基于密度聚类和循环模糊神经网络的涡轮机组预测方法
本发明涉及工业自动化控制,尤其涉及基于密度聚类和循环模糊神经网络的涡轮机组预测方法。
背景技术:
1、随着国民经济的快速发展和高耗能行业的发展,全球能源需求急剧增加。但全球36%的能源消费仍严重依赖于煤炭的燃烧,从环境保护和改善的角度来看,研究清洁燃煤发电技术是非常必要的。而与传统的发电技术相比,usc锅炉涡轮机组不仅能提供高达46%的净效率,还能降低30%的co2强度。usc的主要目标是实现电功率、主蒸汽压力和蒸汽温度的快速跟踪,因此精确控制涡轮机组的燃料流量、调节阀量和水流量至关重要。
2、为了提高锅炉涡轮机组的性能,结合神经网络和模糊逻辑系统的优点,模糊神经网络(fnns)已被研究。为了获得更好的非线性系统预测精度,递归模糊神经网络(rfnns)受到了广泛的关注,其反馈的网络环路用于存储过去的信息。因此,rfnn可以捕获更多非线性系统的动态响应,提高学习效率。rfnn的动力学建模包括结构学习和参数学习两个阶段,这两个阶段可以同时进行。在进行结构学习之前,一般会预先对rfnn的一些参数进行赋值,如模糊集的个数、隶属函数的初始位置等。虽然隶属函数的初始中心和宽度是预定义的,但这些参数在迭代学习过程中会发生变化。而参数学习阶段反过来又会影响rfnn的结构学习和预测性能。为了解决动态系统建模和温度控制问题,采用递归最小二乘(rls)识别rfnn中的未知参数,而模糊集的数量是根据专家经验预定义的。然而在rfnn的迭代学习过程中,需要对高斯隶属函数的中心和宽度进行训练,这些预定义的模糊集数和隶属度函数的多参数使模糊神经网络的自适应能力和效率降低。
3、一般情况下,模糊集的数量过多会降低模糊神经网络的灵活性和泛化能力。为了构造一个紧凑的网络,聚类方法能自动确定模糊集和模糊规则的数量。现有优化聚类方法主要有k-均值聚类、模糊c均值聚类、基于密度的聚类(dbscan)等。在构建的神经网络迭代学习之前,将得到的聚类结果用于确定高斯隶属函数的初始中心和宽度,并用聚类中心取代隶属函数的中心。而将基于密度的聚类(dbscan)和循环模糊神经网络(rfnn)相结合用于涡轮机组输出预测的方法未被研究。
技术实现思路
1、本发明的目的是为了解决现有技术中未考虑到历史输入数据的分布密度和聚类特性导致非线性系统输出的预测精度下降的问题,而提出一种基于密度聚类和循环模糊神经网络的涡轮机组预测方法,根据历史输入数据的分布密度和聚类特性,利用dbscan聚类算法自动确定模糊神经网络中最优模糊集数目,提升了系统建模的泛化程度和效率,同时,本发明构建7层循环模糊神经网络(rfnn),改进模糊隶属度函数,以dbscan聚类算法获得的聚类质心作为隶属度函数的中心,使得rfnn的学习过程只需要对自适应重叠系数进行单参数迭代学习,与fnn模型相比,本发明的dbscan-rfnn模型具有充分利用过去信息的能力,在降低计算复杂度的同时获得更高的系统建模预测精度,从而提高超临界锅炉涡轮机组输出的控制性能。
2、为了实现上述发明目的,本发明采用技术方案具体为:基于密度聚类和循环模糊神经网络的涡轮机组预测方法,包括以下步骤:
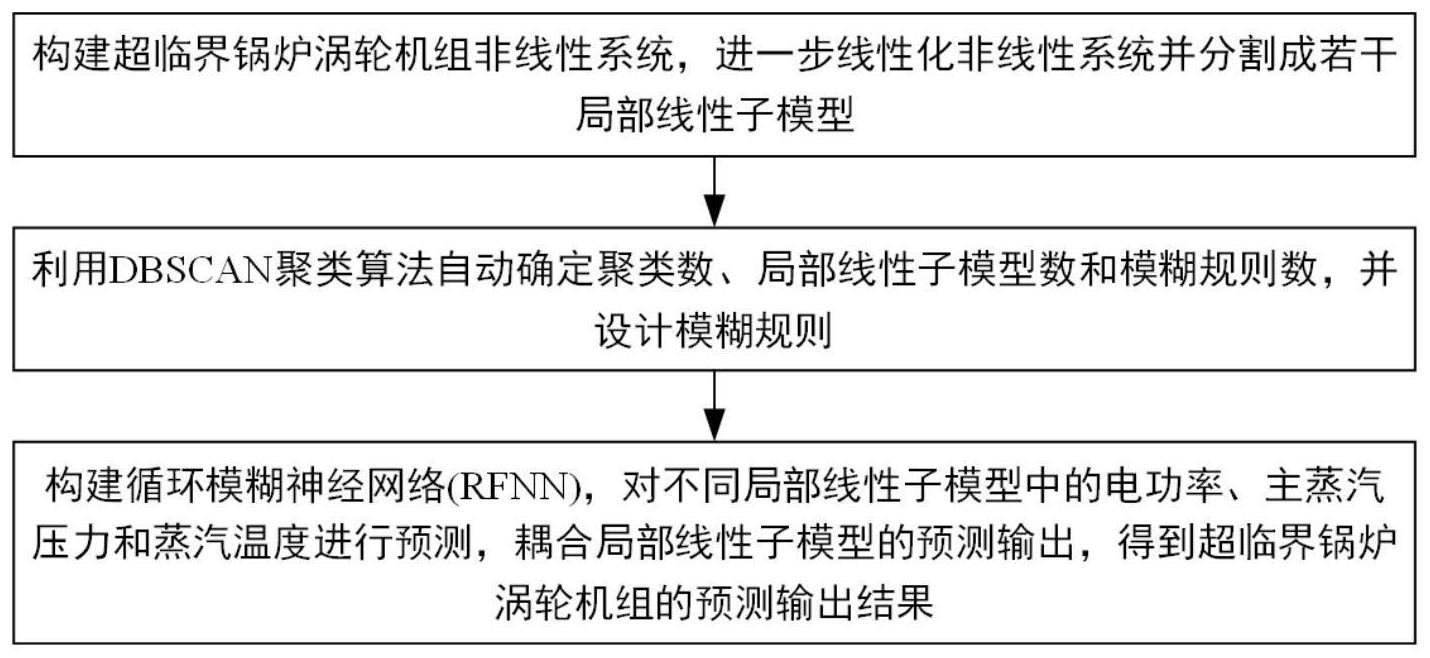
3、s1:构建超临界锅炉涡轮机组非线性系统,进一步线性化非线性系统并分割成若干局部线性子模型;
4、s2:利用dbscan聚类算法自动确定聚类数、局部线性子模型数和模糊规则数,并设计模糊规则;
5、s3:构建循环模糊神经网络(rfnn),对不同局部线性子模型中的电功率、主蒸汽压力和蒸汽温度进行预测,耦合局部线性子模型的预测输出,得到超临界锅炉涡轮机组的预测输出结果。
6、所述步骤s1具体包含以下步骤:
7、步骤1.1:考虑到涡轮机组的复杂非线性特性,将超临界(usc)锅炉涡轮机组建模为非线性系统,即:
8、y(t)=f[y(t-1),...,y(t-ny),
9、u(t-d),...,u(t-nu),
10、e(t-1),...,e(t-ne)]+e(t)/△,
11、其中,f(·)为未知非线性函数,为t时刻非线性系统的输出向量,na为输出变量的个数,为t时刻非线性系统的输入向量,nb为输入变量的个数,为零均值高斯白色噪声,d为系统延迟时间,ny、nu和ne分别为y(t)、u(t)和e(t)中的最大滞后,δ为差分算子。考虑到计算成本和预测精度,设置最大滞后ny=nu=ne=3。
12、步骤1.2:进一步线性化非线性系统为受控自回归积分滑动平均(carima)模型:
13、
14、其中,z-1为后移算子,δu(t-1)=u(t-1)-u(t-2)为输入向量在t-1时刻的增量,和分别表示后移算子z-1的多项式矩阵,且:
15、
16、
17、c(z-1)=i,
18、其中,i为单位矩阵;
19、步骤1.3:采集1000mw超临界锅炉涡轮机组不同时刻的实际样本数据;
20、步骤1.4:以电功率、主蒸汽压力和蒸汽温度作为非线性系统的控制输出y(t),以燃料流量、调节阀量和水流量作为系统的控制输入u(t),则:
21、y(t)=[y1(t),y2(t),y3(t)]t
22、u(t)=[u1(t),u2(t),u3(t)]t
23、na=nb=3;
24、其中,y(t)为非线性系统的输出向量,u(t)为非线性系统的输出向量,y1(t)为t时刻的电功率,y2(t)为t时刻的主蒸汽压力,y3(t)为t时刻的蒸汽温度,u1(t)为t时刻的燃料流量,u2(t)为t时刻的调节阀量,u3(t)为t时刻的水流量;
25、步骤1.5:为了更好地近似非线性涡轮机组,将非线性系统分割成若干局部线性子模型(局部carima模型):
26、
27、其中,yi(t)为第i个局部线性子模型的输出向量,δui(t-1)为第i个局部线性子模型的输入向量在t-1时刻的增量,ei(t)为第i个局部线性子模型的零均值高斯白色噪声,和bi(z-1)∈r3×3为第i个局部线性子模型的多项式矩阵。
28、作为本发明提供的基于密度聚类和循环模糊神经网络的涡轮机组预测方法进一步优化方案,所述步骤s2具体包含以下步骤:
29、步骤2.1:利用dbscan聚类算法,对输入数据u(t)进行聚类,自动确定聚类数为l;
30、步骤2.2:确定局部线性子模型数和模糊规则数同为l;
31、步骤2.2:设计l条if-then模糊规则ri:如果u1(t)为u2(t)为u3(t)为那么第i个局部线性子模型的线性输出为:
32、
33、其中,ri为第i条模糊规则,为输入变量uj的第i个模糊集,aiq∈r3×3和bik∈r3×3为第i个局部线性子模型的多项式矩阵,i=1,2,…,l;j=1,2,3;q=1,2,3;k=1,2,3。
34、作为本发明提供的基于密度聚类和循环模糊神经网络的涡轮机组预测方法进一步优化方案,所述步骤s3具体包含以下步骤:
35、步骤3.1:构建7层循环模糊神经网络(rfnn),第一层以u(t)作为rfnn的输入,以y(t)作为rfnn的输出;
36、步骤3.2:第二层设计改进的模糊隶属度函数取l个聚类中心作为改进的模糊隶属度函数的中心,
37、
38、其中,为输入变量uj(t)与模糊隶属度函数的中心之间的距离,由固定聚类质心中的第j个元素确定,而固定聚类质心由dbscan聚类算法确定,ηij为调整模糊隶属函数宽度的自适应重叠系数,且ηij的值越大模糊隶属度函数的宽度就越大;
39、步骤3.3:第三层构造空间强度层,每个节点表示一个模糊规则的空间强度,得到每条模糊规则ri在t时刻的空间触发强度ωi(t):
40、
41、步骤3.4:第四层构造时间强度层,每个节点可以递归更新信息,形成反馈环。设为第i个递归规则节点在t时刻的输出,即为时间触发强度,它不仅取决于t时刻的空间触发强度ωi(t),还取决于t-1时刻的时间触发强度每个递归规则节点的输出是t时刻的空间触发强度ωi(t)和t-1时刻的时间触发强度的一个线性组合:
42、
43、其中,βi为属于(0,1)之间的动态反馈权值,用于衡量t时刻的空间触发强度ωi(t)与t-1时刻的时间触发强度之间的权重,且
44、步骤3.5:第五层构造顺序层,这层中的节点被称为后件节点,用于调整第四层中的时间强度节点的权重,后件节点的输出fi(t)为:
45、
46、其中,aij和si为参数学习过程中需要调整的自由参数;
47、步骤3.6:第六层对输出节点进行归一化:
48、
49、其中,为后件节点的输出fi(t)的归一化结果;
50、步骤3.7:第七层对不同局部线性子模型中的电功率、主蒸汽压力和蒸汽温度进行预测,并将l个局部线性子模型的预测输出进行耦合;
51、步骤3.8:得到超临界锅炉涡轮机组的预测输出结果
52、本发明公式中符号含义说明如表1所示:
53、
54、
55、
56、与现有技术相比,本发明的有益效果为:
57、(1)本发明根据历史输入数据的分布密度和聚类特性,利用dbscan聚类算法自动确定模糊神经网络中最优模糊集数目,提升了系统建模的泛化程度和效率。
58、(2)本发明构建7层循环模糊神经网络(rfnn),改进模糊隶属度函数,以dbscan聚类算法获得的聚类质心作为隶属度函数的中心,使得rfnn的学习过程只需要对自适应重叠系数进行单参数迭代学习,与fnn模型相比,本发明的dbscan-rfnn模型具有充分利用过去信息的能力,在降低计算复杂度的同时获得更高的系统建模预测精度,从而提高超临界锅炉涡轮机组输出的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!