一种铁路油罐车罐口识别定位方法与流程
本发明涉及图像处理,具体涉及一种铁路油罐车罐口识别定位方法。
背景技术:
1、铁路运输具有机动灵活、流向范围广、安全可靠、受自然因素影响小等优点,现如今全国60%~70%成品油都由铁路运输完成输送和转运。铁路油罐车(也称槽车)是散装油品铁路运输的专用车辆,由罐体及其附件、底架、转向架、自动装置、牵引缓冲装置等组成。为了在原油装卸以及运输过程中减少泄漏和挥发,最大限度节约原油、保护环境、保障安全,在装卸过程中需要使用鹤管装卸,所以在鹤管安装对接时需要对铁路油罐车的罐口进行定位。
2、然而,为了满足输油环境的防爆要求,一般采用无接触测量方式对铁路油罐车的罐口进行定位。
3、现有技术中的对铁路油罐车罐口进行识别的方法主要基于模板匹配,将疑似罐口位置与不同车型的罐口模板根据相似度逐个进行匹配,进而确定罐口位置,然而,由于铁路油罐车装车在半露天环境下昼夜进行,所以常常会遇到夜晚时需要额外进行照明的情况,但是灯光的位置和灯光对应的物体阴影往往会对罐口的识别造成影响,所以,现有技术对罐口进行识别的精度并不高。
技术实现思路
1、本发明提供一种铁路油罐车罐口识别定位方法,以解决现有的对罐口进行识别的精度不高的问题。
2、本发明的一种铁路油罐车罐口识别定位方法采用如下技术方案:
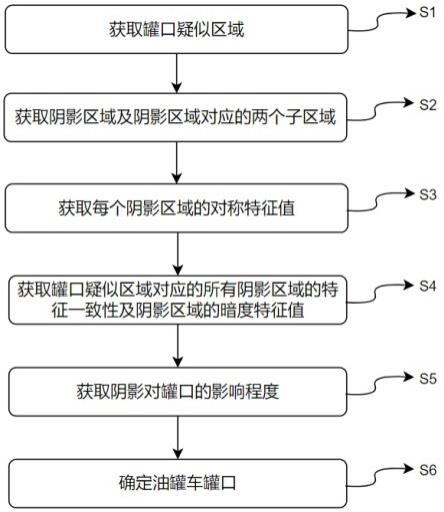
3、获取图像采集设备在初始位置时所采集的铁路油罐车的表面灰度图像,并获取表面灰度图像中的罐口疑似区域;
4、获取罐口疑似区域相邻的阴影区域,获取每个阴影区域的主成分方向,获取阴影区域对应的边缘线的两个端点之间连线,过连线的中心点作沿主成分方向的直线,直线将阴影区域分为两个子区域;
5、根据每个子区域对应的边缘线段上的像素点到直线的欧氏距离,获取每个阴影区域关于直线的对称性及该阴影区域的规则性;根据每个阴影区域对应的对称性、规则性获取每个阴影区域的对称特征值;
6、根据罐口疑似区域相邻的所有阴影区域的对称特征值相似性及所有阴影区域的主成分方向的方向相似性,获取罐口疑似区域对应的所有阴影区域的特征一致性;
7、根据阴影区域的灰度均值及其相邻的罐口疑似区域的灰度均值,获取阴影区域的暗度特征值;
8、根据罐口疑似区域相邻的所有阴影区域的对称特征值、暗度特征值,以及罐口疑似区域对应的所有阴影区域的特征一致性,获取阴影对罐口的影响程度;
9、判断获取的阴影对罐口的影响程度是否符合设定条件,当阴影对罐口的影响程度符合设定条件时,将该初始位置上获取的罐口疑似区域确定为油罐车罐口;
10、当获取的阴影对罐口的影响程度不符合设定条件时,调整图像采集设备的初始位置,直至获取调整位置后得到的罐口疑似区域中的阴影对罐口的影响程度符合设定条件时,停止调节,将调节位置后获得的铁路油罐车的表面灰度图像中的罐口疑似区域确定为油罐车罐口。
11、优选的,获取每个阴影区域关于直线的对称性,包括:
12、根据阴影区域的每个子区域对应的边缘线段上的所有像素点到直线的欧氏距离,获取每个边缘线段对应的距离序列;
13、将两个距离序列的动态时间弯曲距离作为阴影区域关于直线的对称性。
14、优选的,获取每个阴影区域的规则性,包括:
15、根据阴影区域对应的距离序列中每两个相邻的欧氏距离获取距离增长速度;
16、对阴影区域对应的两个距离序列进行突变检测,得到每个距离序列对应的突变点;
17、将阴影区域对应的两个距离序列中负距离增长速度的个数,与所有突变点的个数之和作为阴影区域的规则性。
18、优选的,获取每个阴影区域的对称特征值,包括:
19、对阴影区域关于直线的对称性进行负相关计算得到目标对称性;
20、将目标对称性作为分子,将阴影区域的规则性与防零系数之和作为分母,得到阴影区域的对称特征值。
21、优选的,获取罐口疑似区域相邻的所有阴影区域的对称特征值相似性,包括:
22、根据罐口疑似区域相邻的所有阴影区域的对称特征值,获取特征分布散点图;
23、对特征分布散点图中的散点进行聚类,得到散点数量最多的目标聚类簇;
24、将目标聚类簇的散点数量作为罐口疑似区域相邻的所有阴影区域的对称特征值相似性。
25、优选的,获取罐口疑似区域相邻的所有阴影区域的主成分方向的方向相似性,包括:
26、将目标聚类簇内的散点对应的每个阴影区域的直线作为目标直线;
27、获取每个目标直线与水平方向的夹角,与所有目标直线与水平方向的夹角均值的差值,并将差值的绝对值的和值作为罐口疑似区域相邻的所有阴影区域的主成分方向的方向相似性。
28、优选的,获取罐口疑似区域对应的所有阴影区域的特征一致性,包括:
29、将罐口疑似区域相邻的所有阴影区域的对称特征值相似性,与罐口疑似区域相邻的所有阴影区域的主成分方向的方向相似性的比值,作为罐口疑似区域对应的所有阴影区域的特征一致性。
30、优选的,获取阴影对罐口的影响程度,包括:
31、获取目标聚类簇的散点对应所有阴影区域的对称特征值和值,与罐口疑似区域对应的对称特征值相似性的第一比值,并作为罐口疑似区域对应的目标聚簇的所有影响区域的显著对称特征值;
32、获取目标聚类簇的散点对应所有阴影区域的暗度特征值和值,与罐口疑似区域对应的对称特征值相似性的第二比值,并作为罐口疑似区域对应的目标聚簇的所有影响区域的显著暗度特征值;
33、将显著对称特征值、显著暗度特征值以及罐口疑似区域对应的所有阴影区域的特征一致性的乘积作为阴影对罐口的影响程度。
34、优选的,调整图像采集设备的初始位置,包括:
35、根据罐口疑似区域相邻的所有阴影区域对应的直线对应的夹角获取图像采集设备的移动方向,设定移动步长;
36、按照图像采集设备移动方向和移动步长,移动图像采集设备。
37、优选的,获取图像采集设备的移动方向,包括:
38、获取罐口疑似区域相邻的所有阴影区域的直线对应的夹角均值;
39、并将罐口疑似区域相邻的所有阴影区域的直线对应的夹角均值,作为图像采集设备移动方向。
40、本发明的一种铁路油罐车罐口识别定位方法的有益效果是:
41、通过获取表面灰度图像中的罐口疑似区域,然后基于罐口疑似区域获取影响罐口定位的阴影区域,由于阴影区域是受倾斜光导致的物体出现影子形成的阴影区域,对阴影区域进行分析,受倾斜光导致的物体出现影子形成的阴影区域,其具有对称性和规则性,故以阴影区域对应的对称性、规则性获取每个阴影区域的对称特征值,然后,阴影区域相对于罐口疑似区越暗,则阴影区域对应的暗度特征值就越大,即阴影区域越可能为受倾斜光导致的物体出现影子形成的阴影区域,故阴影区域的灰度均值及其相邻的罐口疑似区域的灰度均值,获取阴影区域的暗度特征值,基于暗度特征值、对称特征值使得实现对阴影区域的判断,然而,由于灌口表面附近无法保证完全干净,常常会沾有油污,油污同样可能有暗度特征、对称特征,故利用暗度特征值,基于暗度特征值来分析,其结果并不准确,由于物体影子同向性的特征,故基于罐口疑似区域相邻的所有阴影区域的对称特征值相似性及所有阴影区域的主成分方向的方向相似性,获取罐口疑似区域对应的所有阴影区域的特征一致性,故基于阴影区域的暗度特征值、对称特征值及罐口疑似区域对应的所有阴影区域的特征一致性,来综合获取由于受倾斜光导致的物体出现影子形成的阴影区域的阴影对罐口的影响程度,通过对称特征值实现对阴影区域的形态进行限定、暗度特征值实现排除表面物体的干扰、阴影区域的特征一致性实现对阴影区域的方向的限定,从而实现阴影对罐口的影响程度的精确获取,然后基于精确获取的阴影对罐口的影响程度,调整图像采集设备位置,使得采集的图像能尽可能正对罐口,进而排除光照对罐口定位的影响,提高罐口定位的准确性。
- 还没有人留言评论。精彩留言会获得点赞!