多目标巡检调度规划方法、装置、电子设备及存储介质与流程
本技术涉及机器人控制,具体而言,涉及一种多目标巡检调度规划方法、装置、电子设备及存储介质。
背景技术:
1、传统的人工巡检存在劳动强度大、巡检效率低、巡检不到位、巡检标准不统一等问题,很难做到客观、全面、准确的评判,给园区、设备的运行埋下安全隐患,而机器人基于更敏锐的动态感应,每次巡检具有定时、定点、定角度的程序化作业特色,因而,巡检安防工作正走向以人工智能技术为依托的“智能巡检”及“立体巡检”。用巡检机器人来代替巡检人员工作,不仅可以提高巡检的工作效率,还解决了巡检质量不高、手段单一的问题,保证了巡检到位率和及时性,大大提高了巡检的便利性。
2、然而,当系统中存在多台巡检机器人,考虑各巡检机器人执行不同任务的能力以及容错能力的不同,如何合理分配和调度巡检机器人,使得系统效率最优成为一个复杂的多目标优化问题。目前,解决该问题的方法包括基于博弈论的协商算法、任务分配的随机策略等,然而,这些方法通常强依赖于通信网络,需要机器人之间进行广泛协调,一旦有部分机器人发生故障,则会导致分配调度过程无法顺利进行。
技术实现思路
1、本技术的目的在于提供一种多目标巡检调度规划方法、装置、电子设备及存储介质,能够对巡检机器人群体系统进行合理的优化分配调度以优化系统效率,而且不强依赖于机器人之间的实时通信协调,具有良好的适应性。
2、第一方面,本技术提供了一种多目标巡检调度规划方法,用于向多个巡检机器人分配巡检任务,包括步骤:
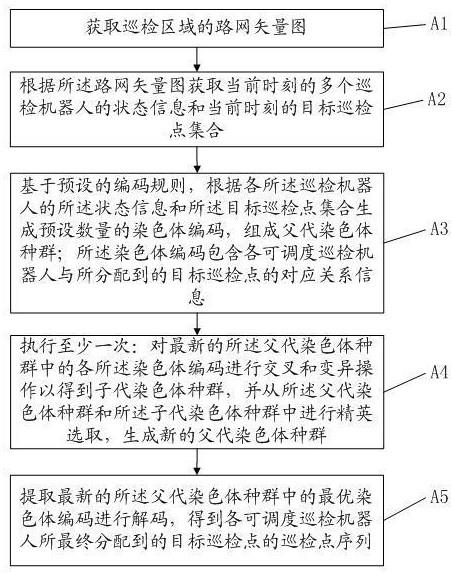
3、a1.获取巡检区域的路网矢量图;
4、a2.根据所述路网矢量图获取当前时刻的多个巡检机器人的状态信息和当前时刻的目标巡检点集合;
5、a3.基于预设的编码规则,根据各所述巡检机器人的所述状态信息和所述目标巡检点集合生成预设数量的染色体编码,组成父代染色体种群;所述染色体编码包含各可调度巡检机器人与所分配到的目标巡检点的对应关系信息;
6、a4.执行至少一次:对最新的所述父代染色体种群中的各所述染色体编码进行交叉和变异操作以得到子代染色体种群,并从所述父代染色体种群和所述子代染色体种群中进行精英选取,生成新的父代染色体种群;
7、a5.提取最新的所述父代染色体种群中的最优染色体编码进行解码,得到各可调度巡检机器人所最终分配到的目标巡检点的巡检点序列。
8、该多目标巡检调度规划方法,通过采用群体智能的多目标进化算法对多个巡检机器人调度过程中存在的多目标复杂优化问题进行求解,以实现巡检任务的分配,能够对巡检机器人群体系统进行合理的优化分配调度以优化系统效率,而且不强依赖于机器人之间的实时通信协调,具有良好的适应性。
9、具体地,所述路网矢量图包含多个路网节点的节点信息;所述节点信息包括本路网节点的节点号、本路网节点的节点坐标、后继节点的节点号以及本路网节点至所述后继节点的航向角。
10、具体地,所述状态信息包括所述巡检机器人的机器人编号、机器人坐标、当前的航向、当前位于所述巡检机器人前侧且与所述巡检机器人最近的所述路网节点的节点号、机器人运行状态和机器人参数;
11、所述机器人运行状态包括空闲状态和故障状态,所述空闲状态为表示空闲的第一状态或表示非空闲的第二状态,所述故障状态为表示故障的第三状态或表示非故障的第四状态;
12、所述机器人参数包括所述巡检机器人的最大移动速度和当前电量;
13、所述目标巡检点为待巡检的所述路网节点,所述目标巡检点集合为所述目标巡检点的所述节点号的集合。
14、优选地,所述可调度巡检机器人是指当前处于所述第一状态和第四状态且当前电量大于预设电量阈值的所述巡检机器人;
15、所述编码规则为:所述染色体编码包括第一部分和第二部分,所述第一部分为所有所述目标巡检点的节点号序列,所述第二部分包括各所述可调度巡检机器人所分配到的所述目标巡检点的巡检点数量数据;在所述第一部分中,分配于同一巡检机器人的所有所述目标巡检点的节点号在所述节点号序列中连续排序形成一个子序列段,且各所述子序列段在所述第一部分中的排序与对应的巡检机器人的所述巡检点数量数据在所述第二部分中的排序相同。
16、仅向空闲、非故障且电量足够的巡检机器人进行任务分配,可保证分配后的任务被全部完成的可靠性,从而提高任务分配结果的合理性;通过该编码规则可以有效地记录各可调度巡检机器人与分配到的目标巡检点的对应关系,便于后续进行快速解码得到分配结果。
17、优选地,步骤a3包括:
18、a301.根据各所述巡检机器人的所述状态信息获取各所述巡检机器人的所述机器人运行状态和所述机器人参数,以确定可调度巡检机器人;
19、a302.基于聚类算法,根据各所述目标巡检点的节点坐标,把所述目标巡检点集合划分为k个子集合, k为可调度巡检机器人的数量;
20、a303.根据各所述子集合的聚类中心与各所述可调度巡检机器人之间的距离,把各所述子集合分配给各所述可调度巡检机器人,并统计各所述子集合的目标巡检点的巡检点数量数据;
21、a304.循环执行以下步骤多次以生成预设数量的所述染色体编码,组成父代染色体种群:对各所述子集合中的目标巡检点的节点号进行随机排列后,合并为一个所述染色体编码的所述第一部分,并用各所述子集合的所述巡检点数量数据组成所述染色体编码的所述第二部分。
22、通过聚类可使相对距离较近的目标巡检点聚类为一个子集合,再根据各子集合的聚类中心与各所述可调度巡检机器人之间的距离,把各所述子集合分配给各所述可调度巡检机器人,有利于保证各可调度巡检机器人以较短的移动路径完成分配到的目标巡检点的巡检工作,从而有利于提高巡检效率。
23、优选地,所述对最新的所述父代染色体种群中的各所述染色体编码进行交叉和变异操作以得到子代染色体种群的步骤,包括循环执行多次的步骤:
24、b1.在最新的所述父代染色体种群中,选取并复制两条染色体编码,分别记为第一染色体编码和第二染色体编码;
25、b2.针对所述第一部分,随机选取两个第一交叉点,并针对所述第二部分,随机选取一个第二交叉点;
26、b3.删除所述第一染色体编码的所述第一部分中不在两个所述第一交叉点之间的片段,并在保证基因互斥性的条件下用所述第二染色体编码的所述第一部分填充所述第一染色体编码的所述第一部分中被删除的片段;根据所述第一染色体编码和所述第二染色体编码的所述第二交叉点的数值,对所述第一染色体编码的所述第二部分进行算术交叉处理;从而由所述第一染色体编码得到所述子代染色体种群的一个染色体编码;
27、b4.删除所述第二染色体编码的所述第一部分中不在两个所述第一交叉点之间的片段,并在保证基因互斥性的条件下用所述第一染色体编码的所述第一部分填充所述第二染色体编码的所述第一部分中被删除的片段;根据所述第一染色体编码和所述第二染色体编码的所述第二交叉点的数值,对所述第二染色体编码的所述第二部分进行算术交叉处理;从而由所述第二染色体编码得到所述子代染色体种群的一个染色体编码;
28、b5.在最新的所述父代染色体种群中,选取并复制一条染色体编码,记为第三染色体编码;
29、b6.针对所述第一部分,随机选取两个第一变异点,并针对所述第二部分,随机选取两个第二变异点;
30、b7.把所述第三染色体编码的所述第一部分中的两个所述第一变异点的位置互相交换;根据所述第三染色体编码的所述第二部分中的两个所述第二变异点的数值,对所述第三染色体编码的所述第二部分进行算术变异处理;从而由所述第三染色体编码得到所述子代染色体种群的一个染色体编码。
31、优选地,所述从所述父代染色体种群和所述子代染色体种群中进行精英选取,生成新的父代染色体种群的步骤包括:
32、c1.把所述父代染色体种群和所述子代染色体种群的集合记为组合种群;
33、c2.根据所述组合种群中的各染色体编码获取所有所述可调度巡检机器人的运行路径长度总和以及各所述可调度巡检机器人的运行时间中的最大值,分别记为全局路径长度和最长运行时间;
34、c3.以全局路径长度最小化和最长运行时间最小化为目标,对所述组合种群进行快速非支配排序处理,得到多个依次排序的非支配集合;
35、c4.根据各所述非支配集合的排序,并考虑各所述非支配集合中的各染色体编码的拥挤度,从各所述非支配集合中选取精英染色体编码,组成规模与所述父代染色体种群的规模相同的新种群,作为新的父代染色体种群。
36、第二方面,本技术提供了一种多目标巡检调度规划装置,用于向多个巡检机器人分配巡检任务,包括:
37、第一获取模块,用于获取巡检区域的路网矢量图;
38、第二获取模块,用于根据所述路网矢量图获取当前时刻的多个巡检机器人的状态信息和当前时刻的目标巡检点集合;
39、第一生成模块,用于基于预设的编码规则,根据各所述巡检机器人的所述状态信息和所述目标巡检点集合生成预设数量的染色体编码,组成父代染色体种群;所述染色体编码包含各可调度巡检机器人与所分配到的目标巡检点的对应关系信息;
40、第二生成模块,用于执行至少一次:对最新的所述父代染色体种群中的各所述染色体编码进行交叉和变异操作以得到子代染色体种群,并从所述父代染色体种群和所述子代染色体种群中进行精英选取,生成新的父代染色体种群;
41、分配模块,用于提取最新的所述父代染色体种群中的最优染色体编码进行解码,得到各可调度巡检机器人所最终分配到的目标巡检点的巡检点序列。
42、该多目标巡检调度规划装置,通过采用群体智能的多目标进化算法对多个巡检机器人调度过程中存在的多目标复杂优化问题进行求解,以实现巡检任务的分配,能够对巡检机器人群体系统进行合理的优化分配调度以优化系统效率,而且不强依赖于机器人之间的实时通信协调,具有良好的适应性。
43、第三方面,本技术提供了一种电子设备,包括处理器和存储器,所述存储器存储有所述处理器可执行的计算机程序,所述处理器执行所述计算机程序时,运行如前文所述多目标巡检调度规划方法中的步骤。
44、第四方面,本技术提供了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如前文所述多目标巡检调度规划方法中的步骤。
45、有益效果:
46、本技术提供的多目标巡检调度规划方法、装置、电子设备及存储介质,通过采用群体智能的多目标进化算法对多个巡检机器人调度过程中存在的多目标复杂优化问题进行求解,以实现巡检任务的分配,能够对巡检机器人群体系统进行合理的优化分配调度以优化系统效率,而且不强依赖于机器人之间的实时通信协调,具有良好的适应性。
- 还没有人留言评论。精彩留言会获得点赞!