一种智能工地安全检测系统及方法与流程
本发明属于工地安全,具体涉及一种智能工地安全检测系统及方法。
背景技术:
1、建筑施工作业过程中,存在着较多安全隐患,安全事故的发生率居高不下。在长期的实践论证中,人工巡检的效率极低,很依赖于现场经验丰富的管理人员,需要他们实时的进行观察和检查,又费时又费力,存在着自动化水平较低、工作量较大和检查项目有限的情况,极容易出现漏检等情况,造成安全隐患。
2、而近年来,图像识别技术取得了重大进展并且已经应用于人脸识别等领域,此外,数据处理也已经广泛应用于安全检测领域。
技术实现思路
1、本发明为了解决上述问题,提出了一种智能工地安全检测系统及方法。
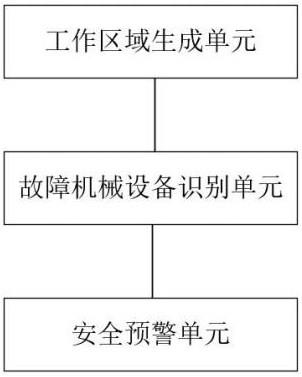
2、本发明的技术方案是:一种智能工地安全检测系统包括工作区域生成单元、故障机械设备识别单元和安全预警单元;
3、工作区域生成单元用于采集施工工地的实时图像,生成施工人员的工作区域;
4、故障机械设备识别单元用于采集工作区域中各个机械设备的运行数据,并根据运行数据确定故障机械设备;
5、安全预警单元对故障机械设备进行安全预警。
6、本发明的有益效果是:该智能工地安全检测系统通过采集施工工地的实时图像生成施工人员的工作区域,通过采集工作区域中各个机械设备的运行数据确定故障机械设备;可准确快速地确定施工工地是否存在安全隐患,并及时进行安全预警。
7、基于以上系统,本发明还提出一种智能工地安全检测方法,包括以下步骤:
8、s1:采集施工工地的实时图像,生成施工人员的工作区域;
9、s2:采集工作区域中各个机械设备的运行数据,并根据运行数据确定故障机械设备;
10、s3:对故障机械设备进行安全预警。
11、进一步地,步骤s1包括以下子步骤:
12、s11:采集施工工地的实时图像,并识别实时图像中施工人员的人脸图像;
13、s12:对人脸图像进行预处理,得到待匹配图像;
14、s13:将待匹配图像与工地数据库的预存人脸图像进行匹配,将匹配通过的待匹配图像所属区域作为施工人员的工作区域。进一步地,步骤s11中,利用裁剪框裁剪实时图像中人脸所在区域,得到人脸图像,其中,人脸图像尺寸大小的计算公式为:式中, x1表示实时图像的长, x2表示实时图像的宽, m表示裁剪框的长, n表示裁剪框的宽, a表示人脸图像的长, b表示人脸图像的宽。
15、进一步地,步骤s12中,对人脸图像进行预处理的具体方法为:对人脸图像进行灰度化处理,并利用拉普拉斯算子对进行灰度化处理后的人脸图像的边缘进行增强处理,得到待匹配图像。
16、进一步地,步骤s13中,将待匹配图像与工地数据库的预存人脸图像进行匹配的具体方法为:将待匹配图像划分为若干个超像素块,在每个超像素块的几何中心设置种子,计算各个种子的像素特征值,根据各个种子的像素特征值计算待匹配图像与预存人脸图像的匹配相似度,若匹配相似度小于设定匹配阈值,则匹配通过,否则匹配不通过,其中,第 i个种子的像素特征值 t i的计算公式为:式中, i表示种子总数, u i表示第 i个种子对应超像素块的灰度值, v表示待匹配图像的灰度值均值;
17、待匹配图像与预存人脸图像的匹配相似度 sim的计算公式为:式中, σ表示超调因子, dis i表示第 i个种子所在几何中心与预存人脸图像几何中心的欧式距离。
18、进一步地,步骤s2包括以下子步骤:
19、s21:采集工作区域中机械设备各个时刻的运行数据,将大于所有运行数据均值的运行数据作为第一待检测运行数据;
20、s22:构建机械故障识别模型;
21、s23:将第一待检测运行数据输入至机械故障识别模型,得到第一故障预测值;
22、s24:判断第一故障预测值是否大于故障阈值,若是,则机械设备故障,否则进入步骤s25:
23、s25:对第一待检测运行数据进行归一化处理,得到第二待检测运行数据;
24、s26:将第二待检测运行数据输入至机械故障识别模型,得到第二故障预测值;
25、s27:根据第一故障预测值和第二故障预测值确定故障机械设备。
26、进一步地,步骤s22中,获取历史故障机械设备的历史运行数据,构建机械故障识别模型 f,其表达式为:式中, ymax表示历史运行数据的最大值, ymin表示历史运行数据的最小值, yave表示历史运行数据的均值, ρ表示机械故障识别模型的权重值, k表示历史运行数据的个数,exp(•)表示指数运算。
27、进一步地,步骤s27中,确定故障机械设备的具体方法为:若第一故障预测值和第二故障预测值之间的均方误差大于设定误差阈值,则机械设备故障,否则机械设备未故障。
28、本发明的有益效果是:
29、(1)该智能工地安全检测方法采集施工工地的实时图像,识别实时图像中的人脸图像,利用人脸图像确定施工工地中存在施工人员的区域,进一步精确安全检测范围,简化工地安全检测流程,避免资源浪费;
30、(2)该智能工地安全检测方法对机械设备的运行数据进行两次排查,在第一次排查中选择异常数据进行检测,若发现机械故障,则不进行第二次排查,尽可能节约检测时间,保证及时预警;第二次排查又可极大地提高机械故障识别的准确率。
技术特征:
1.一种智能工地安全检测系统,其特征在于,包括工作区域生成单元、故障机械设备识别单元和安全预警单元;
2.一种智能工地安全检测方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的智能工地安全检测方法,其特征在于,所述步骤s1包括以下子步骤:
4.根据权利要求3所述的智能工地安全检测方法,其特征在于,所述步骤s11中,利用裁剪框裁剪实时图像中人脸所在区域,得到人脸图像,其中,人脸图像尺寸大小的计算公式为:
5.根据权利要求 3 所述的智能工地安全检测方法,其特征在于,所述步骤 s12 中,对人
6.根据权利要求 3 所述的智能工地安全检测方法,其特征在于,所述步骤 s13 中,将待
7.根据权利要求2所述的智能工地安全检测方法,其特征在于,所述步骤s2包括以下子步骤:
8.根据权利要求7所述的智能工地安全检测方法,其特征在于,所述步骤s22中,获取历史故障机械设备的历史运行数据,构建机械故障识别模型f,其表达式为:式中,ymax表示历史运行数据的最大值,ymin表示历史运行数据的最小值,yave表示历史运行数据的均值,ρ表示机械故障识别模型的权重值,k表示历史运行数据的个数,exp(•)表示指数运算。
9.根据权利要求7所述的智能工地安全检测系统,其特征在于,所述步骤s27中,确定故障机械设备的具体方法为:若第一故障预测值和第二故障预测值之间的均方误差大于设定误差阈值,则机械设备故障,否则机械设备未故障。
技术总结
本发明公开了一种智能工地安全检测系统及方法,其系统包括工作区域生成单元、故障机械设备识别单元和安全预警单元;工作区域生成单元用于采集施工工地的实时图像,生成施工人员的工作区域;故障机械设备识别单元用于采集工作区域中各个机械设备的运行数据,并根据运行数据确定故障机械设备;安全预警单元对故障机械设备进行安全预警。该智能工地安全检测系统可准确快速地确定施工工地是否存在安全隐患,并及时进行安全预警。该智能工地安全检测方法采集施工工地的实时图像,识别实时图像中的人脸图像,利用人脸图像确定施工工地中存在施工人员的区域,进一步精确安全检测范围,简化工地安全检测流程,避免资源浪费。
技术研发人员:袁波,熊刚,沈雄亚,陈科
受保护的技术使用者:中川建投集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!