用于自动驾驶仿真测试的车道线拟合方法及装置与流程
本发明涉及自动驾驶,尤其涉及一种用于自动驾驶仿真测试的车道线拟合方法及装置。
背景技术:
1、自动驾驶要商业化落地,需要经过大量的测试。相较于封闭场地测试和开放道路测试,仿真测试以更低的成本,极高的测试效率,大大地加快了系统测试进程,成为自动驾驶商业化落地重要环节。
2、近年来相关仿真软件快速发展,出现了许多商业和开源的仿真测试工具,以vtd(virtual test drive)和carla为代表,其主要是物理渲染引擎为基础,构建各种传感器模型。虽然在物理引擎等技术的加持下,画面的保真度不断提高,但由于现实世界的复杂性,其传感器模型的置信度仍然有待验证。传感器模型产生的数据,还是无法满足感知算法的验证。
3、为了解决传感器模型精度不足问题,目前业内普遍的做法是在仿真测试环节中短路感知,直接将感知融合后的结果注入给自动驾驶系统,从而验证规划、决策、控制等后续模块,而感知模块的测试则通过其他方式进行。在这种情形下,仿真软件虽然提供了的多种传感器模型,但是往往缺少车道线模型,在建立闭环仿真系统时需要根据测试场景相关联的高精地图进行复杂的二次开发,比如:carla仿真引擎中只提供了车辆压线检测传感器。由于仿真软件缺少车道线模型,仿真软件对于车道线信息获取接口的不完整甚至接口缺失,以及不同仿真软件接口之间的多样性,使得在多平台、多台架仿真测试过程中需要针对不同的平台和台架进行二次开发,这无疑增加了仿真测试的开发成本和系统维护成本。因此,如何在自动驾驶仿真测试时进行车道线拟合以形成车道线模型,是目前亟待解决的技术问题。
技术实现思路
1、本发明提供一种用于自动驾驶仿真测试的车道线拟合方法及装置,用以解决现有技术中存在的上述技术问题。
2、本发明提供一种用于自动驾驶仿真测试的车道线拟合方法,包括:
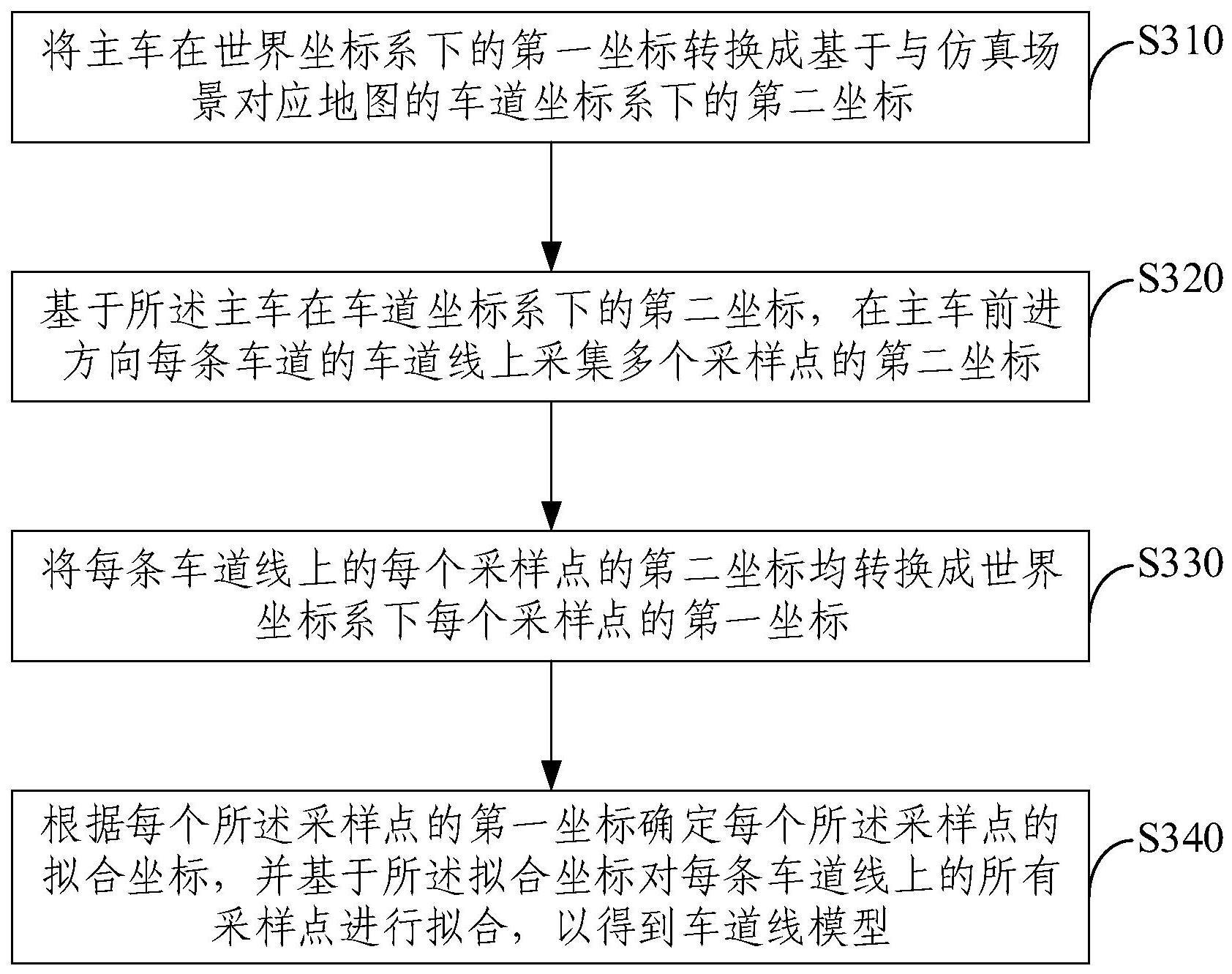
3、将主车在世界坐标系下的第一坐标转换成基于与仿真场景对应地图的车道坐标系下的第二坐标;
4、基于所述主车在车道坐标系下的第二坐标,在主车前进方向每条车道的车道线上采集多个采样点的第二坐标;
5、将每条车道线上的每个采样点的第二坐标均转换成世界坐标系下每个采样点的第一坐标;
6、根据每个所述采样点的第一坐标确定每个所述采样点的拟合坐标,并基于所述拟合坐标对每条车道线上的所有采样点进行拟合,以得到车道线模型。
7、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,基于所述主车在车道坐标系下的第二坐标,在主车前进方向每条车道的车道线上采集多个采样点的第二坐标,包括:
8、获取主车前进方向上的所有车道;
9、对于每条车道在其车道中心线上设置虚拟起点,且在车道坐标系下,使得虚拟起点的第二坐标中距离车道坐标系原点的距离与主车的第二坐标中距离车道坐标系原点的距离相等;
10、对于每条车道,以所述虚拟起点为基准,按预设步长策略中设定的步长沿车道中心线向前确定多个虚拟点,并采集多个虚拟点的第二坐标;
11、对于每条车道,根据每个所述虚拟点的第二坐标和车道宽度确定所述虚拟点两侧车道线上的采样点,以得到每条车道线上多个采样点的第二坐标。
12、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,所述预设步长策略包括:相等步长策略、分段等步长策略或等差递增步长策略;
13、所述相等步长策略为:每次向前移动的步长相等;
14、所述分段等步长策略为:将要采样的车道线总长度分为多个固定区间,每个所述固定区间内步长相等,且离所述虚拟起点越近的固定区间,对应的步长越小;
15、所述等差递增步长策略为:从所述虚拟起点开始移动的步长呈等差数列关系。
16、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,根据每个所述采样点的第一坐标确定每个所述采样点的拟合坐标,并基于所述拟合坐标对每条车道线上的所有采样点进行拟合,以得到车道线模型,包括:
17、将每个所述采样点的第一坐标确定为所述拟合坐标;
18、通过一元拟合函数对每条车道线上的所有采样点的拟合坐标进行拟合,以得到车道线模型。
19、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,根据每个所述采样点的第一坐标确定每个所述采样点的拟合坐标,并基于所述拟合坐标对每条车道线上的所有采样点进行拟合,以得到车道线模型,包括:
20、将每个所述采样点的第一坐标转换到主车坐标系下的第三坐标,将每个所述采样点的第三坐标确定为所述拟合坐标;
21、通过一元拟合函数对每条车道线上的所有采样点的拟合坐标进行拟合,以得到车道线模型。
22、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,还包括:
23、将所述车道线模型,或车道线模型连同每条车道线上的所有采样点的拟合坐标发送至自动驾驶系统。
24、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,在对每条车道线上的所有采样点的拟合坐标进行拟合,以得到车道线模型之后,还包括:
25、对所述车道线模型添加噪声,以得到添加噪声后的车道线模型。
26、根据本发明提供的一种用于自动驾驶仿真测试的车道线拟合方法,还包括:
27、将所述采样点的拟合坐标的x坐标值带入添加噪声后的车道线模型,计算多个采样点的拟合坐标的y坐标值,以得到采样点的新坐标,或根据自动驾驶系统需要的车道线长度l和坐标点个数n,在[0,l]的区间内生成n个新采样点的n个x坐标值,将n个x坐标值带入添加噪声后的车道线模型,计算n个新采样点的n个y坐标值,以得到新采样点的新坐标;
28、将所述添加噪声后的车道线模型,或添加噪声后的车道线模型连同所述新坐标发送至自动驾驶系统。
29、本发明还提供一种用于自动驾驶仿真测试的车道线拟合装置,包括:
30、第一坐标转换模块,用于将主车在世界坐标系下的第一坐标转换成基于与仿真场景对应地图的车道坐标系下的第二坐标;
31、车道线采样模块,用于基于所述主车在车道坐标系下的第二坐标,在主车前进方向每条车道的车道线上采集多个采样点的第二坐标;
32、第二坐标转换模块,用于将每条车道线上的每个采样点的第二坐标均转换成世界坐标系下每个采样点的第一坐标;
33、车道线拟合模块,用于根据每个所述采样点的第一坐标确定每个所述采样点的拟合坐标,并基于所述拟合坐标对每条车道线上的所有采样点进行拟合,以得到车道线模型。
34、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的用于自动驾驶仿真测试的车道线拟合方法。
35、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的用于自动驾驶仿真测试的车道线拟合方法。
36、本发明提供的用于自动驾驶仿真测试的车道线拟合方法及装置,通过将主车在世界坐标系下的第一坐标转换成基于与仿真场景对应地图的车道坐标系下的第二坐标;基于所述主车在车道坐标系下的第二坐标,在主车前进方向每条车道的车道线上采集多个采样点的第二坐标;将每条车道线上的每个采样点的第二坐标均转换成世界坐标系下每个采样点的第一坐标;根据每个所述采样点的第一坐标确定每个所述采样点的拟合坐标,并基于所述拟合坐标对每条车道线上的所有采样点进行拟合,以得到车道线模型。本发明以主车在车道坐标系下的第二坐标为基准采集地图的车道线上的采样点,再将采样点的转换成世界坐标系的第一坐标,根据第一坐标确定每个所述采样点的拟合坐标,并基于所述拟合坐标对每条车道线上的所有采样点进行拟合,以得到车道线模型,从而实现了自动驾驶仿真测试的车道线的拟合,而且本发明是直接对与仿真场景对应的高精度地图上的车道线进行拟合,实现了与仿真软件的解耦,避免了仿真软件对于车道线信息获取接口的不完整甚至接口缺失,以及不同仿真软件接口之间的多样性,使得在多平台、多台架仿真测试过程中需要针对不同的平台和台架进行开发的问题,降低了仿真测试的开发成本和系统维护成本。
- 还没有人留言评论。精彩留言会获得点赞!