一种激光点云引导的多片精细化密集匹配方法与流程
本发明属于勘测,具体涉及一种激光点云引导的多片精细化密集匹配方法。
背景技术:
1、地理实景三维空间信息是勘察领域及数字孪生领域重要的地理信息承载底图,为实景智慧应用与现实增强服务提供数据底座,为实景中国建设、数字孪生数智生态重要支撑技术手段之一。然而当前实景三维感知手段面临克服高效性与精准性之间矛盾的技术难题,严重阻碍了其技术使命贡献前景,导致勘察领域的数智化建设举步维艰,因此亟需折中解决方案,故在重大需求背景下,实景三维信息的高效、精准的获取手段为重要的勘察行业研究热点之一,也是其它交叉领域迫切需要解决的现实问题。
2、现有的实景信息感知手段主要为被动式影像遥感感知与主动式激光扫描技术。被动式影像遥感感知技术采用多方向二维影像重叠采集,通过多重二维信息重建出实景三维信息,具有采集效率高、成本低、分辨率高等特点,但却受限于二维采集与环境限制,在进行实景三维重建过程中容易出现信息丢失、噪声波动大、重建过程时间长等问题。主动式激光扫描技术则充分弥补了所有遥感影像感知技术的缺点,但是由于精细扫描的设备成本高、采集效率低、实景纹理信息缺失等问题,严重阻碍了其在勘察领域的广泛应用,直到近些年激光扫描设备及技术的成熟,才勉强解决了设备投入成本高的问题,但仍然相对于被动式遥感技术存在不小的亲民性、便捷性、高分辨率、实景感知力等差异性。
3、针对此类问题,《基于lidar点云辅助的立体影像密集匹配方法及系统》[公开号:cn105160702a]提出使用激光点云对立体像对影像进行深度值范围约束,并建立深度值金字塔范围,以减少密集匹配迭代次数,但是这种方法没有考虑影像与激光点云初始误差问题,强行制定的视差会在深度骤变区域出现干扰,另外这两种立体匹配方式存在观测偏差,与多片立体匹配方式存在整体性的效果差异,对密集匹配效果提升有限。
4、《基于全局块优化的立体影像密集匹配方法》[公开号:cn105160702a]提出了一直基于超像素分割约束的最小二乘全局密集匹配方法,用于解决传统立体影像密集匹配算法中普遍存在的“视差阶梯”问题,从而产生高精度密集点云,然而这种方法无法抵抗由于环境光导致的辐射差异,出现超像素约束失败,反而产生逆向噪声影响。
5、《一种基于精确点位预测模型的遥感影像密集匹配方法》[公开号:cn104299228a]提出一种基于层级稀疏匹配点进行逐级预测同名点在不同影像中的位置,从而扩散充满所有影像的深度图,完成密集匹配深度填充,然而这种方式依然只依赖了影像自身的信息,存在信息环境干扰问题,除此之外由于初始的空中三角测量产生的点云密度稀疏,对密集匹配的可靠加速效益有限。
技术实现思路
1、为了弥补现有技术的不足,本发明提供一种激光点云引导的多片精细化密集匹配方法,解决了由于单一数据源产生的数据成果不可靠、质量差及冗余数据叠加与高精度几何信息淹没的问题。
2、为了实现上述目的,本发明所采用的技术方案为:
3、一种激光点云引导的多片精细化密集匹配方法,其特征在于:包括如下步骤:
4、步骤一:按照项目的需求对测区进行勘测,获取测区的基本情况;
5、步骤二:根据现场情况与设计需求,设计协同采集倾斜影像数据与激光点云数据方案;
6、步骤三:采集多源数据,获取适宜分辨率的遥感影像数据与密度分布的高精度激光点云数据;
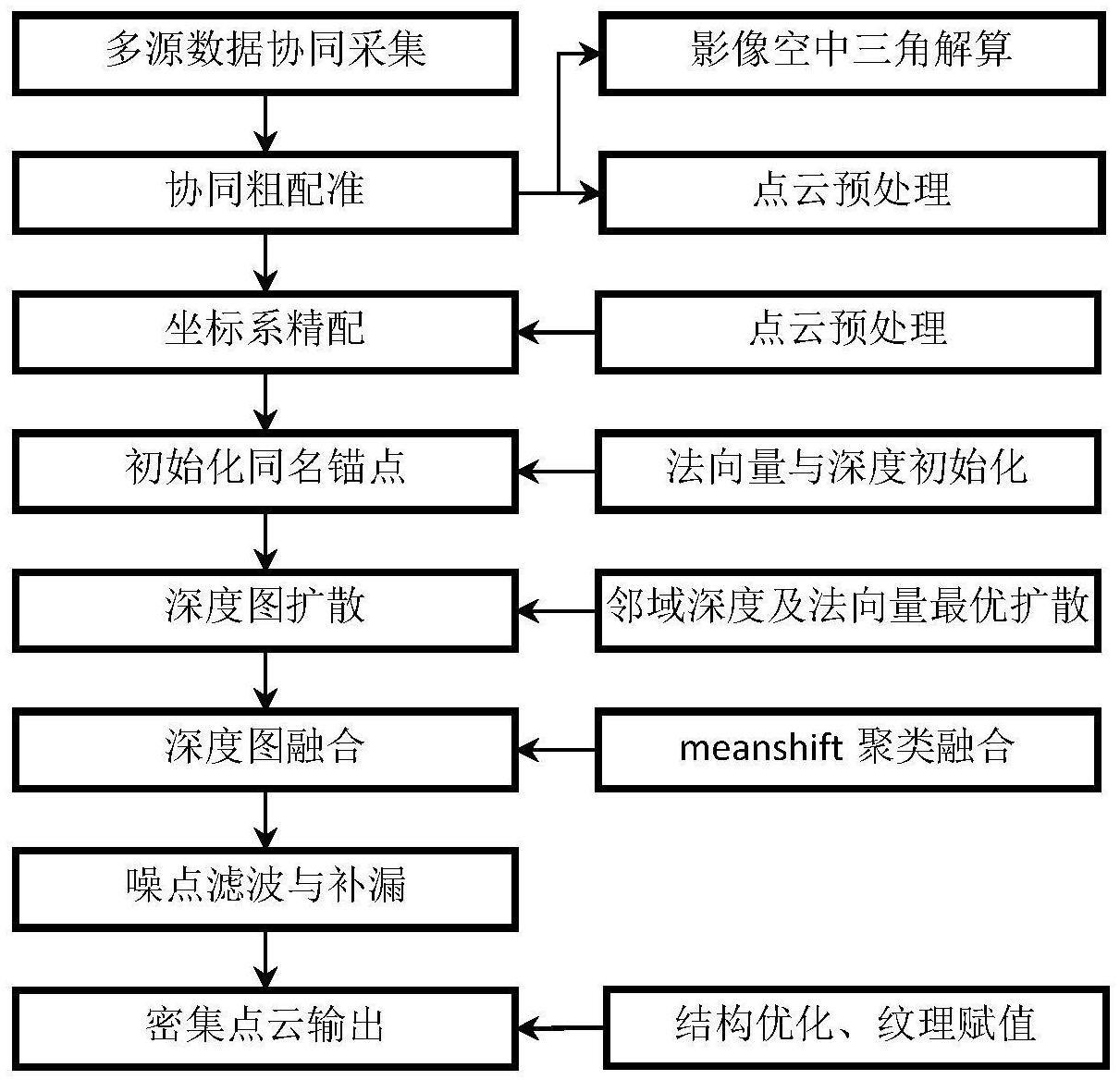
7、步骤四:分别对遥感影像数据进行空中三角测量,获得任意一张影像数据与物方点位的精确映射关系;对激光点云数据进行预处理加工,剔除噪声数据,完成异构数据之间的粗匹配过程;
8、步骤五:通过坐标系精配过程,改正消除抑制异构感知数据系统之间残留的误差;使异构感知数据系统最终残留误差在亚地面分辨率以下;
9、步骤六:初始化同名描点,在每张影像中锚定高精度的激光点云数据;
10、步骤七:深度图扩散,从每张影像的同名锚点位置出发并行扩散填充整幅影像;
11、步骤八:深度图融合,把每张影像对应的深度图在物方进行聚类融合,消除多余观测值;
12、步骤九:噪声滤波与弥补,通过对深度图物方融合结果进行噪声平滑滤波,剔除波动点,然后再反投影至每张深度图中进行弥补因若纹理而产生的空洞;
13、步骤十:密集点云导出。
14、进一步,所述步骤五包括:
15、s5.1:利用激光点云数据在不同影像中投影窗口灰度值信息,对影像空间基准系统与激光点云基准系统进行精确微调,计算出微调转换参数,遥感影像数据与激光点云数据之间的微调转换参数为:
16、
17、
18、式中,f(*)为基准影像的灰度值,g(*)为待匹配影像的灰度值,(x,y)为物方点p在影像中窗口[w×w]内的坐标,可通过影像已知的投影矩阵与相机畸变参数完成确定,(a0,a1,a2,b0,b1,b2,)为匹配系数,l(p)为物方点p在可观测影像集合vp中的灰度值观测误差;
19、
20、t(p)为对物方点p的坐标转换微调变换矩阵,当物方点云坐标系与影像已知坐标系存在偏差则可以通过此预制微调变换矩阵进行改正,e为根据同名点灰度值残差求解匹配系数与坐标转换微调变换矩阵的误差能量函数;
21、s5.2:在对影像空间基准系统与激光点云基准系统进行精确微调过程中采用最小二乘动态匹配调整方法,迭代更新不同同名点窗口在可视影像集合中的互相映射几何变换参数,直至达到最优误差可控范围内,此时对应的数据间空间基准系统转换为最优精配参数。
22、进一步,所述步骤七包括:
23、7.1影像深度图的扩散,在其当前像素点窗口内依次径向初始化未设置深度值的邻域像素点;在邻域范围内对当前像素值提供一个初始化的深度信息与法向量信息,并按照公式(4)计算出其评价值,然后优化求解出当前像素值最优的深度值与法向量值。
24、
25、
26、式中,σy为方差,参考基准影像ir,待匹配影像集合{ii},n(p)为某一物点p在基准影像中邻域集合;diff(x,y)为平滑约束函数,用于衡量观察值之间差异性,为基准影像与待匹配影像之间的互相关函数;d(p)、n(p)为物方点p在基准影像中的深度值与法向量,d(q)、n(q)为物方点q在基准影像中的深度值与法向量;为物方点p在基准影像中的深度值打分评价值;
27、7.2所有非同名锚点的像素都需要通过评价函数迭代进行评价,优化选取最优深度值为当前最佳解。
28、本发明的有益效果:
29、1)本发明充分利用了遥感影像丰富纹理信息与激光雷达高精度点云信息,解决了由于单一数据源产生的数据成果不可靠、质量差等问题;
30、2)本发明提出了一种深度耦合影像信息与激光点云的密集匹配方法,避免了冗余数据叠加与高精度几何信息淹没的问题,同时可以对全局密集过程进行加速,避免出现局部最小值作为最优解的情况;
31、3)本发明针对高效、精准实景三维感知手段技术,在影像感知的基础上,协同融合利用了三维激光扫描技术,使得两种感知数据相互约束弥补先天局限性,并且这种融合是紧耦合方式,避免了非传统松耦合模式带来的尺度与精度分布不均衡的问题,造成了三维激光点云信息利用率不足、实景点云信噪比低、后续构网冗余数据量大等问题。
- 还没有人留言评论。精彩留言会获得点赞!