入侵检测方法、装置、非易失性存储介质及计算机设备与流程
本发明涉及图像识别领域,具体而言,涉及一种入侵检测方法、装置、非易失性存储介质及计算机设备。
背景技术:
1、机动车区域入侵指的是机动车不按交通规则行驶,行驶到根据规定不能进入的车道,或者行驶进入该机动车被禁止进入的区域。例如,机动车在早晚高峰的时段在公交车道行驶,或者机动车不按导向行驶,又例如,车辆在人行横道前没有礼让行人,驶入了人行横道标志区,或者车辆驶入了不能进入的非机动车道。上述现象的底层逻辑都是区域入侵。
2、为了监察上述区域入侵现象,通常采用道路上方的摄像头进行拍照取证,当摄像头拍摄的图像中出现车辆侵入禁入区域对应的图像范围时,认定该车辆出现了区域入侵现象。然而,道路上固定的摄像头可能会由于外力发生朝向变化,导致摄像头拍摄的图像对应的区域范围也随之变化,进而导致进行车辆区域入侵判断时出现误判。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种入侵检测方法、装置、非易失性存储介质及计算机设备,以至少解决监控摄像头发生偏转导致无法准确判断车辆是否驶入禁入区域的技术问题。
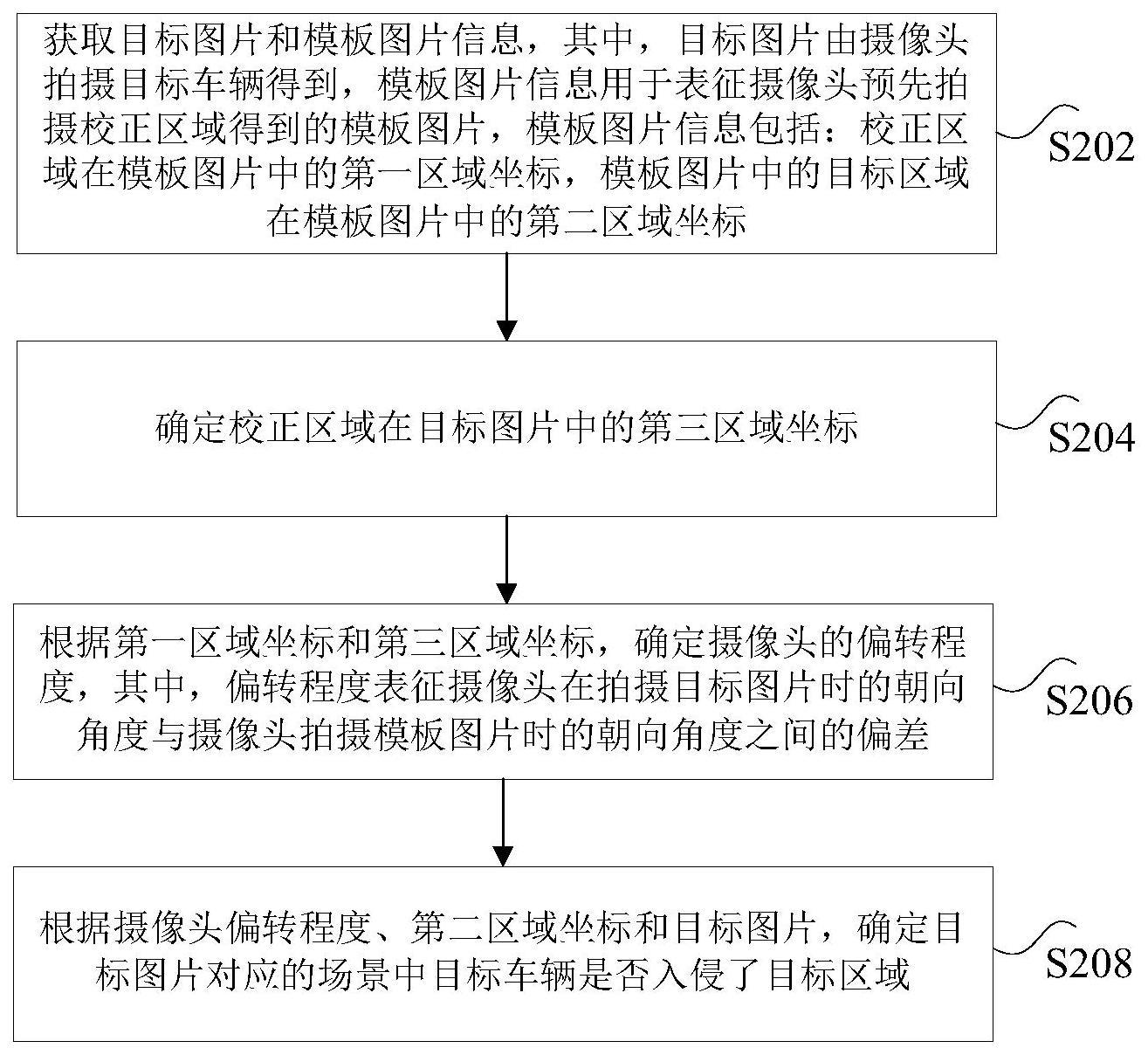
2、根据本发明实施例的一个方面,提供了一种入侵检测方法,包括:获取目标图片和模板图片信息,其中,所述目标图片由摄像头拍摄目标车辆得到,所述模板图片信息用于表征所述摄像头预先拍摄校正区域得到的模板图片,所述模板图片信息包括:所述校正区域在所述模板图片中的第一区域坐标,所述模板图片中的目标区域在所述模板图片中的第二区域坐标;确定所述校正区域在所述目标图片中的第三区域坐标;根据所述第一区域坐标和所述第三区域坐标,确定所述摄像头的偏转程度,其中,所述偏转程度表征所述摄像头在拍摄所述目标图片时的朝向角度与所述摄像头拍摄所述模板图片时的朝向角度之间的偏差;根据所述摄像头偏转程度、所述第二区域坐标和所述目标图片,确定所述目标图片对应的场景中所述目标车辆是否入侵了所述目标区域。
3、可选地,所述根据所述摄像头偏转程度、所述第三区域坐标和所述目标图片,确定所述目标图片中的所述目标车辆是否入侵了所述目标区域,包括:从所述目标图片中识别出所述目标车辆在所述目标图片中的目标车辆坐标;根据所述摄像头偏转程度和所述第二区域坐标,确定所述目标区域在所述目标图片中的第四区域坐标;根据所述目标车辆坐标和所述第四区域坐标,确定在所述目标图片对应的场景中所述目标车辆是否入侵了所述目标区域。
4、可选地,所述从所述目标图片中识别出所述目标车辆在所述目标图片中的目标车辆坐标,包括:从所述目标图片中识别所述目标车辆,得到所述目标车辆的车型、朝向和初始车辆坐标,其中,所述初始车辆坐标表征所述目标车辆占据的地面范围;根据所述目标车辆的车型和朝向,修正所述初始车辆坐标中的顶点坐标,得到所述目标车辆坐标,其中,所述顶点坐标为表征所述目标车辆占据的地面范围中的顶点位置。
5、可选地,所述从所述目标图片中识别出所述目标车辆在所述目标图片中的目标车辆坐标,包括:将所述目标图片输入repvgg模型,得到所述目标车辆,其中,所述repvgg模型为多属性分类模型;确定所述目标车辆在所述目标图片中的目标车辆坐标。
6、可选地,所述确定所述目标车辆在所述目标图片中的目标车辆坐标,包括:在所述目标图片包括多张目标图片的情况下,获取所述repvgg模型输出的与所述多张目标图片一一对应的多组车辆特征,其中,所述多组车辆特征为所述repvgg模型分别从所述多张图片中提取出的所述目标车辆的特征;根据所述多张目标图片和所述多组车辆特征,确定所述目标车辆在所述目标图片中的行驶轨迹;根据所述目标车辆的行驶轨迹,确定所述目标车辆在所述目标图片中的目标车辆坐标,其中,所述目标车辆坐标表征所述目标车辆沿所述行驶轨迹行驶时所驶过的区域范围。
7、可选地,所述确定所述校正区域在所述目标图片中的第三区域坐标,包括:从所述目标图片中识别出偏转标志物,其中,所述偏转标志物用于表征所述校正区域,所述偏转标志物为在所述摄像头拍摄的场景中位置保持固定的物体;确定所述偏转标志物在所述目标图片中占据的图像区域的坐标为所述第三区域坐标。
8、可选地,所述根据所述第一区域坐标和所述第三区域坐标,确定所述摄像头的偏转程度,包括:根据所述第一区域坐标,确定拍摄所述模板图片时所述摄像头相对于所述偏转标志物的第一朝向;根据所述第三区域坐标,确定拍摄所述目标图片时所述摄像头相对于所述偏转标志物的第二朝向;根据所述第一朝向和所述第二朝向,确定所述摄像头的偏转程度。
9、根据本发明实施例的另一方面,还提供了一种入侵检测装置,包括:获取模块,用于获取目标图片和模板图片信息,其中,所述目标图片由摄像头拍摄目标车辆得到,所述模板图片信息用于表征所述摄像头预先拍摄校正区域得到的模板图片,所述模板图片信息包括:所述校正区域在所述模板图片中的第一区域坐标,所述模板图片中的目标区域在所述模板图片中的第二区域坐标;第一确定模块,用于确定所述校正区域在所述目标图片中的第三区域坐标;第二确定模块,用于根据所述第一区域坐标和所述第三区域坐标,确定所述摄像头的偏转程度,其中,所述偏转程度表征所述摄像头在拍摄所述目标图片时的朝向角度与所述摄像头拍摄所述模板图片时的朝向角度之间的偏差;第三确定模块,用于根据所述摄像头偏转程度、所述第二区域坐标和所述目标图片,确定所述目标图片对应的场景中所述目标车辆是否入侵了所述目标区域。
10、根据本发明实施例的又一方面,还提供了一种非易失性存储介质,所述非易失性存储介质包括存储的程序,其中,在所述程序运行时控制所述非易失性存储介质所在设备执行上述任意一项所述入侵检测方法。
11、根据本发明实施例的再一方面,还提供了一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器用于存储程序,所述处理器用于运行所述存储器存储的程序,其中,所述程序运行时执行上述任意一项所述入侵检测方法。
12、在本发明实施例中,采用在摄像头拍摄的图像对应的真实区域中选定校正区域作为偏转校正基准的方式,通过比较摄像头实时拍摄的目标图片中的校正区域在目标图片中的坐标和校正区域在模板图片中的坐标,确定摄像头的偏转程度,基于偏转程度将目标图片和模板图片校正到同一图像坐标系下,达到了准确判断目标图片中的目标车辆是否入侵了目标区域的目的,从而实现了提高区域入侵现象的识别准确率的技术效果,进而解决了监控摄像头发生偏转导致无法准确判断车辆是否驶入禁入区域的技术问题。
技术特征:
1.一种入侵检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述摄像头偏转程度、所述第三区域坐标和所述目标图片,确定所述目标图片中的所述目标车辆是否入侵了所述目标区域,包括:
3.根据权利要求2所述的方法,其特征在于,所述从所述目标图片中识别出所述目标车辆在所述目标图片中的目标车辆坐标,包括:
4.根据权利要求2所述的方法,其特征在于,所述从所述目标图片中识别出所述目标车辆在所述目标图片中的目标车辆坐标,包括:
5.根据权利要求4所述的方法,其特征在于,所述确定所述目标车辆在所述目标图片中的目标车辆坐标,包括:
6.根据权利要求1至5中任意一项所述的方法,其特征在于,所述确定所述校正区域在所述目标图片中的第三区域坐标,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述第一区域坐标和所述第三区域坐标,确定所述摄像头的偏转程度,包括:
8.一种入侵检测装置,其特征在于,包括:
9.一种非易失性存储介质,其特征在于,所述非易失性存储介质包括存储的程序,其中,在所述程序运行时控制所述非易失性存储介质所在设备执行权利要求1至7中任意一项所述入侵检测方法。
10.一种计算机设备,其特征在于,所述计算机设备包括存储器和处理器,所述存储器用于存储程序,所述处理器用于运行所述存储器存储的程序,其中,所述程序运行时执行权利要求1至7中任意一项所述入侵检测方法。
技术总结
本发明公开了一种入侵检测方法、装置、非易失性存储介质及计算机设备。其中,该方法包括:获取摄像头拍摄目标车辆得到的目标图片,以及获取模板图片的模板图片信息,模板图片信息用于表征摄像头预先拍摄校正区域得到的模板图片,模板图片信息包括校正区域在模板图片中的第一区域坐标,模板图片中的目标区域在模板图片中的第二区域坐标;确定校正区域在目标图片中的第三区域坐标;根据第一区域坐标和第三区域坐标,确定摄像头的偏转程度,根据摄像头偏转程度、第二区域坐标和目标图片,确定目标图片对应的场景中目标车辆是否入侵了目标区域。本发明解决了监控摄像头发生偏转导致无法准确判断车辆是否驶入禁入区域的技术问题。
技术研发人员:刘圭圭,李凡平,石柱国
受保护的技术使用者:以萨技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!