发送结束采集任务指令,使得所述工控机端基于所述结束采集任务指令结束道路信息的采集;
40、接收信息单元,用于接收所述工控机端采集的道路信息以及记录的行驶轨迹;
41、发送信息单元,用于将所述道路信息和所述行驶轨迹发送至服务端。
42、本技术第三方面提供道路信息的采集系统,包括:
43、服务端,用于向车机端发送采集任务列表
44、所述车机端,用于接收所述服务端发送的所述采集任务列表,基于所述采集任务列表判断是否满足采集条件,若是,生成采集任务指令,将所述采集任务指令发送至目标车辆的工控机端;
45、所述工控机端,用于接收所述采集任务指令,基于所述采集任务指令对道路信息进行采集。
46、本技术第四方面提供一种电子设备,包括:
47、处理器;以及
48、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
49、本技术第五方面提供一种非暂时性机器可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
50、由此可见,本技术提供了道路信息的采集方法,应用于车机端,通过车机端接收服务端发送的采集任务列表,并在基于采集任务列表确定具有满足采集条件的目标任务的情况下,基于所述目标任务生成采集任务指令并发送至目标车辆的工控机端,由工控机端基于采集任务指令对道路信息进行采集,可见,本技术利用车机端实现服务端和目标车辆的工控机端之间的通信,工控机端为车辆本身所具有的模块,从而实现了任何车辆只要驾驶到任务范围内即可进行道路信息的采集,无需专门的车辆去执行采集任务,降低了成本,且提高了采集信息的速度,从而能够提高高精地图的更新效率。
51、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!