一种基于图像识别的建筑物监测系统及其巡逻机器人的制作方法
本发明涉及一种环境监测机器人,具体是一种基于图像识别的建筑物监测系统及其巡逻机器人。
背景技术:
1、随着社会经济的高速发展,各种现代化建筑纷纷建起,建筑物关乎人们生活、工作等活动,所以对于建筑物的建筑质量有着非常严谨的要求,而对于建筑物的验收,往往是由专业的验收人员亲自到现场进行现场监测,对于环境比较复杂的施工现场(涉及的管路、电路、支架等多而复杂),验收人员在监测过程中容易遗漏或出错,导致投入使用的建筑物存在不足缺陷,甚至具有安全问题,且验收人员的监测效率较低;因此,有必要设计一种用于监测建筑物的系统。
技术实现思路
1、本发明的目的在于克服上述现有技术存在的不足,而提供一种基于图像识别的建筑物监测系统及其巡逻机器人,本系统可对施工现场进行监测,以监测施工现场中的监测目标是否出错,进而可保证建筑工程准确无误。
2、本发明的目的是这样实现的:
3、一种基于图像识别的建筑物监测系统,包括以下监测步骤:
4、①扫描:巡逻机器人在设定的监测位置利用摄像模块对监测目标所在的施工现场进行图像扫描,以捕捉施工现场的视频图像;
5、②分析:巡逻机器人利用能够检测和识别监测目标的图像识别算法对视频图像中的物体进行识别,以从物体群中抽取监测目标,并将监测目标的虚拟图像转换成相应的目标图像数据;
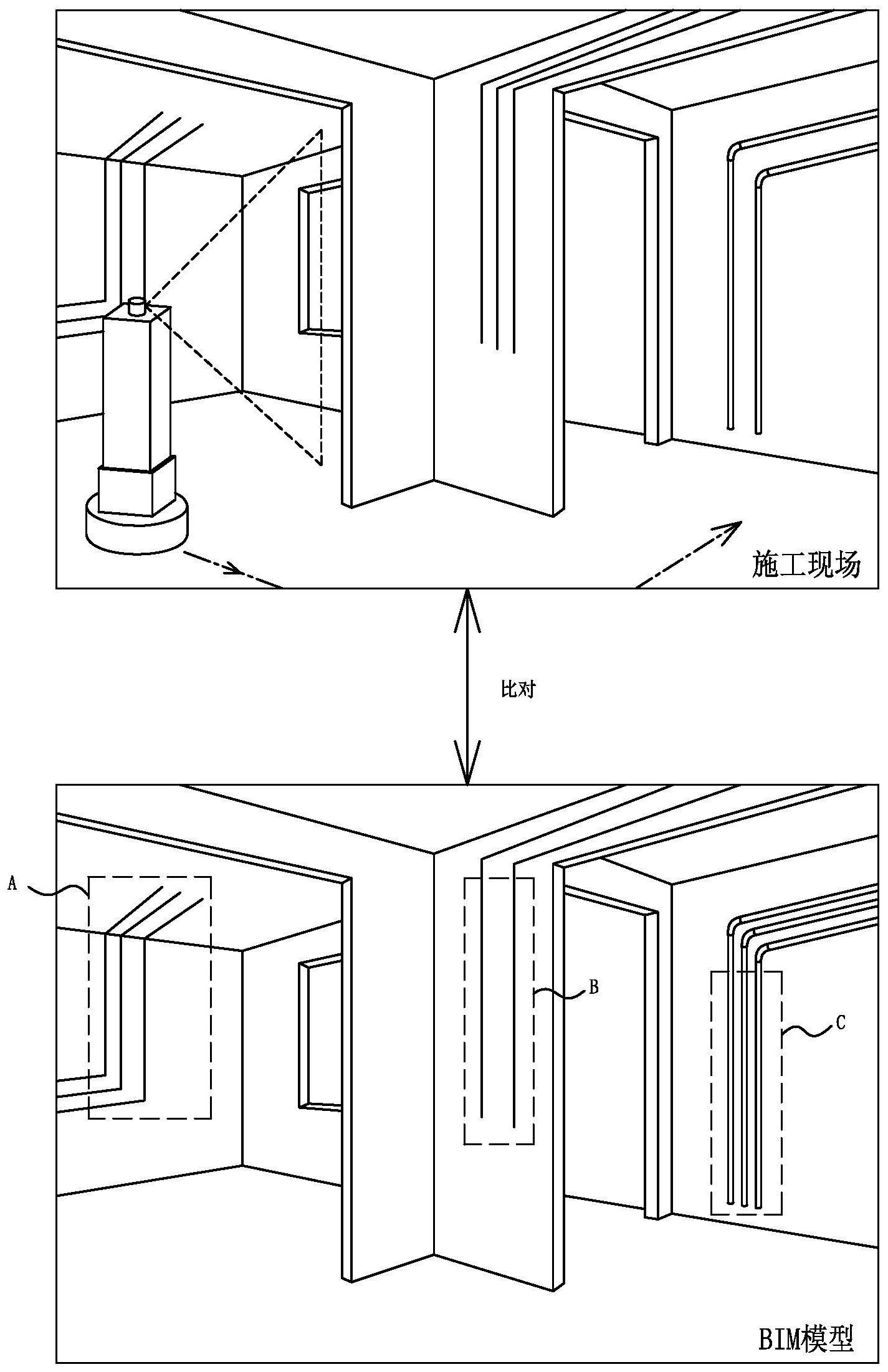
6、③比对:巡逻机器人把目标图像数据与预先录入的bim模型进行比对,使用可以识别目标图像数据与bim模型之间差异的数据比对算法进行比对,得到对应的图像比对结果;
7、④确定:巡逻机器人使用基于图像比对结果进行分析的数据分析算法做出决定,确定监测目标是否存在问题;
8、⑤报告:巡逻机器人生成监测结果报告,监测结果报告包括有差异的视频图像和bim模型、以及与监测目标有关的潜在问题;监测结果报告发送给控制终端以采取进一步措施。
9、扫描前,控制终端的操作人员先设定监测位置,即从bim模型中抽取能够扫描监测目标的画面,确定画面中的监测目标,并截图成监测图像保存于资料库中;控制终端的系统根据监测图像分析确定监测位置、及巡逻机器人上摄像模块的摄像方式,并根据监测位置规划出巡逻轨迹、根据施工现场情况确定巡逻时间和巡逻坐标,摄像方式包括摄像模块的取景角度和取景方向;巡逻轨迹、巡逻时间、摄像方式、及监测目标对应的目标数据整合形成对应的巡逻任务,并下发至巡逻机器人上。
10、所述巡逻轨迹上有一个以上监测位置,各监测位置上涉及的监测目标有一个以上。
11、所述图像识别算法通过图像处理技术根据图像特征和边缘探测进行分析,以获得视频图像中一个以上物体的图像数据,当图像数据与目标数据一致时,确定该图像数据对应的物体为监测目标,进而从视频图像中识别监测目标。
12、所述数据比对算法获取视频图像中不同方位和角度,以从视频图像导出监测目标的不同方位和角度,并抽取该监测目标与bim模型中对应的监测图像进行图像比对,通过比对确定监测目标,及其数量、位置和运行是否异常。
13、所述监测结果报告是基于一次以上巡逻任务统计而得,所述监测结果报告包括监测位置、监测目标,目标状态。
14、一种用于上述建筑物监测系统的巡逻机器人,包括巡逻控制系统、环境监测系统、va摄像系统和自动导航移动系统;所述巡逻控制系统分别电连接所述环境监测系统、va摄像系统和自动导航移动系统;所述巡逻控制系统、环境监测系统和va摄像系统中的摄像模块分别设置于机器人机身上,所述自动导航移动系统设置于移动底座上;所述图像识别算法、所述数据比对算法和所述数据分析算法分别装载于所述巡逻控制系统上;所述巡逻控制系统与所述控制终端通讯互联。
15、所述巡逻控制系统包括机器人计算机,所述图像识别算法、所述数据比对算法和所述数据分析算法分别装载于所述机器人计算机上;所述va摄像系统包括用于捕捉施工现场视频图像的摄像模块;所述摄像模块数据连接所述机器人计算机;所述机器人计算机通过路由器通讯连接所述控制终端。
16、所述环境监测系统包括空气质量传感器、噪音传感器和光传感器;所述空气质量传感器、所述噪音传感器和所述光传感器数据连接所述机器人计算机。
17、所述自动导航移动系统还包括移动控制模块、移动装置和供电模块,所述移动控制模块数据连接所述机器人计算机,所述移动装置电连接所述移动控制模块,所述供电模块分别电连接所述机器人计算机和所述移动控制模块。
18、本发明的有益效果如下:
19、本建筑物监测系统通过va图像分析技术进行现场工程监测,进而能有效识别楼宇、屋内、工程等建筑中的建筑构件是否有出错。具体地,本建筑物监测系统通过摄像模块对施工现场进行图像扫描,利用va图像分析技术识别监测目标并与机器人上监测系统的数据进行比较,以根据bim模型进行验证,使施工现场扫描的结果与bim模型之间的差异突出显示以进行深度检查,最终确定监测目标是否有潜在问题;建筑物监测系统中的巡逻机器人是自动导航移动机器人,其根据设定的轨迹进行移动,工作期间巡逻机器人会去不同的检查点进行现场检查,并根据检查站的预设条件识别不同的物体。
技术特征:
1.一种基于图像识别的建筑物监测系统,其特征在于:包括以下监测步骤:
2.根据权利要求1所述建筑物监测系统,其特征在于:扫描前,控制终端的操作人员先设定监测位置,即从bim模型中抽取能够扫描监测目标的画面,确定画面中的监测目标,并截图成监测图像保存于资料库中;控制终端的系统根据监测图像分析确定监测位置、及巡逻机器人(100)上摄像模块的摄像方式,并根据监测位置规划出巡逻轨迹、根据施工现场(200)情况确定巡逻时间和巡逻坐标,摄像方式包括摄像模块的取景角度和取景方向;巡逻轨迹、巡逻时间、摄像方式、及监测目标对应的目标数据整合形成对应的巡逻任务,并下发至巡逻机器人(100)上。
3.根据权利要求2所述建筑物监测系统,其特征在于:所述巡逻轨迹上有一个以上监测位置,各监测位置上涉及的监测目标有一个以上。
4.根据权利要求2所述建筑物监测系统,其特征在于:所述图像识别算法通过图像处理技术根据图像特征和边缘探测进行分析,以获得视频图像中一个以上物体的图像数据,当图像数据与目标数据一致时,确定该图像数据对应的物体为监测目标,进而从视频图像中识别监测目标。
5.根据权利要求2所述建筑物监测系统,其特征在于:所述数据比对算法获取视频图像中不同方位和角度,以从视频图像导出监测目标的不同方位和角度,并抽取该监测目标与bim模型中对应的监测图像进行图像比对,通过比对确定监测目标,及其数量、位置和运行是否异常。
6.根据权利要求1所述建筑物监测系统,其特征在于:所述监测结果报告是基于一次以上巡逻任务统计而得,所述监测结果报告包括监测位置、监测目标,目标状态。
7.一种用于如权利要求1-6所述建筑物监测系统的巡逻机器人(100),其特征在于:包括巡逻控制系统、环境监测系统、va摄像系统和自动导航移动系统;所述巡逻控制系统分别电连接所述环境监测系统、va摄像系统和自动导航移动系统;所述巡逻控制系统、环境监测系统和va摄像系统中的摄像模块分别设置于机器人机身上,所述自动导航移动系统设置于移动底座上;所述图像识别算法、所述数据比对算法和所述数据分析算法分别装载于所述巡逻控制系统上;所述巡逻控制系统与所述控制终端通讯互联。
8.根据权利要求7所述巡逻机器人(100),其特征在于:所述巡逻控制系统包括机器人计算机,所述图像识别算法、所述数据比对算法和所述数据分析算法分别装载于所述机器人计算机上;所述va摄像系统包括用于捕捉施工现场(200)视频图像的摄像模块;所述摄像模块数据连接所述机器人计算机;所述机器人计算机通过路由器通讯连接所述控制终端。
9.根据权利要求7所述巡逻机器人(100),其特征在于:所述环境监测系统包括空气质量传感器、噪音传感器和光传感器;所述空气质量传感器、所述噪音传感器和所述光传感器数据连接所述机器人计算机。
10.根据权利要求7所述巡逻机器人(100),其特征在于:所述自动导航移动系统还包括移动控制模块、移动装置和供电模块,所述移动控制模块数据连接所述机器人计算机,所述移动装置电连接所述移动控制模块,所述供电模块分别电连接所述机器人计算机和所述移动控制模块。
技术总结
本发明涉及一种基于图像识别的建筑物监测系统及其巡逻机器人,建筑物监测系统包括以下监测步骤:①扫描:巡逻机器人在设定的监测位置利用摄像模块对施工现场进行图像扫描,以捕捉视频图像;②分析:巡逻机器人对视频图像中的物体进行识别,以从物体群中抽取监测目标,并将监测目标的虚拟图像转换成相应的目标图像数据;③比对:巡逻机器人把目标图像数据与预先录入的BIM模型进行比对,得到对应的图像比对结果;④确定:巡逻机器人确定监测目标是否存在问题;⑤报告:巡逻机器人生成监测结果报告;监测结果报告发送给控制终端以采取进一步措施。本系统可对施工现场进行监测,以监测施工现场中的监测目标是否出错,进而可保证建筑工程准确无误。
技术研发人员:高毅骏,麦骞誉
受保护的技术使用者:大成环境科技拓展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!