空地协同的果类目标采收决策方法、系统及装置
本发明涉及农业信息化,尤其涉及一种空地协同的果类目标采收决策方法、系统及装置。
背景技术:
1、近年来,市面上出现了各种果类采收机,例如手持式的果类采收机和仿树形包裹式的果类采收机等,这些果类采收机的出现可以提高果类的采收效率,缓解劳动力短缺的问题。
2、但是,现有的果类采收机无法实现对不同成熟度的果类目标的精准采收,采收质量低,而且无法实现对果园中不同产量区域进行差别化的采收任务分配,采收效率提升有限。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种空地协同的果类目标采收决策方法、系统及装置。
2、第一方面,本发明提供一种空地协同的果类目标采收决策方法,包括:
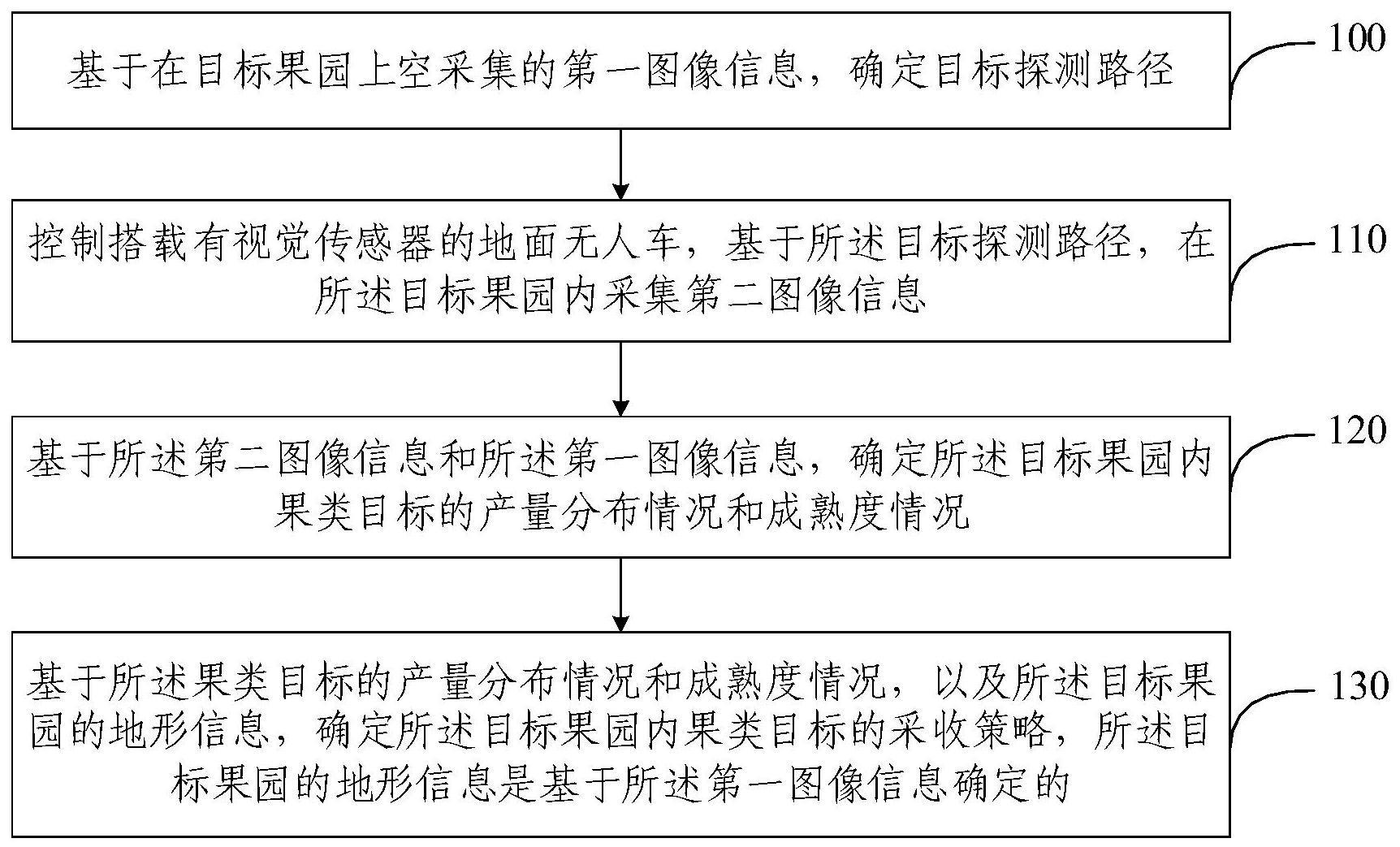
3、基于在目标果园上空采集的第一图像信息,确定目标探测路径;
4、控制搭载有视觉传感器的地面无人车,基于所述目标探测路径,在所述目标果园内采集第二图像信息;
5、基于所述第二图像信息和所述第一图像信息,确定所述目标果园内果类目标的产量分布情况和成熟度情况;
6、基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内果类目标的采收策略,所述目标果园的地形信息是基于所述第一图像信息确定的。
7、可选地,根据本发明提供的一种空地协同的果类目标采收决策方法,所述基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内果类目标的采收策略,包括:
8、基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内各预设区域的果类目标的采收批次、采收所述各预设区域的果类目标所需派发的采收车数量,以及各所述采收车采收所述果类目标的作业路径。
9、可选地,根据本发明提供的一种空地协同的果类目标采收决策方法,所述基于在目标果园上空采集的第一图像信息,确定目标探测路径,包括:
10、基于所述第一图像信息,确定所述目标果园内各果树的位置信息以及所述目标果园的地形信息;
11、基于所述各果树的位置信息和所述目标果园的地形信息,确定所述目标探测路径。
12、可选地,根据本发明提供的一种空地协同的果类目标采收决策方法,所述方法还包括:
13、基于所述目标果园内果类目标的采收策略,派发采收车在所述目标果园内进行采收作业。
14、第二方面,本发明还提供一种空地协同的果类目标采收决策系统,包括:
15、搭载有视觉传感器的无人机、搭载有视觉传感器的地面无人车和地面站管理平台;
16、所述无人机用于基于所述地面站管理平台发送的拍摄指令,在目标果园的上空采集第一图像信息,并将所述第一图像信息发送给所述地面站管理平台;
17、所述地面无人车用于基于所述地面站管理平台确定的目标探测路径,在所述目标果园内采集第二图像信息,并将所述第二图像信息发送给所述地面站管理平台;
18、所述地面站管理平台用于基于所述第一图像信息,确定所述目标探测路径,并将所述目标探测路径发送给所述地面无人车,还用于基于所述第二图像信息和所述第一图像信息,确定所述目标果园内果类目标的产量分布情况和成熟度情况,并基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内果类目标的采收策略,所述目标果园的地形信息是基于所述第一图像信息确定的。
19、可选地,根据本发明提供的一种空地协同的果类目标采收决策系统,所述地面站管理平台具体用于:
20、基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内各预设区域的果类目标的采收批次、采收所述各预设区域的果类目标所需派发的采收车数量,以及各所述采收车采收所述果类目标的作业路径。
21、可选地,根据本发明提供的一种空地协同的果类目标采收决策系统,所述地面站管理平台还具体用于:
22、基于所述第一图像信息,确定所述目标果园内各果树的位置信息以及所述目标果园的地形信息;
23、基于所述各果树的位置信息和所述目标果园的地形信息,确定所述目标探测路径。
24、可选地,根据本发明提供的一种空地协同的果类目标采收决策系统,所述系统还包括采收车控制器和采收车;
25、所述采收车控制器用于基于所述地面站管理平台确定的所述目标果园内果类目标的采收策略,派发所述采收车在所述目标果园内进行采收作业。
26、第三方面,本发明还提供一种空地协同的果类目标采收决策装置,包括:
27、第一确定模块,用于基于在目标果园上空采集的第一图像信息,确定目标探测路径;
28、图像采集模块,用于控制搭载有视觉传感器的地面无人车,基于所述目标探测路径,在所述目标果园内采集第二图像信息;
29、第二确定模块,用于基于所述第二图像信息和所述第一图像信息,确定所述目标果园内果类目标的产量分布情况和成熟度情况;
30、第三确定模块,用于基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内果类目标的采收策略,所述目标果园的地形信息是基于所述第一图像信息确定的。
31、第四方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如第一方面所述空地协同的果类目标采收决策方法。
32、本发明提供的空地协同的果类目标采收决策方法、系统及装置,通过首先基于在目标果园上空采集的第一图像信息,为地面无人车确定目标探测路径,进而控制搭载有视觉传感器的地面无人车基于该目标探测路径在目标果园内采集第二图像信息,然后基于第二图像信息和第一图像信息,确定目标果园内果类目标的产量分布情况和成熟度情况,最后基于果类目标的产量分布情况和成熟度情况,以及目标果园的地形信息,确定目标果园内果类目标的采收策略,则根据该采收策略可以实现对不同产量分布和不同成熟度的果类目标的精准、高效地自动化采收。
技术特征:
1.一种空地协同的果类目标采收决策方法,其特征在于,包括:
2.根据权利要求1所述的空地协同的果类目标采收决策方法,其特征在于,所述基于所述果类目标的产量分布情况和成熟度情况,以及所述目标果园的地形信息,确定所述目标果园内果类目标的采收策略,包括:
3.根据权利要求1所述的空地协同的果类目标采收决策方法,其特征在于,所述基于在目标果园上空采集的第一图像信息,确定目标探测路径,包括:
4.根据权利要求1-3任一项所述的空地协同的果类目标采收决策方法,其特征在于,所述方法还包括:
5.一种空地协同的果类目标采收决策系统,其特征在于,包括:
6.根据权利要求5所述的空地协同的果类目标采收决策系统,其特征在于,所述地面站管理平台具体用于:
7.根据权利要求5所述的空地协同的果类目标采收决策系统,其特征在于,所述地面站管理平台还具体用于:
8.根据权利要求5-7任一项所述的空地协同的果类目标采收决策系统,其特征在于,所述系统还包括采收车控制器和采收车;
9.一种空地协同的果类目标采收决策装置,其特征在于,包括:
10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至4任一项所述空地协同的果类目标采收决策方法。
技术总结
本发明提供一种空地协同的果类目标采收决策方法、系统及装置,涉及农业信息化技术领域,所述方法包括:基于在目标果园上空采集的第一图像信息,确定目标探测路径;控制搭载有视觉传感器的地面无人车,基于目标探测路径,在目标果园内采集第二图像信息;基于第二图像信息和第一图像信息,确定目标果园内果类目标的产量分布情况和成熟度情况;基于果类目标的产量分布情况和成熟度情况,以及目标果园的地形信息,确定目标果园内果类目标的采收策略。本发明通过基于果类目标的产量分布情况和成熟度情况,以及目标果园的地形信息确定目标果园内果类目标的采收策略,可以实现对不同产量分布和不同成熟度的果类目标的精准、高效地自动化采收。
技术研发人员:张林焕,张瑞瑞,陈立平,伊铜川,吴明齐,郭志强
受保护的技术使用者:北京市农林科学院智能装备技术研究中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!