行人检测方法及装置、存储介质、电子设备与流程
本公开涉及图像处理,具体涉及一种行人检测方法、一种行人检测装置、一种存储介质,以及一种电子设备。
背景技术:
1、行人检测是目标检测中的重要研究课题,并且已经在众多的实际应用场景中进行实际的使用,具有一定的应用价值,例如在无人超市、无人驾驶汽车、智能运输,以及公共区域的监控等应用场景。随着应用场景越来越复杂,现有的行人检测方案也存在一定的缺陷和不足;例如,当出现行人重叠,或者行人与环境中的似人物体(如灯柱)重叠时,便无法准确的检测出每一个行人,出现漏检、误检的情况。因此,如何提供一种检测结果的准确率更高的行人检测方案是本领域技术人员目前需要解决的问题。
2、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开提供一种行人检测方法、一种行人检测装置、一种存储介质,以及一种电子设备,能够在一定程度上解决现有技术中存在的问题。
2、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
3、根据本公开的第一方面,提供一种行人检测方法,所述方法包括:
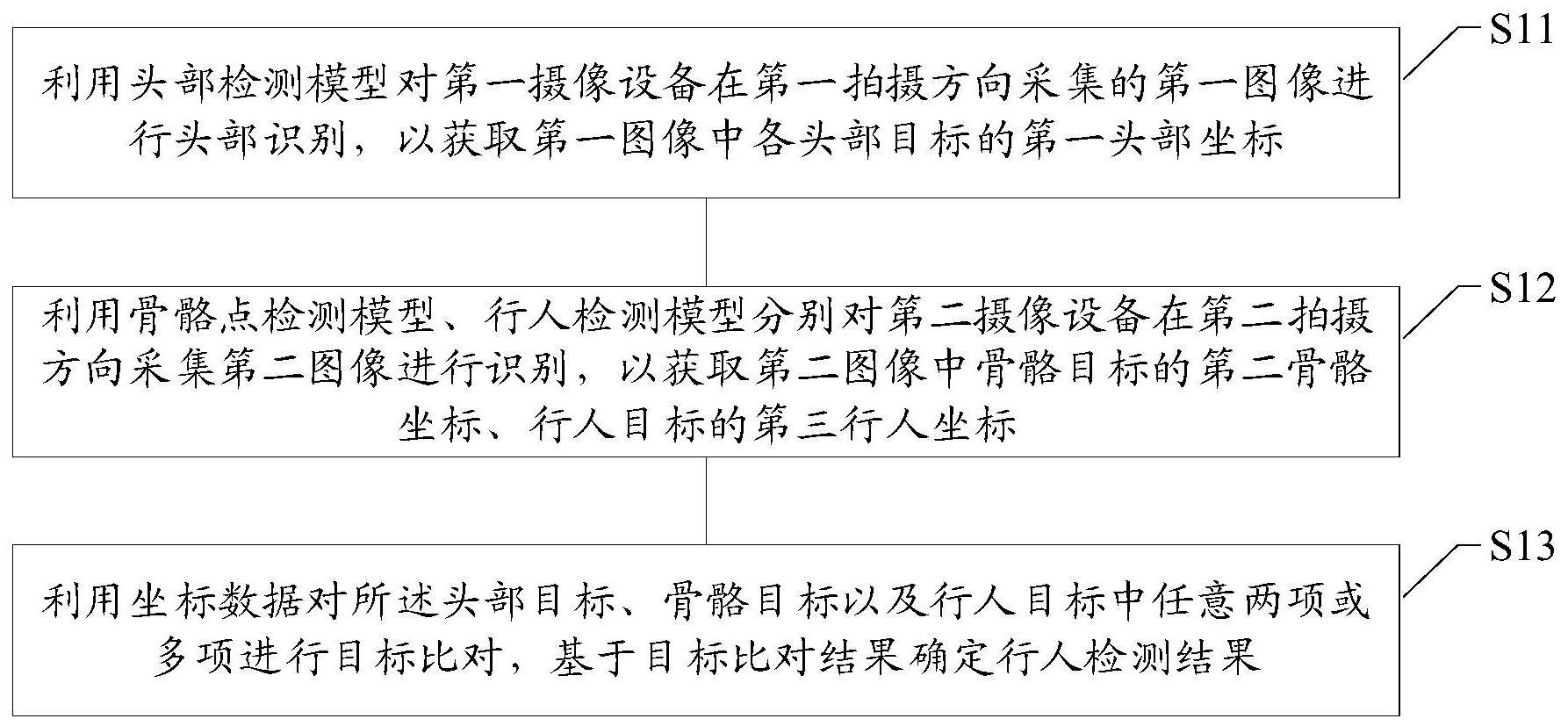
4、利用头部检测模型对第一摄像设备在第一拍摄方向采集的第一图像进行头部识别,以获取第一图像中各头部目标的第一头部坐标;以及,利用骨骼点检测模型、行人检测模型分别对第二摄像设备在第二拍摄方向采集第二图像进行识别,以获取第二图像中骨骼目标的第二骨骼坐标、行人目标的第三行人坐标;
5、利用坐标数据对所述头部目标、骨骼目标以及行人目标中任意两项或多项进行目标比对,基于目标比对结果确定行人检测结果。
6、在一些示例性实施方式中,所述利用坐标数据对所述头部目标、骨骼目标以及行人目标中任意两项或多项进行目标比对,基于目标比对结果确定行人检测结果,包括:
7、基于所述第二图像对应的骨骼目标和行人目标计算对应的iou值,并利用iou值对第二图像中的行人目标进行筛选,获取目标不匹配的第一筛选结果、目标匹配的第二筛选结果;
8、利用所述第一筛选结果中已标记的行人目标的第三行人坐标、所述第一图像对应的头部目标的第一头部坐标进行距离比对,以根据不匹配的比对结果获取第三筛选结果、根据匹配成功的比对结果生成第四筛选结果;
9、根据所述第二筛选结果的已标记的行人目标的第三行人坐标、所述第三筛选结果中已标记的头部目标的第一头部坐标进行距离比对,根据不匹配的比对结果生成第五筛选结果;
10、根据所述第五筛选结果中头部目标的第一头部坐标、所述第一筛选结果中已标记的骨骼目标的第二骨骼坐标进行距离比对,以获取匹配成功的第六筛选结果;
11、基于所述第二筛选结果、第四筛选结果以及第六筛选结果中的至少一项确定所述行人检测结果。
12、在一些示例性实施方式中,所述利用头部检测模型对第一摄像设备在第一拍摄方向采集的第一图像进行头部识别,以获取第一图像中各头部目标的第一头部坐标,包括:
13、基于所述第一摄像设备的第一相机坐标系与目标场地对应的场地坐标系进行坐标系标定,以获取对应的第一转换矩阵;
14、利用头部检测模型对第一摄像设备采集的第一图像进行头部识别,以获取所述第一图像中的头部目标及对应的第一检测框;
15、根据所述第一检测框计算对应的第一相机坐标系下的中心点坐标,并利用所述第一转换矩阵计算对应的场地坐标系下的中心点坐标,并配置为所述第一头部坐标;
16、为各所述头部目标配置对应的身份标识。
17、在一些示例性实施方式中,所述利用骨骼点检测模型对第二摄像设备在第二拍摄方向采集第二图像进行识别,以获取第二图像中骨骼目标的第二骨骼坐标,包括:
18、基于所述第二摄像设备的第二相机坐标系与目标场地对应的场地坐标系进行坐标系标定,以获取对应的第二转换矩阵;
19、利用骨骼点检测模型对第二摄像设备采集的第二图像进行骨骼点检测,以获取所述第二图像中的骨骼目标及对应的第二检测框;
20、在所述骨骼目标中包含头部骨骼时,结合所述头部骨骼的坐标计算所述骨骼目标在第二相机坐标系下的中心点坐标;或者,在所述所述骨骼目标中不包含头部骨骼时,利用各骨骼点坐标的平均值计算所述骨骼目标在第二相机坐标系下的中心点坐标;
21、对所述第二相机坐标系下的中心点坐标利用所述第二转换矩阵计算对应的场地坐标系下的中心点坐标,并配置为所述第二骨骼坐标;
22、为各所述骨骼目标配置对应的身份标识。
23、在一些示例性实施方式中,所述利用行人检测模型对第二摄像设备在第二拍摄方向采集第二图像进行识别,以获取第二图像中行人目标的第三行人坐标,包括:
24、基于所述第二摄像设备的第二相机坐标系与目标场地对应的场地坐标系进行坐标系标定,以获取对应的第二转换矩阵;
25、利用行人检测模型对第二摄像设备采集的第二图像进行行人检测,以获取所述第二图像中的行人目标及对应的第三检测框;
26、根据所述第三检测框的计算对应的第二相机坐标系下的中心点坐标,并利用所述第二转换矩阵计算对应的场地坐标系下的中心点坐标,并配置为所述第三行人坐标;
27、为各所述行人目标配置对应的身份标识。
28、在一些示例性实施方式中,所述方法还包括:所述基于所述第二图像对应的骨骼目标和行人目标计算对应的iou值,并利用iou值对第二图像中的行人目标进行筛选,获取目标不匹配的第一筛选结果、目标匹配的第二筛选结果,包括:
29、利用所述第二图像对应的各骨骼目标的第二检测框、行人目标对应的第三检测框分别计算对应iou值;
30、对于各所述行人目标确定iou值最大的骨骼目标,并在该iou值大于等于第一预设值阈值时,配置该所述行人目标与该所述骨骼目标匹配,并将其添加标记后配置为第二筛选结果;
31、或者,在该iou值小于所述第一预设阈值时,配置该所述行人目标、所述骨骼目标不匹配,将其添加标记后配置为第一筛选结果。
32、在一些示例性实施方式中,所述利用所述第一筛选结果中已标记的行人目标的第三行人坐标、所述第一图像对应的头部目标的第一头部坐标进行距离比对,以根据不匹配的比对结果获取第三筛选结果、根据匹配成功的比对结果生成第四筛选结果,包括:
33、根据所述第一筛选结果中行人目标在场地坐标系的第三行人坐标,与各所述头部目标在场地坐标系的第一头部坐标,分别计算各所述行人目标对应的第三检测框与各头部目标的第一检测框之间的距离;
34、对于各所述行人目标确定检测框距离最小的头部目标,并在检测框距离小于等于第二预设阈值时,配置该所述行人目标与该所述头部目标匹配,并为其添加标记后配置为第四筛选结果;
35、或者,在该检测框距离大于所述第二预设阈值时,配置该所述行人目标、所述头部目标不匹配,将其添加标记后配置为第三筛选结果。
36、在一些示例性实施方式中,所述根据所述第二筛选结果的已标记的行人目标的第三行人坐标、所述第三筛选结果中已标记的头部目标的第一头部坐标进行距离比对,根据不匹配的比对结果生成第五筛选结果,包括:
37、根据所述第三筛选结果中的头部目标对应的第一头部坐标,与所述第二筛选结果中的所述行人目标对应的第三行人坐标,分别计算各所述头部目标对应的第一检测框与各所述行人目标的第三检测框之间的距离;
38、确定所述头部目标对应的检测框距离最小的所述行人目标,并在该检测框距离小于等于第三预设阈值时,配置该所述头部目标与该所述行人目标匹配;
39、或者,在该检测框距离大于所述第三预设阈值时,配置该所述头部目标、所述行人目标不匹配,根据该些不匹配的所述头部目标生成所述第五筛选结果。
40、在一些示例性实施方式中,所述根据所述第五筛选结果中头部目标的第一头部坐标、所述第一筛选结果中已标记的骨骼目标的第二骨骼坐标进行距离比对,以获取匹配成功的第六筛选结果,包括:
41、根据所述第五筛选结果中各头部目标对应的第一头部坐标,与所述第一筛选结果中的所述骨骼目标对应的第二行人坐标,分别计算各头部目标对应的一检测框与各所述骨骼目标对应第二检测框之间的距离;
42、确定所述头部目标对应的检测框距离最小的所述骨骼目标,并在该检测框距离小于等于第四预设阈值时,配置该所述头部目标与该所述骨骼目标匹配,并作为所述第六筛选结果。
43、在一些示例性实施方式中,所述方法还包括:
44、重复执行n次上述的行人检测方法以获取n组目标比对结果;
45、对n组目标比对结果进行统计,若一个目标被标记为行人检测结果的次数大于或等于m,则将该目标标记为行人目标;其中,m、n为正整数。
46、根据本公开的第二方面,提供一种行人检测装置,所述装置包括:
47、第一相机坐标计算模块,用于利用头部检测模型对第一摄像设备在第一拍摄方向采集的第一图像进行头部识别,以获取第一图像中各头部目标的第一头部坐标;
48、第二相机坐标计算模块,用于利用骨骼点检测模型、行人检测模型分别对第二摄像设备在第二拍摄方向采集第二图像进行识别,以获取第二图像中骨骼目标的第二骨骼坐标、行人目标的第三行人坐标;
49、坐标比对模块,用于利用坐标数据对所述头部目标、骨骼目标以及行人目标中任意两项或多项进行目标比对,基于目标比对结果确定行人检测结果。
50、根据本公开的第三方面,提供一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的行人检测方法。
51、根据本公开的第四方面,提供一种电子设备,包括:
52、处理器;以及
53、存储器,用于存储所述处理器的可执行指令;
54、其中,所述处理器配置为经由执行所述可执行指令时实现上述的行人检测方法。
55、本公开的一种实施例所提供的行人检测方法,通过设置在两个不同拍摄方向摄像设备在目标场景采集不同角度下的图像,并对第一方向的第一图像进行头部识别得到头部目标,对第二方向的第二图像分别进行骨骼点检测、行人检测得到对应的骨骼目标、行人目标;可以对骨骼目标和行人目标进行匹配,将头部目标与骨骼目标进行匹配,或者将头部目标、骨骼目标以及行人目标进行交叉匹配和验证,从而可以有效的剔除因人重叠而造成的漏检,并有效的提高人重叠状态下的行人的检出率。从而实现利用不同角度的检测对目标场地内的行人检测结果进行比对和验证,提高检出率,避免漏检、误检的情况。
56、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!