一种无须外方位元素支持下的LiDAR点云与无人机影像多级配准方法、装置及存储介质与流程
本发明涉及数据处理,尤其是一种无须外方位元素支持下的lidar点云与无人机影像多级配准方法、装置及存储介质。
背景技术:
1、点云配准是指通过某种配准算法计算得到2组不同点云的刚体变换参数,然后再利用变换参数将2组点云统一到同一坐标系下。两种数据融合的前提和关键是lidar(lightdetectionand ranging,机载激光雷达)点云与影像的配准,目前两者配准的方法主要有3种,一种是利用重叠影像进行密集匹配生成匹配点云,再与lidar点云数据进行3d-3d模型的配准,无法进行lidar点云与单张影像的配准,同时生成匹配点云的过程也会产生误差和降低精度。第2种是利用lidar数据的高程信息等将点云数据转化成二维影像,再利用图像配准的方法进行配准。第3种是建立遥感影像与lidar点云之间的直接配准关系。
2、直接迭代最近点算法(iterative closestpoint,icp)算法作为点云配准为常用的算法之一,具有简单、复杂度低等优点。但icp算法存在计算效率低、鲁棒性差、无初值时收敛慢等问题。如何高效、快捷、准确地实现无须外方位元素支持下的lidar点云与无人机影像配准,成为lidar点云与无人机影像配准自动化处理领域所面临的瓶颈。
3、近年来,不少研究人员针对icp算法效率不高问题提出了大量的改进算法。如li等人通过动态调整刚体变换参数的因子减少icp算法迭代次数,虽然改进的算法提高了对应点搜索效率,点云配准时间相比于传统方法要更短,精度有所提高,但是其配准算法仍然要耗费较长时间,且未兼顾考虑配准效率和精度。因此,为了满足lidar点云与无人机影像高精度配准的需要,本发明提出了一种基于无须外方位元素支持下的lidar点云与无人机影像多级配准方法。
技术实现思路
1、本发明的目的在于克服背景技术中的不足,提供一种无须外方位元素支持下的li dar点云与无人机影像多级配准方法、装置及存储介质,有效提高i cp算法精配准的准确性和收敛效率。
2、本发明采用的技术方案如下:一种无须外方位元素支持下的lidar点云与无人机影像多级配准方法,包括以下步骤:
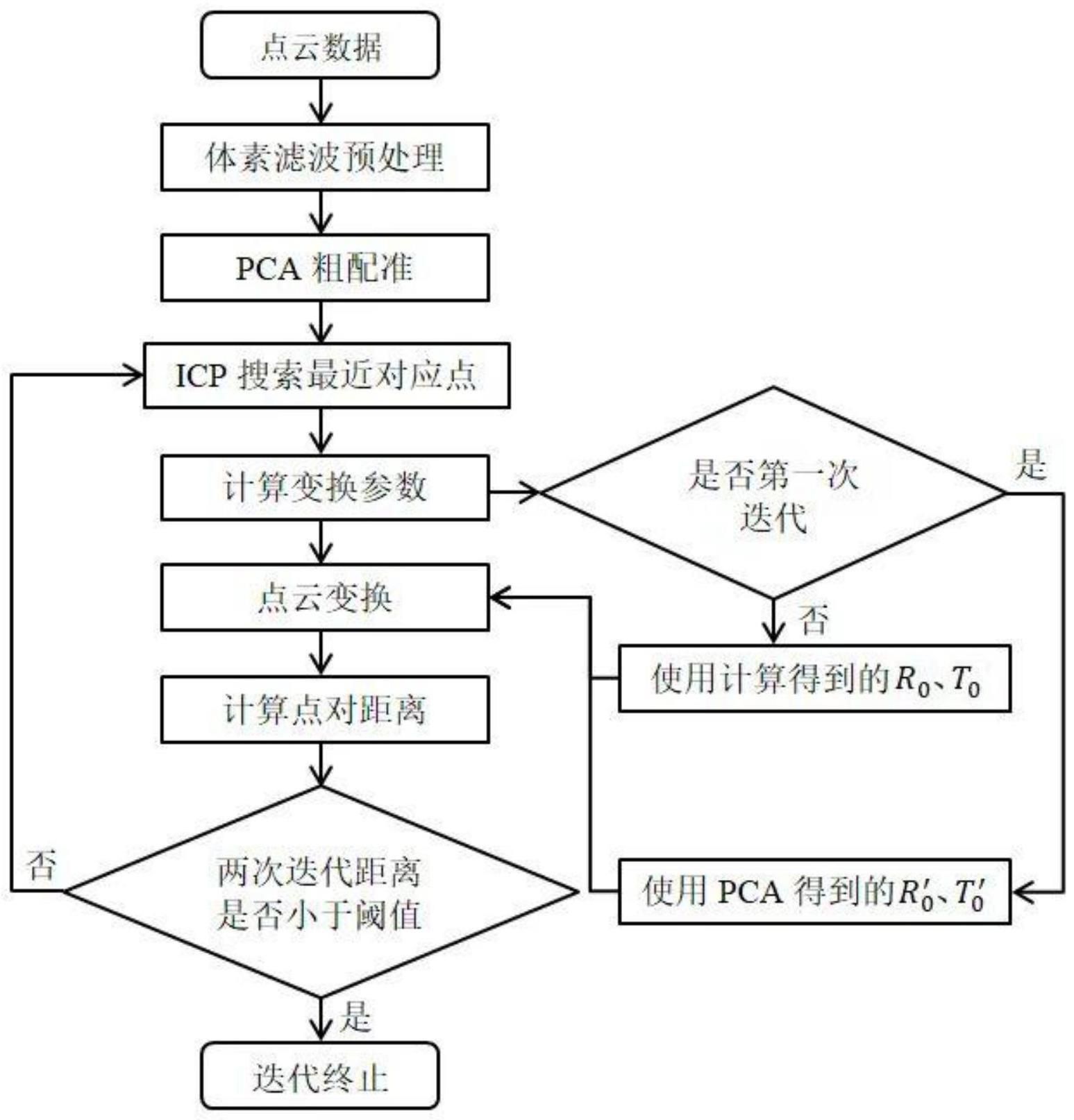
3、步骤1、利用体素滤波方法对点云数据进行预处理以消除冗余数据;
4、步骤2、pca粗配准,即通过计算点云的主方向,然后根据主方向计算得到点云配准的初始值并对初始值进行校正;
5、步骤3、icp精配准,即利用迭代最近点算法对预处理后的点云进行匹配。
6、进一步的,所述步骤1中,体素滤波预处理包括以下步骤:
7、1.1)计算三维点云数据坐标轴上的最大值和最小值;
8、1.2)设计体素小栅格的边长;
9、1.3)根据得到的坐标轴最值计算点云最小包围盒的边长;
10、1.4)计算体素网格的尺寸;
11、1.5)计算每个点云在体素小栅格内的索引;
12、1.6)从大到小排列索引里的元素,并以各体素重心代替其栅格内的所有点;若重心不存在,则用距重心最近的数据点代替栅格内所有点。
13、进一步的,所述步骤2中,点云的主方向计算方法为:
14、2.1)计算2个点云集的协方差阵,通过协方差阵求出点云的主方向;
15、计算两组点云的重心,按以下公式:
16、
17、
18、上式中,表示待匹配点云集p的重心;表示基准点云集m的重心;np表示待匹配点云集p的点云数量,pi表示待匹配点云集p的第i个点云;nm表示基准点云集m的点云数量,mi表示基准点云集m的第i个点云。
19、计算2个点云集间的协方差阵,按以下公式:
20、
21、
22、上式中,t是转置运算符,np、pi、nm、mi、的定义与前面相同。
23、对cp和cm进行奇异值分解,将协方差阵转化为由2组点云的主方向up和um构成的矩阵cp和cm,按以下公式:
24、
25、
26、上式中,t是转置运算符,up表示待匹配点云集p的主方向,um表示基准点云集m的主方向;vp和vm为奇异值分解得到的正交矩阵;dp和dm为降序排列的非负的对角矩阵。
27、进一步的,所述步骤2中,点云配准的初始值计算方法为:利用主方向计算点云集的旋转矩阵的初始值r′0,并通过2个点云集的中心偏移量求出点云集的平移向量的初始值t′0,按以下公式:
28、
29、
30、上式中,up、um、的定义与前面相同。
31、进一步的,所述步骤2中,初始值的校正方法为:
32、利用得到的r′0和t′0对点云进行旋转,得到新的点云集pnew,按以下公式:
33、pnew=p*r′0+t′0
34、上式中,p、r′0、t′0的定义与前面相同。
35、在基准点云集m中搜索pnew的最近距离对应点,得到新的点云集mnew,计算pnew与得到对应点间的距离h,按以下公式:
36、h=pnew-mi
37、上式中,mi的定义与前面相同。
38、计算初始配准误差,按以下公式:
39、erri=h*ht
40、
41、式中,t是转置运算符,erri为第i个对应点间的误差,error为2组点云间的平均均方误差;n,n均表示为点对数量。
42、将主方向矩阵up中3个列向量与目标点云各个轴的方向进行对比,若方向相反,则把相反方向所对应的up的列向量取反,按以下公式:
43、up(i)=-up(i)
44、由于3个轴的方向都会存在正向和反向的情况,因此对应的变换总共有8种情况;分别计算8种情况的平均均方误差error,若error达到最小,即对应的初值r0和t0为正确的初始变换参数,将点云旋转至重合或大致重合的位置,为后续的点云精配准提供初始值。
45、进一步的,所述步骤3包含以下步骤:
46、1)利用体素滤波对待匹配点云集p和基准点云集m进行采样,计算获得精简后的待匹配点云集p′和基准点云集m′;
47、2)icp迭代搜索最近对应点,对于待匹配点云集p′中的每一个点云pi,在基准点云集m′中搜索其对应点mi;
48、3)计算变换参数;对于第1次icp迭代,变换参数直接使用步骤2中pca粗配准获得的r′0和t′0,后续每次icp迭代的变换参数使用前一次icp迭代计算得到的r0和t0;
49、4)实施点云变换;对待匹配点云集p′中的点云pi进行迭代变换得到新的点云集p2;
50、5)计算迭代变换后的点对距离;
51、6)迭代终止判断;若通过变换参数计算得到的pnew和mnew的距离误差小于给定的阈值或超过最大迭代次数时,终止迭代运算,得到配准的点云集p2。
52、本发明还提供一种无须外方位元素支持下的lidar点云与无人机影像多级配准装置,包括:
53、预处理模块,用于对点云数据进行预处理,通过体素滤波方法消除冗余数据;
54、pca粗配准模块,用于计算点云配准的初始值并对初始值进行校正;
55、icp精配准模块,利用迭代最近点算法对预处理后的点云进行匹配。
56、本发明还提供一种存储介质,其上存储有能被处理器执行的计算机程序,所述计算机程序被执行时实现所述无须外方位元素支持下的lidar点云与无人机影像多级配准方法的步骤。
57、本发明具有的有益效果是:本发明结合pca粗配准与icp精配准策略来实现lidar点云与无人机正射影像配准,为去除lidar点云数据中的离群点和噪声点,采用了体素滤波的方法对点云数据进行预处理以消除冗余数据,提高了点云与影像的配准效率。本发明的配准策略在点云与正射影像配准方面获得了较好的配准结果,能满足包含复杂地表地物分布的lidar点云与影像多源数据配准需求。
- 还没有人留言评论。精彩留言会获得点赞!