一种基于激光点云的光伏面板单体的自动提取方法和系统与流程
本发明涉及光伏面板,尤其涉及一种基于激光点云的光伏面板单体的自动提取方法和系统。
背景技术:
1、随着低碳经济的快速及可持续发展带来的客观需求,光伏电站等新能源正逐渐引领着能源行业的未来发展。光伏电站基于太阳能电池等半导体电子器件的p-n结光生伏特效应原理,通过转换装置将光能转换为电能,能够充分利用光能,有着无污染、可再生的优点。
2、光伏电站的光伏组件等吸热设备需要露天放置,容易受到周边环境各类因素的影响,导致其光伏组件容易出现故障。为了监测光伏组件出现的各类故障,目前最简单的方案通过无人机挂载设备对光伏面板进行巡检拍摄。在无人机的光伏巡检中,巡检航线的确定是其一大难点,在规划巡检航线前需要确定拍摄点,以尽量拍摄更多的光伏面板。传统的拍摄点标注方法是人工手动标注,例如专利cn113031634b提供了一种基于无人机的光伏巡检方法,该方法利用无人机搭载红外相机进行巡检,具体需要在巡检前手动标注需要检查的光伏板中心位置,再确定无人机飞行航线进行巡检。
3、然而,光伏电站中光伏面板数量众多,手动标注各个光伏面板拍摄点会导致规划拍摄航线的工作量大,且容易出现漏检错检等现象,因此需要一种能自动化提取单一光伏面板方法来确定每一光伏面板的拍摄点。
技术实现思路
1、本发明提供一种基于激光点云的光伏面板单体的自动提取方案,旨在解决现有技术中手动标注各个光伏面板拍摄点导致的规划拍摄航线的工作量大,且容易出现漏检和误检的问题。
2、为解决上述问题,根据本发明的第一方面,本发明提出了一种基于激光点云的光伏面板单体的自动提取方法,包括:
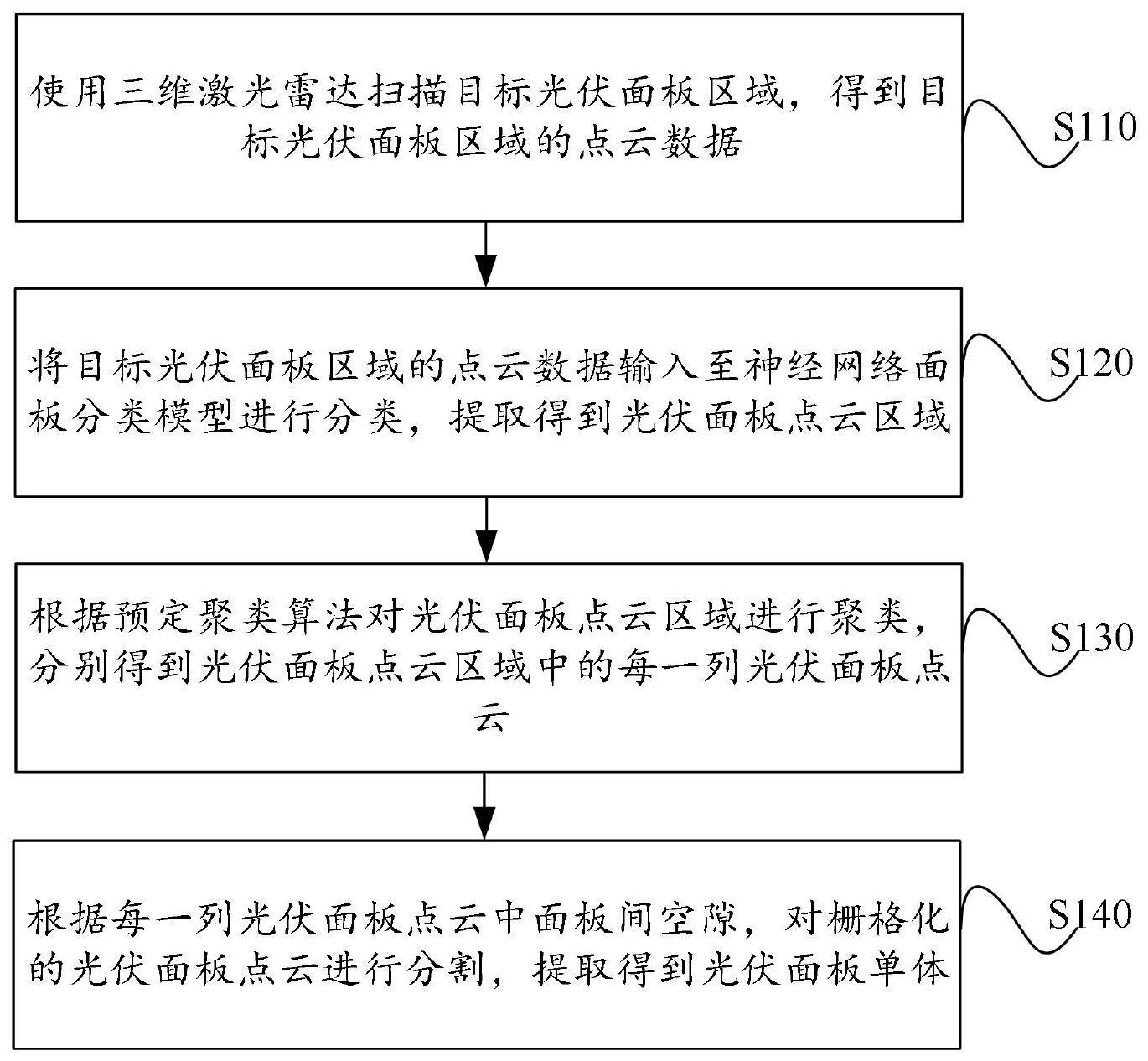
3、使用三维激光雷达扫描目标光伏面板区域,得到目标光伏面板区域的点云数据;
4、将目标光伏面板区域的点云数据输入至神经网络面板分类模型进行分类,提取得到光伏面板点云区域;
5、根据预定聚类算法对光伏面板点云区域进行聚类,分别得到光伏面板点云区域中的每一列光伏面板点云;
6、根据每一列光伏面板点云中面板间空隙,对栅格化的光伏面板点云进行分割,提取得到光伏面板单体。
7、优选的,上述自动提取方法中,使用三维激光雷达扫描目标光伏面板区域,得到目标光伏面板区域的点云数据的步骤包括:
8、使用三维激光雷达扫描目标光伏面板区域,采集目标光伏面板区域的点云数据;
9、对目标光伏区域的点云数据依次进行过滤、裁切和去噪处理,得到去噪后的目标光伏面板区域的点云数据。
10、优选的,上述自动提取方法中,将目标光伏面板区域的点云数据输入至神经网络面板分类模型进行分类,提取得到光伏面板点云区域的步骤,包括:
11、使用滑动窗口采样预设面板点云训练集中的面板点云数据,其中,预设面板点云训练集包括面板标签和非面板标签;
12、将面板点云数据输入至深度神经网络中进行训练,得到面板点云数据的分类结果;
13、根据面板标签和非面板标签对面板点云数据的分类结果进行验证;
14、重复训练深度神经网络直至深度神经网络的分类函数收敛,得到神经网络面板分类模型;
15、使用神经网络面板分类模型对目标光伏面板区域的点云数据进行分类,得到光伏面板点云区域。
16、优选的,上述自动提取方法中,根据预定聚类算法对光伏面板点云区域进行聚类,分别得到光伏面板点云区域中的每一列光伏面板点云的步骤,包括:
17、使用dbscan算法计算光伏面板点云区域中、任一激光点附近预定距离范围内的点密度;
18、根据点密度所在的密度范围,将光伏面板点云区域中所有激光点划分为核心点、边缘点和噪点;
19、对核心点以及核心点周围预定距离范围内的边缘点进行聚类,得到每一列光伏面板点云。
20、优选的,上述自动提取方法中,根据每一列光伏面板点云中面板间空隙,对栅格化的光伏面板点云进行分割,提取得到光伏面板单体的步骤,包括:
21、对每一列光伏面板点云进行投影和栅格化处理,得到栅格化的光伏面板点云;
22、使用未包含激光点的栅格,从栅格化的光伏面板点云中筛除面板之间空隙,得到光伏面板栅格;
23、对光伏面板栅格进行分割,提取光伏面板栅格的边缘,得到光伏面板单体。
24、优选的,上述自动提取方法中,对每一列光伏面板点云进行投影和栅格化处理,得到栅格化的光伏面板点云的步骤,包括:
25、获取每一列光伏面板点云的三维空间坐标;
26、根据三维空间坐标,将每一列光伏面板点云投影至水平面;
27、对投影至水平面的每一列光伏面板点云,使用包围盒包围每一列光伏面板点云的边缘轮廓;
28、按照预定格网半径切分包围盒中的每一列光伏面板点云,得到栅格化的光伏面板点云;
29、计算光伏面板点云中每一激光点所在格网的坐标。
30、优选的,上述自动提取方法中,根据每一列光伏面板点云中面板间空隙,对栅格化的光伏面板点云进行分割的步骤,包括:
31、根据每一列光伏面板点云中激光点的坐标,提取每一列光伏面板点云中面板间空隙的空隙角点,作为相邻光伏面板单体间的面板角点;
32、根据面板角点,提取包围盒内光伏面板单体的边缘轮廓;
33、按照边缘轮廓对光伏面板单体进行分割。
34、根据本发明的第二方面,本发明还提供了一种基于激光点云的光伏面板单体的自动提取系统,包括:
35、点云扫描模块,用于使用三维激光雷达扫描目标光伏面板区域,得到目标光伏面板区域的点云数据;
36、点云分类模块,用于将目标光伏面板区域的点云数据输入至神经网络面板分类模型中进行分类,提取得到光伏面板点云区域;
37、点云聚类模块,用于根据预定聚类算法对光伏面板点云区域进行聚类,分别得到光伏面板点云区域中每一列光伏面板点云;
38、点云分割模块,用于根据每一列光伏面板点云中面板间空隙,对栅格化的光伏面板点云进行分割,提取得到光伏面板单体。
39、优选的,上述自动提取系统中,点云分类模块包括:
40、点云采样子模块,用于使用滑动窗口采样预设面板点云训练集中的面板点云数据,其中,预设面板点云训练集包括面板标签和非面板标签;
41、点云训练子模块,用于将面板点云数据输入至深度神经网络中进行训练,得到面板点云数据的分类结果;
42、点云验证子模块,用于根据面板标签和非面板标签对面板点云数据的分类结果进行验证;
43、模型获取子模块,用于重复训练深度神经网络直至深度神经网络的分类函数收敛,得到神经网络面板分类模型;
44、面板分类子模块,用于使用神经网络面板分类模型对目标光伏面板区域的点云数据进行分类,得到光伏面板点云区域。
45、优选的,上述自动提取系统中,点云聚类模块包括:
46、点密度计算子模块,用于使用dbscan算法计算光伏面板点云区域中、任一激光点附近预定距离范围内的点密度;
47、激光点划分子模块,用于根据点密度所在的密度范围,将光伏面板点云区域中所有激光点划分为核心点、边缘点和噪点;
48、激光点聚类子模块,用于对核心点以及核心点周围预定距离范围内的边缘点进行聚类,得到每一列光伏面板点云。
49、优选的,上述自动提取系统中,点云分割模块包括:
50、点云处理子模块,用于对每一列光伏面板点云进行投影和栅格化处理,得到栅格化的光伏面板点云;
51、空隙筛除子模块,用于使用未包含激光点的栅格从栅格化的光伏面板点云中筛除面板之间空隙,得到光伏面板栅格;
52、栅格分割子模块,用于对光伏面板栅格进行分割;
53、边缘提取子模块,用于提取光伏面板栅格的边缘,得到光伏面板单体。
54、综上,本发明提供的基于激光点云的光伏面板单体的自动提取方案,通过使用三维激光雷达扫描目标光伏面板区域,能够得到该目标光伏面板区域的点云数据,然后使用神经网络面板分类模型对该目标光伏面板区域的点云数据进行分类,能够提取出该光伏面板点云区域,进一步地,使用预定聚类算法对该光伏面板点云区域进行自动聚类,就能够分别得到该光伏面板点云区域中每一列的光伏面板点云,该过程均为全自动处理,解决了现有技术中人工处理效率过低的问题,规避了人工处理过程中的漏检错检等问题。进一步地,根据每一列光伏面板点云中面板间隙,对栅格化的光伏面板点云进行分割,能够精确得到每一个光伏面板单体。因为光伏面板单体包括每个光伏面板的边缘,能够更精度地帮助确认每一光伏面板的拍摄点,保证无人机拍摄画面的清晰和准确。另外,激光点云精度高,通过上述算法自动确定的拍摄点能够达到厘米级误差,且不需要人工对准,进一步保证航线规划的准确性,减少人工因素导致的重复设计航线,导致航程浪费的问题。综上,本发明提供的技术方案,能够解决现有技术存在的手动标注各光伏面板拍摄点导致规划拍摄航线的工作量大,容易出现错检和漏检的问题。
- 还没有人留言评论。精彩留言会获得点赞!