自动驾驶行为的评估方法、装置、设备及存储介质与流程
本发明涉及自动驾驶控制领域,尤其涉及一种自动驾驶行为的评估方法、装置、设备及存储介质。
背景技术:
1、随着人工智能和控制技术的快速发展,自动驾驶技术逐渐被汽车厂家和用户所接受。通过开发自动控制程序来对车辆行驶过程中各种器件的控制,实现车辆的自动化驾驶。而车辆在行驶过程中,需要自动驾驶算法处理许多复杂多样的驾驶场景。对此,需要通过大量的测试场景对自动驾驶算法进行评估测试,如红路等遮挡场景是自动驾驶路测中容易发生问题的场景之一,前方驶过的大车、路边生长的树木、空中飘过的塑料袋等都有可能造成红绿灯的遮挡,在红路灯发生遮挡时,自动驾驶算法能够能准确地做出合理的反应是保证车辆的正常运行的前提,也是自动驾驶商业化运营前要实现的重要目标之一。
2、现今,对于红绿灯遮挡场景下自动驾驶行为的合理程度评估,通过人工收集车辆在真实道路上路测时的表现,并对自动驾驶在不同场景下的控制表现进行评估,从而评估该算法的优劣性以及反应是否合理。但是这种评估方法对于算法迭代迅速、且现今驾驶场景复杂多变的情况下,并不能保证评估效率且稳定可靠当前评估结果,即现有的红绿灯遮挡场景评估方法的效果较差。
技术实现思路
1、本发明的主要目的在于解决现有的红绿灯遮挡场景评估方法的效果较差的技术问题。
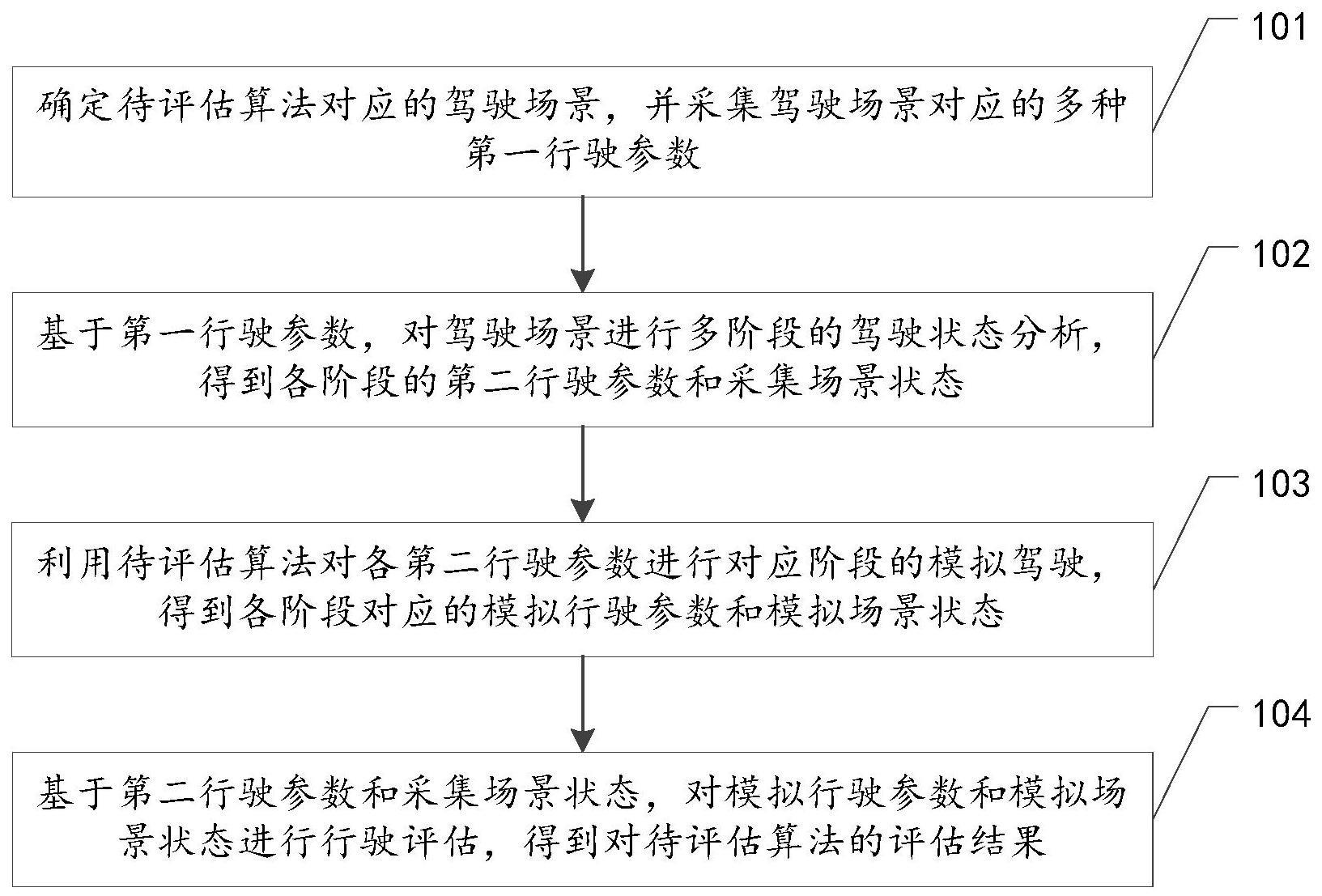
2、本发明第一方面提供了一种自动驾驶行为的评估方法,所述自动驾驶行为的评估方法包括:确定待评估算法对应的驾驶场景,并采集所述驾驶场景对应的多种第一行驶参数;基于所述第一行驶参数,对所述驾驶场景进行多阶段的驾驶状态分析,得到各阶段的第二行驶参数和采集场景状态;利用所述待评估算法对各所述第二行驶参数进行对应阶段的模拟驾驶,得到各阶段对应的模拟行驶参数和模拟场景状态;基于所述第二行驶参数和所述采集场景状态,对所述模拟行驶参数和模拟场景状态进行行驶评估,得到对所述待评估算法的评估结果。
3、可选的,在本发明第一方面的第一种实现方式中,所述第一行驶参数包括点云数据、行驶状态数据和指示灯数据,所述采集所述驾驶场景对应的多种第一行驶参数,包括:检测所述驾驶场景中对应的交通指示灯是否为遮挡状态;若所述驾驶场景对应的交通指示灯为遮挡状态,则采集预置测试车辆在所述遮挡状态下前后预设时间段内的点云数据、行驶状态数据和指示灯监测数据。
4、可选的,在本发明第一方面的第二种实现方式中,所述基于所述第一行驶参数,对所述驾驶场景进行多阶段的驾驶状态分析,得到各阶段的第二行驶参数和采集场景状态,包括:基于所述点云数据和所述行驶状态数据,检测所述测试车辆对应的跟随状态;基于所述跟随状态的检测结果,将所述遮挡状态划分为多个驾驶阶段;将各所述第一行驶参数映射至对应的驾驶阶段,得到各阶段的第二行驶参数,以及基于所述指示灯监测数据,映射各个驾驶阶段指示灯对应的采集场景状态。
5、可选的,在本发明第一方面的第三种实现方式中,所述基于所述点云数据和所述行驶状态数据,检测所述测试车辆对应的跟随状态,包括:判断所述测试车辆对应的前车车辆是否超过停车线区间内;若是所述测试车辆对应的前车车辆在停止线区间内,则所述测试车辆为跟随状态;若是所述测试车辆对应的前车车辆不在停止线区间内,则所述测试车辆为非跟随状态。
6、可选的,在本发明第一方面的第四种实现方式中,所述基于所述跟随状态的检测结果,将所述遮挡状态划分为多个驾驶阶段,包括:若所述测试车辆为非跟随状态,则判断所述测试车辆的行驶状态数据是否超过预设数值;若所述测试车辆行驶状态数据超过预设数值,则确定所述测试车辆为启动状态;若所述测试车辆行驶状态数据不超过预设数值,则确定所述测试车辆为停止状态;若所述测试车辆为跟随状态,则所述车辆为行驶状态。
7、可选的,在本发明第一方面的第五种实现方式中,所述基于所述第二行驶参数和所述采集场景状态,对所述模拟行驶参数和模拟场景状态进行行驶评估,得到对所述待评估算法的评估结果,包括:对比所述采集场景状态和所述模拟场景状态的对应状态图像,并基于图像对比的结果,计算出所述待评估算法的指示灯预测准确度;对比所述第二行驶参数与所述模拟行驶参数的对应阶段参数,并基于参数对比的结果,计算出所述待评估算法的行驶控制评分;基于所述指示灯预测准确度和所述状态控制评分,计算出对所述待评估算法的评估结果。
8、可选的,在本发明第一方面的第六种实现方式中,所述指示灯包括第一指示灯和第二指示灯,所述基于参数对比的结果,计算出所述待评估算法的行驶控制评分,包括:基于参数对比的结果,计算出所述测试车辆在第一指示灯下的超距距离,并计算出所述超距距离对应第一评分;基于参数对比的结果,计算出所述测试车辆在第二指示灯下的延迟距离,并计算出所述延迟距离对应第二评分;基于所述第一评分和所述第二评分,得到所述行驶控制评分。
9、本发明第二方面提供了一种自动驾驶行为的评估装置,所述自动驾驶行为的评估装置包括:采集模块,用于确定待评估算法对应的驾驶场景,并采集所述驾驶场景对应的多种第一行驶参数;分析模块,用于基于所述第一行驶参数,对所述驾驶场景进行多阶段的驾驶状态分析,得到各阶段的第二行驶参数和采集场景状态;驾驶模块,用于利用所述待评估算法对各所述第二行驶参数进行对应阶段的模拟驾驶,得到各阶段对应的模拟行驶参数和模拟场景状态;评估模块,用于基于所述第二行驶参数和所述采集场景状态,对所述模拟行驶参数和模拟场景状态进行行驶评估,得到对所述待评估算法的评估结果。
10、可选的,在本发明第二方面的第一种实现方式中,所述采集模块包括:遮挡检测单元,用于检测所述驾驶场景中对应的交通指示灯是否为遮挡状态;数据采集单元,用于若所述驾驶场景对应的交通指示灯为遮挡状态,则采集预置测试车辆在所述遮挡状态下前后预设时间段内的点云数据、行驶状态数据和指示灯监测数据。
11、可选的,在本发明第二方面的第二种实现方式中,所述分析模块包括:状态检测单元,用于基于所述点云数据和所述行驶状态数据,检测所述测试车辆对应的跟随状态;状态划分单元,用于基于所述跟随状态的检测结果,将所述遮挡状态划分为多个驾驶阶段;映射单元,用于将各所述第一行驶参数映射至对应的驾驶阶段,得到各阶段的第二行驶参数,以及基于所述指示灯监测数据,映射各个驾驶阶段指示灯对应的采集场景状态。
12、可选的,在本发明第二方面的第三种实现方式中,所述状态检测单元包括:判断所述测试车辆对应的前车车辆是否超过停车线区间内;若是所述测试车辆对应的前车车辆在停止线区间内,则所述测试车辆为跟随状态;若是所述测试车辆对应的前车车辆不在停止线区间内,则所述测试车辆为非跟随状态。
13、可选的,在本发明第二方面的第四种实现方式中,所述状态划分单元包括:若所述测试车辆为非跟随状态,则判断所述测试车辆的行驶状态数据是否超过预设数值;若所述测试车辆行驶状态数据超过预设数值,则确定所述测试车辆为启动状态;若所述测试车辆行驶状态数据不超过预设数值,则确定所述测试车辆为停止状态;若所述测试车辆为跟随状态,则所述车辆为行驶状态。
14、可选的,在本发明第二方面的第五种实现方式中,所述评估模块包括:图像对比单元,用于对比所述采集场景状态和所述模拟场景状态的对应状态图像,并基于图像对比的结果,计算出所述待评估算法的指示灯预测准确度;参数对比单元,用于对比所述第二行驶参数与所述模拟行驶参数的对应阶段参数,并基于参数对比的结果,计算出所述待评估算法的行驶控制评分;评分计算单元,用于基于所述指示灯预测准确度和所述状态控制评分,计算出对所述待评估算法的评估结果。
15、可选的,在本发明第二方面的第六种实现方式中,所述参数对比单元包括:基于参数对比的结果,计算出所述测试车辆在第一指示灯下的超距距离,并计算出所述超距距离对应第一评分;基于参数对比的结果,计算出所述测试车辆在第二指示灯下的延迟距离,并计算出所述延迟距离对应第二评分;基于所述第一评分和所述第二评分,得到所述行驶控制评分。
16、本发明第三方面提供了一种自动驾驶行为的评估设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述自动驾驶行为的评估设备执行上述的自动驾驶行为的评估方法的各个步骤。
17、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的自动驾驶行为的评估方法的各个步骤。
18、本发明提供的技术方案中,通过确定待评估算法对应的驾驶场景,并采集驾驶场景对应的多种第一行驶参数;基于第一行驶参数,对驾驶场景进行多阶段的驾驶状态分析,得到各阶段的第二行驶参数和采集场景状态;利用待评估算法对各第二行驶参数进行对应阶段的模拟驾驶,得到各阶段对应的模拟行驶参数和模拟场景状态;基于第二行驶参数和采集场景状态,对模拟行驶参数和模拟场景状态进行行驶评估,得到对待评估算法的评估结果。相比于现有技术,本技术通过采集相关驾驶场景的行驶数据和第一状态数据,进而基于采集行驶数据,利用自动驾驶算法模拟进行仿真驾驶,以及实时记录对应第二状态数据,从而基于第一状态数据和第二状态数据进行评估,得到对待评估算法的评估结果。实现了对红绿灯遮挡场景更佳的评估效果。
- 还没有人留言评论。精彩留言会获得点赞!