飞机螺旋桨的建模方法、装置及电子设备与流程
本发明涉及飞机螺旋桨测试,具体而言,涉及一种飞机螺旋桨的建模方法、装置及电子设备。
背景技术:
1、目前,螺旋桨在飞机领域和无人机领域被广泛使用,螺旋桨的静拉力和反扭矩是动力系统建模的重要参数,但是,现有技术中采用对螺旋桨测试台架进行测试所得到的静拉力数据和反扭矩数据进行建模,由于测试数据存在试验误差,导致建模准确度较低。
2、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种飞机螺旋桨的建模方法、装置及电子设备,以至少解决由于测试试验存在误差导致建模准确度较低的技术问题。
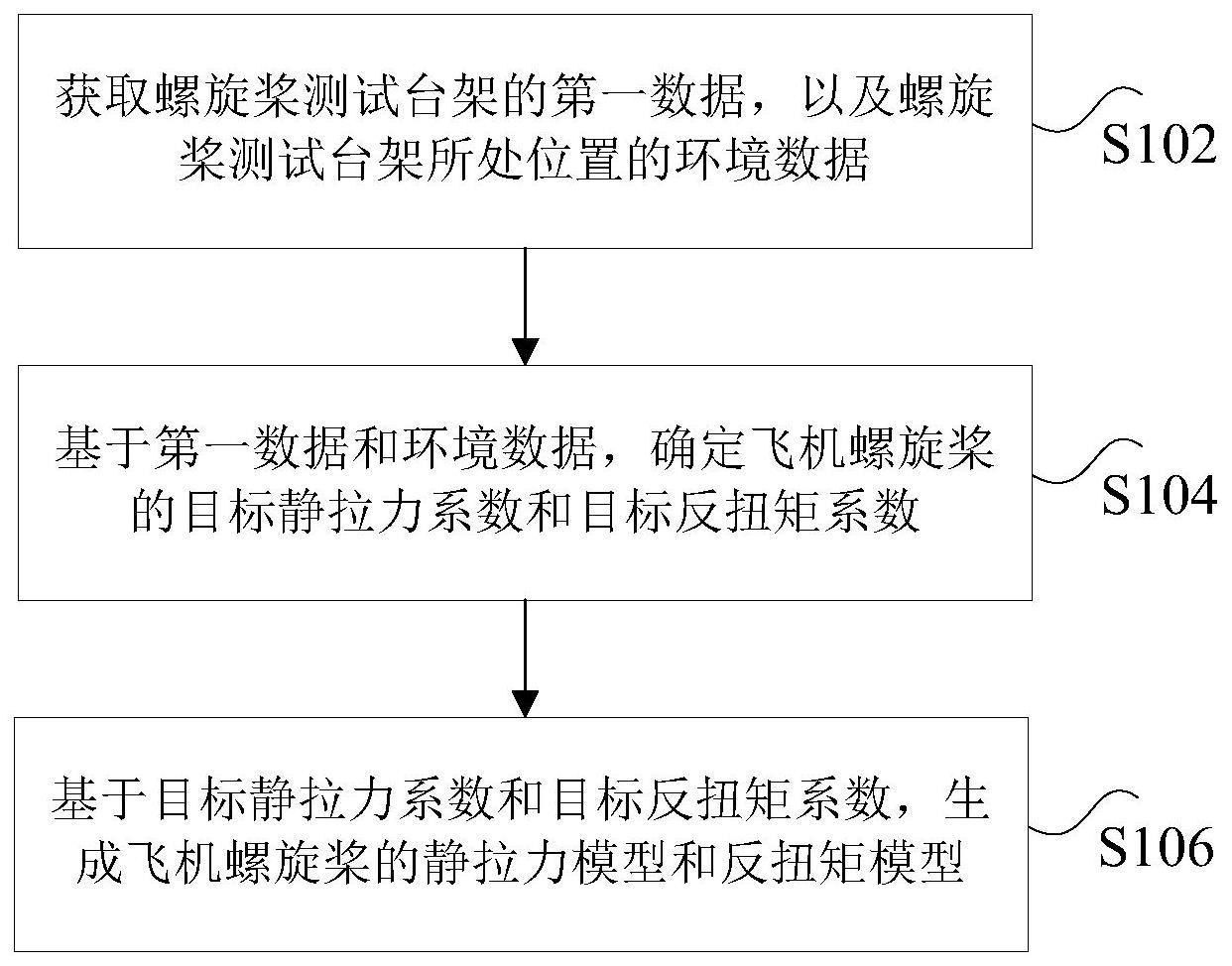
2、根据本发明实施例的一个方面,提供了一种飞机螺旋桨的建模方法,包括:获取螺旋桨测试台架的第一数据,以及螺旋桨测试台架所处位置的环境数据;基于第一数据和环境数据,确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数;基于目标静拉力系数和目标反扭矩系数,生成飞机螺旋桨的静拉力模型和反扭矩模型。
3、可选地,第一数据至少包括:飞机螺旋桨的第一反扭矩,其中,基于第一数据和环境数据,确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数,包括:从第一反扭矩中获取满足第一筛选条件的第二反扭矩,其中,第一筛选条件与飞机螺旋桨的电机效率相对应;基于环境数据、第一数据以及第二反扭矩,确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数,其中,目标静拉力系数用于表征所有静拉力数据都满足预设筛选条件的静拉力系数,目标反扭矩系数用于表征所有反扭矩数据都满足预设筛选条件的反扭矩系数;
4、可选地,从第一反扭矩中获取满足第一筛选条件的第二反扭矩,包括:获取螺旋桨测试台架的电机功率和轴功率;基于电机功率和轴功率,确定螺旋桨测试台架的电机效率;基于电机效率,获取电机最大效率和电机最小效率;响应于电机效率小于等于电机最大效率,且电机效率大于等于电机最小效率,确定第一反扭矩中满足第一筛选条件的第二反扭矩。
5、可选地,第一数据还包括:飞机螺旋桨的第一静拉力,其中,基于环境数据、第一数据以及第二反扭矩,确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数,包括:基于第一数据、第二反扭矩以及环境数据,拟合得到第一静拉力系数和第一反扭矩系数;基于第一静拉力系数和第一反扭矩系数,拟合得到第二静拉力和第三反扭矩;获取第二静拉力与第一静拉力的静拉力相对误差,以及第二反扭矩与第三反扭矩的反扭矩相对误差;响应于静拉力相对误差不满足预设静拉力置信度,或反扭矩相对误差不满足预设反扭矩置信度,重复执行拟合得到第一静拉力系数和第一反扭矩系数,拟合得到第二静拉力和第三反扭矩,以及获取静拉力相对误差和反扭矩相对误差的步骤,直至静拉力相对误差满足预设静拉力置信度,且反扭矩相对误差满足预设反扭矩置信度;确定满足预设静拉力置信度对应的静拉力系数为目标静拉力系数,以及满足预设反扭矩置信度对应的反扭矩系数为目标反扭矩系数。
6、可选地,第一数据还包括:飞机螺旋桨的转速和直径,环境数据至少包括:大气密度,其中,基于第一数据、第二反扭矩以及环境数据,拟合得到第一静拉力系数和第二反扭矩系数,包括:获取大气密度与飞机螺旋桨转速的平方的积值,得到第一积值;获取第一积值与螺旋桨直径的四次方的积值,得到第二积值;获取第一静拉力与第二积值的商值,得到第一静拉力系数;获取第一积值与螺旋桨直径的五次方的积值,得到第三积值;获取第二反扭矩与第三积值的商值,得到第一反扭矩系数。
7、可选地,基于第一静拉力系数、第一反扭矩系数,拟合第二静拉力和第三反扭矩,包括:获取第一静拉力系数与第二积值的积值,得到第二静拉力;获取第一反扭矩系数与第三积值的积值,得到第三反扭矩。
8、可选地,获取第二静拉力与第一静拉力的静拉力相对误差,以及第二反扭矩与第一反扭矩的反扭矩相对误差,包括:获取第一静拉力与第二静拉力的差值,得到第一差值;获取第一差值与第二静拉力的商值,得到第一商值;获取第一商值绝对值与预设阈值的积值,得到静拉力相对误差;获取第二反扭矩与第三反扭矩的差值,得到第二差值;获取第二差值与第三反扭矩的商值,得到第二商值;获取第二商值绝对值与预设阈值的积值,得到反扭矩的相对误差。
9、可选地,基于目标静拉力系数和目标反扭矩系数,生成飞机螺旋桨的静拉力模型和反扭矩模型,包括:获取目标静拉力系数与第二积值的积值,得到螺旋桨测试台架的静拉力模型;获取目标反扭矩系数与第三积值的积值,得到螺旋桨测试台架的反扭矩模型。
10、根据本发明实施例的另一方面,还提供了一种飞机螺旋浆的建模装置,包括:获取模块,用于获取螺旋桨测试台架的第一数据,以及螺旋桨测试台架所处位置的环境数据;确定模块,用于基于第一数据和环境数据,确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数;生成模块,用于基于目标静拉力系数和目标反扭矩系数,生成飞机螺旋桨的静拉力模型和反扭矩模型。
11、根据本发明实施例的另一方面,还提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器执行上述实施例中任意一项的飞机螺旋浆的建模方法。
12、根据本发明实施例的另一方面,还提供了一种非易失性存储介质,非易失性存储介质包括存储的程序,其中,在程序运行时控制所在设备的处理器中执行上述实施例中任意一项的飞机螺旋浆的建模方法。
13、在本发明实施例中,在获取螺旋桨测试台架的第一数据、以及螺旋桨测试台架所处位置的环境数据之后,根据第一数据和环境数据确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数,从而根据目标静拉力系数和目标反扭矩系数生成飞机螺旋桨的静拉力模型和反扭矩模型。需要注意的是,第一数据与环境数据共同确定的目标静拉力系数和目标反扭矩系数,可以准确的反应出螺旋桨测试台架在试验过程中真实的静拉力和反扭矩,从而根据目标静拉力系数和目标反扭矩系数建立的模型可以使模型的数据更为准确,实现了根据静拉力模型和反扭矩模型得到的数据与真实场景中测得数据更为贴切,达到了提升静拉力模型和反扭矩模型准确度的技术效果,进而解决了由于测试试验存在误差导致建模准确度较低的技术问题。
技术特征:
1.一种飞机螺旋浆的建模方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述第一数据至少包括:飞机螺旋桨的第一反扭矩,其中,基于所述第一数据和所述环境数据,确定所述飞机螺旋桨的目标静拉力系数和目标反扭矩系数,包括:
3.根据权利要求2所述的方法,其特征在于,从所述第一反扭矩中获取满足第一筛选条件的第二反扭矩,包括:
4.根据权利要求2所述的方法,其特征在于,所述第一数据还包括:飞机螺旋桨的第一静拉力,其中,基于所述环境数据、所述第一数据以及所述第二反扭矩,确定所述飞机螺旋桨的目标静拉力系数和目标反扭矩系数,包括:
5.根据权利要求4所述的方法,其特征在于,所述第一数据还包括:飞机螺旋桨的转速和直径,所述环境数据至少包括:大气密度,其中,基于所述第一数据、所述第二反扭矩以及所述环境数据,拟合得到第一静拉力系数和第二反扭矩系数,包括:
6.根据权利要求4所述的方法,其特征在于,基于所述第一静拉力系数、所述第一反扭矩系数,拟合第二静拉力和第三反扭矩,包括:
7.根据权利要求4所述的方法,其特征在于,获取所述第二静拉力与所述第一静拉力的静拉力相对误差,以及所述第二反扭矩与第一反扭矩的反扭矩相对误差,包括:
8.根据权利要求1所述的方法,其特征在于,基于所述目标静拉力系数和所述目标反扭矩系数,生成所述飞机螺旋桨的静拉力模型和反扭矩模型,包括:
9.一种飞机螺旋浆的建模装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括:
11.一种非易失性存储介质,其特征在于,所述非易失性存储介质包括存储的程序,其中,在所述程序运行时控制所在设备的处理器中执行权利要求1-8中任意一项所述的飞机螺旋浆的建模方法。
技术总结
本发明公开了一种飞机螺旋桨的建模方法、装置及电子设备。其中,该方法涉及空气螺旋桨测试技术领域,该方法包括:获取螺旋桨测试台架的第一数据,以及螺旋桨测试台架所处位置的环境数据;基于第一数据和环境数据,确定飞机螺旋桨的目标静拉力系数和目标反扭矩系数;基于目标静拉力系数和目标反扭矩系数,生成飞机螺旋桨的静拉力模型和反扭矩模型。本发明解决了由于测试试验存在误差导致建模准确度较低的技术问题。
技术研发人员:安彬,李赫,刘赛遥,刘嘉彬,李伟恒
受保护的技术使用者:深圳市道通智能航空技术股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!