一种点云数据的拼接方法、装置、设备及存储介质与流程
本发明涉及人工智能领域,尤其涉及一种点云数据的拼接方法、装置、设备及存储介质。
背景技术:
1、随着计算机技术的快速发展,计算机技术的运用逐渐变得多样化,利用计算机技术实现虚拟现实体验的技术也越来越成熟,虚拟现实技术为人们提供了身临其境的体验。
2、但是目前,在虚拟空间中构建元宇宙模型时,时常会因为点云之间的拼接准确率低,而造成最终生成的模型效果不佳。
技术实现思路
1、本发明提供了一种点云数据的拼接方法、装置、设备及存储介质,用于提高点云数据拼接的准确率。
2、本发明第一方面提供了一种点云数据的拼接方法,所述点云数据的拼接方法包括:
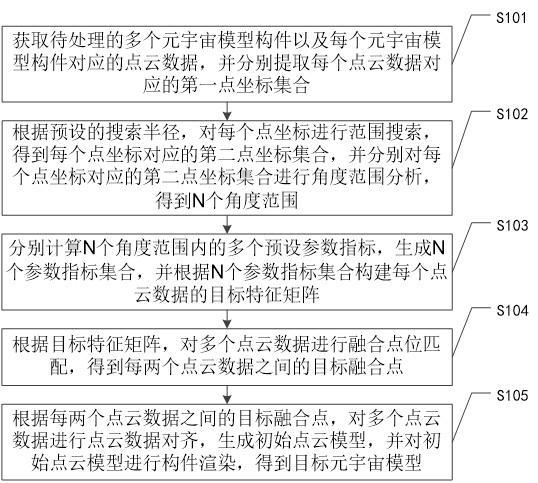
3、获取待处理的多个元宇宙模型构件以及每个元宇宙模型构件对应的点云数据,并分别提取每个点云数据对应的第一点坐标集合;
4、根据预设的搜索半径,对每个点坐标进行范围搜索,得到每个点坐标对应的第二点坐标集合,并分别对每个点坐标对应的第二点坐标集合进行角度范围分析,得到n个角度范围;
5、分别计算所述n个角度范围内的多个预设参数指标,生成n个参数指标集合,并根据所述n个参数指标集合构建每个点云数据的目标特征矩阵;
6、根据所述目标特征矩阵,对所述多个点云数据进行融合点位匹配,得到每两个点云数据之间的目标融合点;
7、根据所述每两个点云数据之间的目标融合点,对所述多个点云数据进行点云数据对齐,生成初始点云模型,并对所述初始点云模型进行构件渲染,得到目标元宇宙模型。
8、结合第一方面,在本发明第一方面的第一实施方式中,所述获取待处理的多个元宇宙模型构件以及每个元宇宙模型构件对应的点云数据,并分别提取每个点云数据对应的第一点坐标集合,包括:
9、获取待处理的多个元宇宙模型构件;
10、分别对所述多个元宇宙模型构件进行三维点云映射,得到每个元宇宙模型构件对应的点云数据;
11、分别提取每个点云数据中的多个点坐标,并根据所述多个点坐标构建每个点云数据对应的第一点坐标集合。
12、结合第一方面,在本发明第一方面的第二实施方式中,所述根据预设的搜索半径,对每个点坐标进行范围搜索,得到每个点坐标对应的第二点坐标集合,并分别对每个点坐标对应的第二点坐标集合进行角度范围分析,得到n个角度范围,包括:
13、根据预设的搜索半径,对每个点坐标进行范围搜索,得到每个点坐标的多个邻近点坐标;
14、根据每个点坐标的多个邻近点坐标构建第二点坐标集合;
15、对所述第二点坐标集合中的多个邻近点坐标进行角度范围划分,得到n个不同的角度范围。
16、结合第一方面,在本发明第一方面的第三实施方式中,所述分别计算所述n个角度范围内的多个预设参数指标,生成n个参数指标集合,并根据所述n个参数指标集合构建每个点云数据的目标特征矩阵,包括:
17、根据所述n个角度范围,提取每个角度范围内的所有坐标点;
18、分别计算每个角度范围内的所有坐标点对应的多个预设参数指标,其中,所述多个预设参数指标包括:法向量差值、距离差值以及法向量与距离的乘积;
19、将所述多个预设参数指标生成每个角度范围内的参数指标集合,得到n个参数指标集合;
20、分别对所述n个参数指标集合进行特征转换,生成每个点云数据的目标特征矩阵。
21、结合第一方面,在本发明第一方面的第四实施方式中,所述根据所述目标特征矩阵,对所述多个点云数据进行融合点位匹配,得到每两个点云数据之间的目标融合点,包括:
22、根据所述目标特征矩阵,分别计算每个点云数据的匹配度;
23、根据每个点云数据的匹配度,对所述多个点云数据进行特征点筛选,得到每个点云数据的至少一个特征点坐标;
24、分别对每个点云数据的至少一个特征点坐标进行融合点位匹配,得到每两个点云数据之间的目标融合点。
25、结合第一方面,在本发明第一方面的第五实施方式中,所述根据所述每两个点云数据之间的目标融合点,对所述多个点云数据进行点云数据对齐,生成初始点云模型,并对所述初始点云模型进行构件渲染,得到目标元宇宙模型,包括:
26、根据所述每两个点云数据之间的目标融合点,对所述多个点云数据进行相对位姿计算,得到每两个点云数据之间的相对位姿;
27、根据每两个点云数据之间的相对位姿,对所述多个点云数据进行点云数据对齐,生成初始点云模型;
28、查询所述多个元宇宙模型构件对应的构件信息;
29、根据所述构件信息,对所述初始点云数据进行构建渲染,并将渲染完成的初始点云模型映射到虚拟操作空间,得到目标元宇宙模型。
30、本发明第二方面提供了一种点云数据的拼接装置,所述点云数据的拼接装置包括:
31、获取模块,用于获取待处理的多个元宇宙模型构件以及每个元宇宙模型构件对应的点云数据,并分别提取每个点云数据对应的第一点坐标集合;
32、搜索模块,用于根据预设的搜索半径,对每个点坐标进行范围搜索,得到每个点坐标对应的第二点坐标集合,并分别对每个点坐标对应的第二点坐标集合进行角度范围分析,得到n个角度范围;
33、计算模块,用于分别计算所述n个角度范围内的多个预设参数指标,生成n个参数指标集合,并根据所述n个参数指标集合构建每个点云数据的目标特征矩阵;
34、匹配模块,用于根据所述目标特征矩阵,对所述多个点云数据进行融合点位匹配,得到每两个点云数据之间的目标融合点;
35、生成模块,用于根据所述每两个点云数据之间的目标融合点,对所述多个点云数据进行点云数据对齐,生成初始点云模型,并对所述初始点云模型进行构件渲染,得到目标元宇宙模型。
36、结合第二方面,在本发明第二方面的第一实施方式中,所述获取模块具体用于:
37、获取待处理的多个元宇宙模型构件;
38、分别对所述多个元宇宙模型构件进行三维点云映射,得到每个元宇宙模型构件对应的点云数据;
39、分别提取每个点云数据中的多个点坐标,并根据所述多个点坐标构建每个点云数据对应的第一点坐标集合。
40、结合第二方面,在本发明第二方面的第二实施方式中,所述搜索模块具体用于:
41、根据预设的搜索半径,对每个点坐标进行范围搜索,得到每个点坐标的多个邻近点坐标;
42、根据每个点坐标的多个邻近点坐标构建第二点坐标集合;
43、对所述第二点坐标集合中的多个邻近点坐标进行角度范围划分,得到n个不同的角度范围。
44、结合第二方面,在本发明第二方面的第三实施方式中,所述计算模块具体用于:
45、根据所述n个角度范围,提取每个角度范围内的所有坐标点;
46、分别计算每个角度范围内的所有坐标点对应的多个预设参数指标,其中,所述多个预设参数指标包括:法向量差值、距离差值以及法向量与距离的乘积;
47、将所述多个预设参数指标生成每个角度范围内的参数指标集合,得到n个参数指标集合;
48、分别对所述n个参数指标集合进行特征转换,生成每个点云数据的目标特征矩阵。
49、结合第二方面,在本发明第二方面的第四实施方式中,所述匹配模块具体用于:
50、根据所述目标特征矩阵,分别计算每个点云数据的匹配度;
51、根据每个点云数据的匹配度,对所述多个点云数据进行特征点筛选,得到每个点云数据的至少一个特征点坐标;
52、分别对每个点云数据的至少一个特征点坐标进行融合点位匹配,得到每两个点云数据之间的目标融合点。
53、结合第二方面,在本发明第二方面的第五实施方式中,所述生成模块具体用于:
54、根据所述每两个点云数据之间的目标融合点,对所述多个点云数据进行相对位姿计算,得到每两个点云数据之间的相对位姿;
55、根据每两个点云数据之间的相对位姿,对所述多个点云数据进行点云数据对齐,生成初始点云模型;
56、查询所述多个元宇宙模型构件对应的构件信息;
57、根据所述构件信息,对所述初始点云数据进行构建渲染,并将渲染完成的初始点云模型映射到虚拟操作空间,得到目标元宇宙模型。
58、本发明第三方面提供了一种点云数据的拼接设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述点云数据的拼接设备执行上述的点云数据的拼接方法。
59、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的点云数据的拼接方法。
60、本发明提供的技术方案中,对每个点坐标进行范围搜索,得到每个点坐标对应的第二点坐标集合,并分别对每个点坐标对应的第二点坐标集合进行角度范围分析,得到n个角度范围;分别计算n个角度范围内的多个预设参数指标,生成n个参数指标集合,并根据n个参数指标集合构建每个点云数据的目标特征矩阵;根据目标特征矩阵,对多个点云数据进行融合点位匹配,得到每两个点云数据之间的目标融合点;根据每两个点云数据之间的目标融合点,对多个点云数据进行点云数据对齐,生成初始点云模型,并对初始点云模型进行构件渲染,得到目标元宇宙模型,本发明通过对多个元宇宙模型构件进行点云数据映射,生成多个点云数据,然后对生成的多个点云数据进行融合点匹配,找到模型构件之间融合的最佳融合点,然后根据最佳融合点进行点云数据对齐,生成目标元宇宙模型,从而提高了点云数据拼接的准确率,提升了智能化穿戴设备的用户体验。
- 还没有人留言评论。精彩留言会获得点赞!