车辆环境监测方法、装置、设备及存储介质与流程
本发明涉及车辆,尤其涉及一种车辆环境监测方法、装置、设备及存储介质。
背景技术:
1、近几年来,随着汽车智能化的不断发展,车企开始在汽车上使用一些科技来辅助驾驶安全,由于道路情况和驾驶员状况是复杂多样的,单凭驾驶员的操作和意识来防止事故的发生比较困难,所以采用汽车辅助安全手段具有一定的意义。商用车的安全辅助方法一般是在车身加装摄像头,将汽车附近的图像实时传输到车载屏幕上,驾驶员在观察后视镜和左右视镜的同时观察车载屏幕来了解车周围环境情况,做出判断。问题在于,驾驶员所需要观察的项目越多,容易分散精力,车载屏幕和视镜的观察角度兼容度不高,在切换观察视角的时间段内,车身周围盲区发生变化,驾驶员可能会遗漏信息,从而有事故风险,并且车载摄像头采集到的画面存在失真,使得驾驶员无法通过车载屏幕准确地观察道路情况,即现有技术无法有效地对采集到的车辆周围的环境图像进行处理,导致无法准确地对车辆周围进行监测,使得车辆驾驶员无法及时地应对道路情况。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种车辆环境监测方法、装置、设备及存储介质,旨在解决现有技术无法有效地对采集到的车辆周围的环境图像进行处理,导致无法准确地对车辆周围进行监测,使得车辆驾驶员无法及时地应对道路情况的技术问题。
2、为实现上述目的,本发明提供了一种车辆环境监测方法,所述方法包括以下步骤:
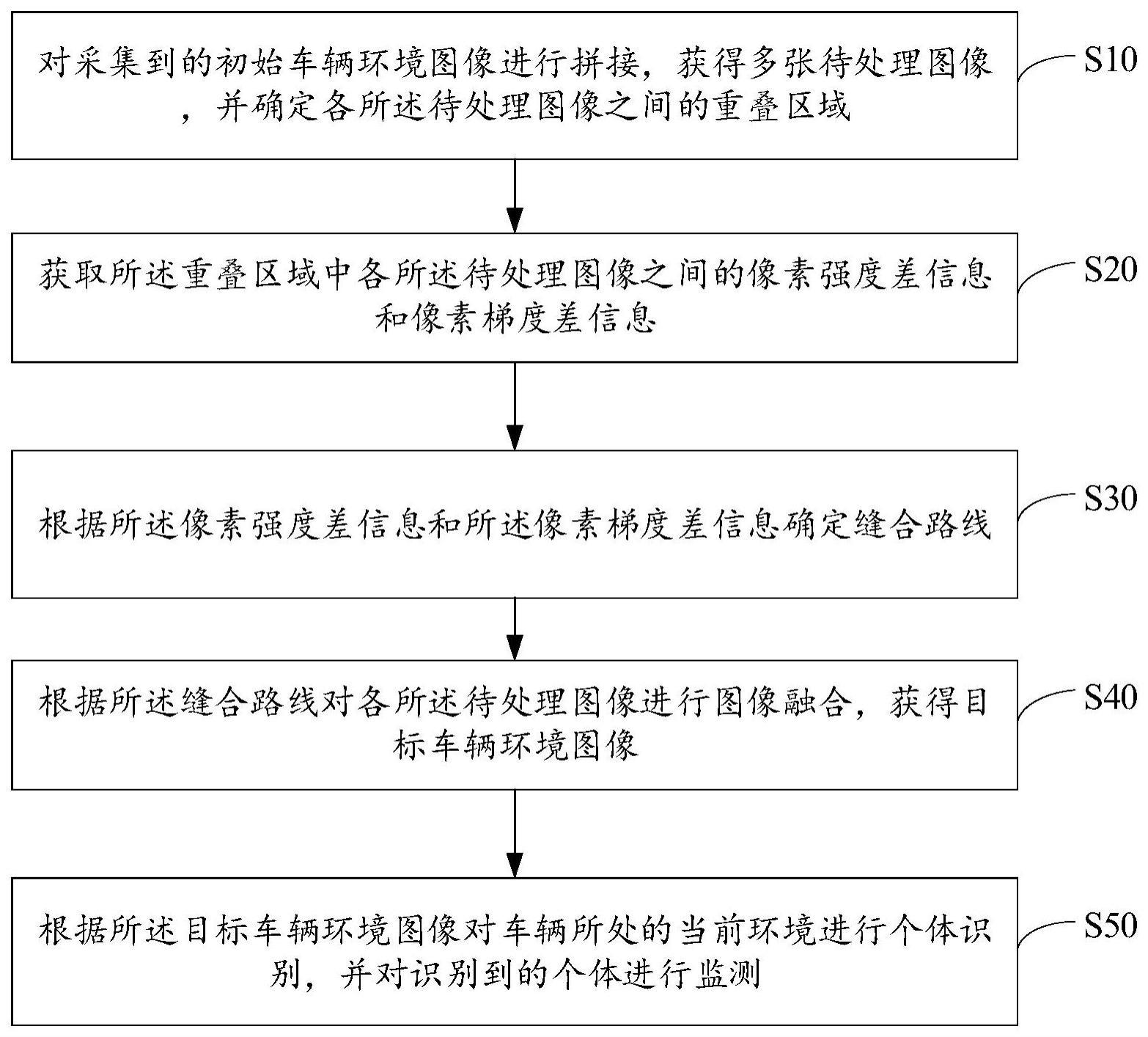
3、对采集到的初始车辆环境图像进行拼接,获得多张待处理图像,并确定各所述待处理图像之间的重叠区域;
4、获取所述重叠区域中各所述待处理图像之间的像素强度差信息和像素梯度差信息;
5、根据所述像素强度差信息和所述像素梯度差信息确定缝合路线;
6、根据所述缝合路线对各所述待处理图像进行图像融合,获得目标车辆环境图像;
7、根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,并对识别到的个体进行监测。
8、可选地,所述获取所述重叠区域中各所述待处理图像之间的像素强度差信息和像素梯度差信息,包括:
9、确定各所述待处理图像中的待融合图像,以及与所述待融合图像之间对应重叠的重叠图像;
10、获取所述待融合图像和所述重叠图像在所述重叠区域中的像素信息;
11、根据所述像素信息获取所述待融合图像在所述重叠区域中的第一像素强度信息和第一像素梯度信息,以及所述重叠图像在所述重叠区域中的第二像素强度信息和第二像素梯度信息;
12、根据所述第一像素强度信息和所述第二像素强度信息获取所述待融合图像与所述重叠图像之间的像素强度差信息;
13、根据所述第一像素梯度信息和所述第二像素梯度信息获取所述待融合图像与所述重叠图像之间的像素梯度差信息。
14、可选地,所述根据所述像素强度差信息和所述像素梯度差信息确定缝合路线,包括:
15、根据所述像素强度差信息和所述像素梯度差信息设置能量函数;
16、根据所述能量函数确定所述重叠区域的能量特征;
17、根据所述能量特征和所述能量函数生成能量图像;
18、对所述能量图像中的各行进行遍历,根据遍历结果确定缝合路线。
19、可选地,所述根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,并对识别到的个体进行监测,包括:
20、根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,确定当前环境中存在的个体;
21、根据所述目标车辆环境图像获取所述个体在多张连续的帧图像中对应的多组距离信息,以及各所述距离信息对应的帧顺序;
22、根据所述帧顺序设置各所述距离信息的距离权重;
23、根据所述距离权重对各所述距离信息进行加权,获得目标距离信息,并将所述目标距离信息作为所述个体的当前距离信息;
24、根据所述当前距离信息对所述个体进行距离监测。
25、可选地,所述根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,确定当前环境中存在的个体,包括:
26、将所述目标车辆环境图像进行栅格划分,获得多个栅格;
27、对各所述栅格进行预测,获得多个边界框;
28、获取各所述边界框的置信度信息;
29、根据所述置信度信息从各所述边界框中筛选出符合预设置信度条件的目标边界框;
30、根据所述目标边界框进行个体识别,确定当前环境中存在的个体。
31、可选地,所述根据所述目标车辆环境图像获取所述个体在多张连续的帧图像中对应的多组距离信息,包括:
32、根据所述目标车辆环境图像获取所述个体在多张连续的帧图像中对应的像素平面坐标;
33、将所述像素平面坐标进行转换,获得所述个体在多张连续的帧图像中对应的成像平面坐标;
34、根据所述成像平面坐标获取所述个体在多张连续的帧图像中对应的多组距离信息。
35、可选地,所述对采集到的初始车辆环境图像进行拼接,获得多张待处理图像,并确定各所述待处理图像之间的重叠区域,包括:
36、对采集到的初始车辆环境图像进行特征点检测,确定所述初始车辆环境图像中的特征点;
37、获取所述特征点的位置信息;
38、根据所述位置信息获取所述特征点的描述符信息;
39、根据所述描述符信息将所述初始车辆环境图像中的各所述特征点进行匹配;
40、根据特征点匹配结果对所述初始车辆环境图像进行拼接,获得多张待处理图像,并确定各所述待处理图像之间的重叠区域。
41、此外,为实现上述目的,本发明还提出一种车辆环境监测装置,所述车辆环境监测装置包括:
42、图像拼接模块,用于对采集到的初始车辆环境图像进行拼接,获得多张待处理图像,并确定各所述待处理图像之间的重叠区域;
43、信息获取模块,用于获取所述重叠区域中各所述待处理图像之间的像素强度差信息和像素梯度差信息;
44、路线确定模块,用于根据所述像素强度差信息和所述像素梯度差信息确定缝合路线;
45、图像融合模块,用于根据所述缝合路线对各所述待处理图像进行图像融合,获得目标车辆环境图像;
46、环境监测模块,用于根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,并对识别到的个体进行监测。
47、此外,为实现上述目的,本发明还提出一种车辆环境监测设备,所述车辆环境监测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆环境监测程序,所述车辆环境监测程序配置为实现如上文所述的车辆环境监测方法的步骤。
48、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有车辆环境监测程序,所述车辆环境监测程序被处理器执行时实现如上文所述的车辆环境监测方法的步骤。
49、本发明通过对采集到的初始车辆环境图像进行拼接,获得多张待处理图像,并确定各所述待处理图像之间的重叠区域,获取所述重叠区域中各所述待处理图像之间的像素强度差信息和像素梯度差信息,根据所述像素强度差信息和所述像素梯度差信息确定缝合路线,根据所述缝合路线对各所述待处理图像进行图像融合,获得目标车辆环境图像,根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,并对识别到的个体进行监测;由于本发明通过对采集到的初始车辆环境图像进行拼接,从而获得需要进行融合处理的多张待处理图像,以消除拼接后图像中的拼接痕迹,并确定各所述待处理图像之间的重叠区域,获取所述重叠区域中各所述待处理图像之间的像素强度差信息和像素梯度差信息,根据所述像素强度差信息和所述像素梯度差信息确定缝合路线,实现了对融合处理的路径进行规划,有效地提升了图像融合处理的效率,根据所述缝合路线对各所述待处理图像进行图像融合,获得目标车辆环境图像,根据所述目标车辆环境图像对车辆所处的当前环境进行个体识别,并对识别到的个体进行监测,由于本发明通过确定待处理图像之间的像素差异信息,从而实现了对融合路径的规划,提升了图像融合处理的效率,有效地提升了采集到的车辆环境图像的视觉效果,从而可以准确地感知车辆周围环境,有效提升了车辆安全性能。
- 还没有人留言评论。精彩留言会获得点赞!