基于多源群智感知数据的城市交通速度估计方法
本发明涉及一种交通速度估计方法,特别涉及一种基于多源群智感知数据的城市交通速度估计方法。
背景技术:
1、细粒度大规模城市交通速度估计对城市交通管理和改善具有着重大意义。传统的粗粒度交通速度估计仅基于有限数目的交通传感器对小范围内的路段速度进行计算。如今手机已被越来越多地用于导航目的的,当手机用户使用地图或叫车app时,服务提供商会记录gps坐标。这些路上移动导航数据已成为交通监测和传感的重要数据源,并被广泛应用于交通状态估计。然而,移动导航数据空间覆盖不均匀,通常在热点地区会收集到更多的数据而在郊区则很少或没有数据,无法实现细粒度的交通速度估计。除了通过导航目的获得的移动导航数据外,当用户使用微博、美团等移动应用程序时,涉及到基于位置的服务,而许多路边行人在走路时会同时使用手机。与此同时,当一些行人使用具有基于位置服务的手机应用程序时,他们会随机扫描附近的车辆wifi信号,并报告其当前的位置。我们可以通过行人报告的wifi列表来过滤车辆的wifi信号,并根据路边行人的位置来近似出车辆的位置,获得的数据无需部署任何额外设备同时能够覆盖更多的人行道方面。因此可以融合路测行人数据与路上移动导航数据,以一种低成本且精确的方式获得细粒度大规模城市交通速度估计。
技术实现思路
1、本发明目的在于对现有研究和技术存在的不足之处加以完善与规范化,提出一种基于多源群智感知数据的城市交通速度估计方法。该方法对交通速度估计方法提出整体的数据处理流程,可以促进城市交通规划和管理,具有实用价值。
2、本发明的目的通过以下的技术方案实现:
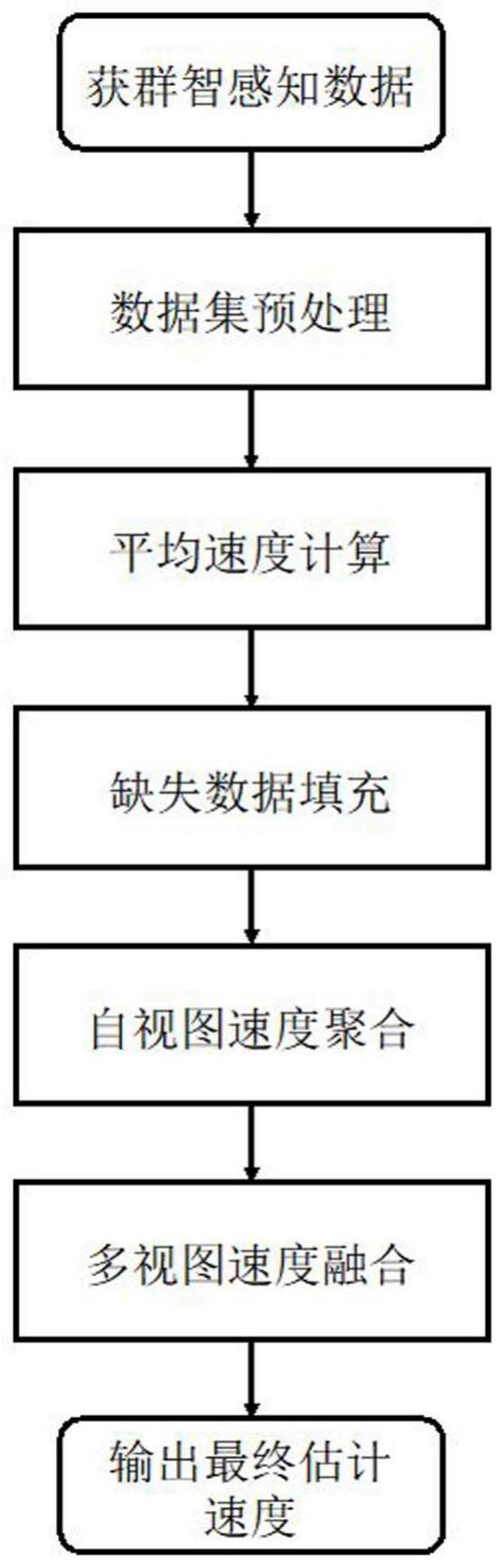
3、一种基于多源群智感知数据的城市交通速度估计方法,包括以下步骤:
4、步骤1,数据集预处理:对智能手机收集的原始数据集进行清洗,分别得到路侧行人数据和路上导航数据;
5、步骤2,平均速度计算:利用步骤1中的数据集计算当前各个路段在不同时间段内的速度x;
6、步骤3,缺失数据填充:利用步骤2中获取的当前各个路段在不同时间段内的速度x,结合历史各个路段在不同时间段内的速度h,对x中的缺失速度数据进行填充,得到填充后的速度
7、步骤4,自视图速度聚合:利用步骤3中计算得到的填充后的速度根据历史速度h量化不同路段间的空间依赖性,集合有用的邻居信息,得到聚合后的路侧行人速度数据vd和路上移动导航速度数据vw;
8、步骤5,多视图速度融合:根据聚合后的路侧行人速度数据vd和路上移动导航速度数据vw,利用多层感知器(mlp),根据时间戳以及当前速度数据是否为填充数据,对多源速度数据进行融合,得到融合速度最终根据道路类型特征对融合速度进行修正,得到细粒度大规模的城市交通速度估计
9、进一步地,所述步骤1具体包括:通过过滤原始数据中的app使用列表,得到路上导航数据,即用户使用高德地图导航、滴滴打车等程序时所上报的个人位置数据,通过过滤原始数据中的扫描wifi信号列表,根据列表内是否存在车载wifi信号,得到路侧行人数据,即用户在使用手机时无意中扫描到了行驶过车辆的wifi信号并上报个人位置时,将路侧行人位置近似看作行驶车辆位置。
10、进一步地,所述步骤2具体包括:利用步骤1清洗过滤得到的数据,利用隐马尔科夫路网匹配算法将轨迹数据投射到路网中,从而获得当前各个路段在不同时间段内的速度x,其中,隐马尔科夫路网匹配算法也称作隐马尔可夫模型地图匹配算法,为公知技术。
11、进一步地,所述步骤3具体包括:首先引入掩码矩阵m代表速度x的缺失单元:
12、
13、其次,利用历史数据建立历史速度矩阵h提供额外的信息帮助填充缺失数据,引入另一个掩码矩阵n代表h的缺失单元:
14、
15、定义一个加权矩阵w来衡量历史速度矩阵h中每个项的重要性,然后,利用h、e、m、n和x进行矩阵分解:
16、
17、
18、
19、之后基于更新后的u+和v+通过矩阵分解构造损失:
20、
21、之后对权重w进行更新:
22、
23、其中,α和β为学习率参数;
24、经过迭代更新,得到一个学习完成的加权矩阵w,我们可以同时使用x和h来估算缺失数据
25、
26、
27、其中,λ表示惩罚项参数,u和v代表原矩阵分解而成的两个子矩阵。
28、进一步地,所述步骤4具体包括:采用自视图速度聚合来捕捉相邻道路之间的空间相关性,聚合与中心路段高度相关的邻居路段信息,首先,根据历史速度矩阵来计算路段i和路段j间的空间相关性ei,j,并且且保留高度相关的部分,忽略不相关信息:
29、
30、
31、之后,根据空间相关性ei,j计算得到了路段间的融合系数ai,j,进而得到自视图聚合后的路侧行人速度数据vd和路上移动导航速度数据vw:
32、
33、
34、其中,ε代表极小的常量,防止溢出,k代表常量缩放值,ni代表路段i的邻接集合,vi,统一代表路侧行人速度数据vd和路上移动导航速度数据vw中的第i行即路段i的特征表示,不再分开赘述。
35、进一步地,所述步骤5具体包括:采用多视图速度融合有效融合多源数据,根据表示时间戳特征以及当前速度数据是否为填充数据特征为fd和fw,之后将特征通过embedding层,并将特征拼接,根据步骤4得到的聚合后的路侧行人速度数据vd和路上导航速度数据vw,通过多层感知器(mlp)得到融合速度
36、z=embedding(concat(fd,fw))
37、
38、最后,根据外部因素(即道路类型)来修正估计的速度,根据历史数据,可以很容易地得到每种类型道路的速度分布,将速度分布看作正态分布,将落在分布尾端的速度进行修正,得到最终估计的速度
39、与现有技术相比,本发明具有以下创新优势及显著效果:
40、1)本发明集成了来自多个来源的数据,融合了路侧行人数据和路上导航数据,实现了路网全路段100%覆盖的速度估计,填充了超过70%的缺失数据,并极大降低了速度估计成本,无需额外安装环路探测器或摄像头等单件金额上万设备;
41、2)本发明针对数据提出规范化处理流程,每个步骤的具体实现方式可以有所变化,具有较强的灵活性与扩展性。
技术特征:
1.一种基于多源群智感知数据的城市交通速度估计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于多源群智感知数据的城市交通速度估计方法,其特征在于,所述步骤1具体包括:通过过滤原始数据中的app使用列表,得到路上导航数据;通过过滤原始数据中的扫描wifi信号列表,根据列表内是否存在车载wifi信号,得到路侧行人数据。
3.根据权利要求1所述的一种基于多源群智感知数据的城市交通速度估计方法,其特征在于,所述步骤2具体包括:利用步骤1清洗过滤得到的数据,利用隐马尔科夫路网匹配算法将轨迹数据投射到路网中,从而获得当前各个路段在不同时间段内的速度x。
4.根据权利要求1所述的一种基于多源群智感知数据的城市交通速度估计方法,其特征在于,所述步骤3具体包括:首先引入掩码矩阵m代表速度x的缺失单元:
5.根据权利要求1所述的一种基于多源群智感知数据的城市交通速度估计方法,其特征在于,所述步骤4具体包括:采用自视图速度聚合来捕捉相邻道路之间的空间相关性,聚合与中心路段高度相关的邻居路段信息,首先,根据历史速度矩阵来计算路段i和路段j间的空间相关性ei,j,并且且保留高度相关的部分,忽略不相关信息:
6.根据权利要求1所述的一种基于多源群智感知数据的城市交通速度估计方法,其特征在于,所述步骤5具体包括:采用多视图速度融合多源速度数据,根据表示时间戳特征是否为填充数据特征为fd,当前速度数据是否为填充数据特征为fw,之后将特征通过embedding层,并将特征拼接,根据步骤4得到的聚合后的路侧行人速度数据vd和路上移动导航速度数据vw,通过多层感知器得到融合速度
技术总结
本发明公开了一种基于多源群智感知数据的城市交通速度估计方法,该方法基于智能手机收集的路侧行人数据和路上导航数据,经过缺失数据填充、自视图速度聚合和多视图速度同和等步骤得到最终的估计速度。本细粒度大规模城市交通速度估计方法能够实现所有类型的道路速度估计,包含了郊区路段与小路,而不是只关注市中心主路。本发明基于数据驱动,无需在道路上安装额外装置,成本低,普适性较强,与现有技术相比,具有更强的实用性、理论性与应用性,对改善交通管理和规划具有重要意义。
技术研发人员:贺诗波,张莹倩,李超,陈积明,方毅,杨秦敏,程鹏
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!