路口的分类方法、装置及电子设备与流程
本公开涉及高精地图,具体涉及一种路口的分类方法、装置及电子设备。
背景技术:
1、随着技术的发展,拥有更精确位置信息和更丰富道路元素的高精地图逐渐成为各类基于位置的服务系统的基础数据。
2、高精地图的生产过程中,路口的数据处理占有很大的比重,通常针对不同类型的路口,需要采用不同的处理流程,为了使路口进入正确的处理流程,因此,需要提供能够高效、准确确定路口类别的路口的分类方案。
技术实现思路
1、本公开实施例提供一种路口的分类方法、装置及电子设备。
2、第一方面,本公开实施例中提供了一种路口的分类方法。
3、具体的,所述路口的分类方法,包括:
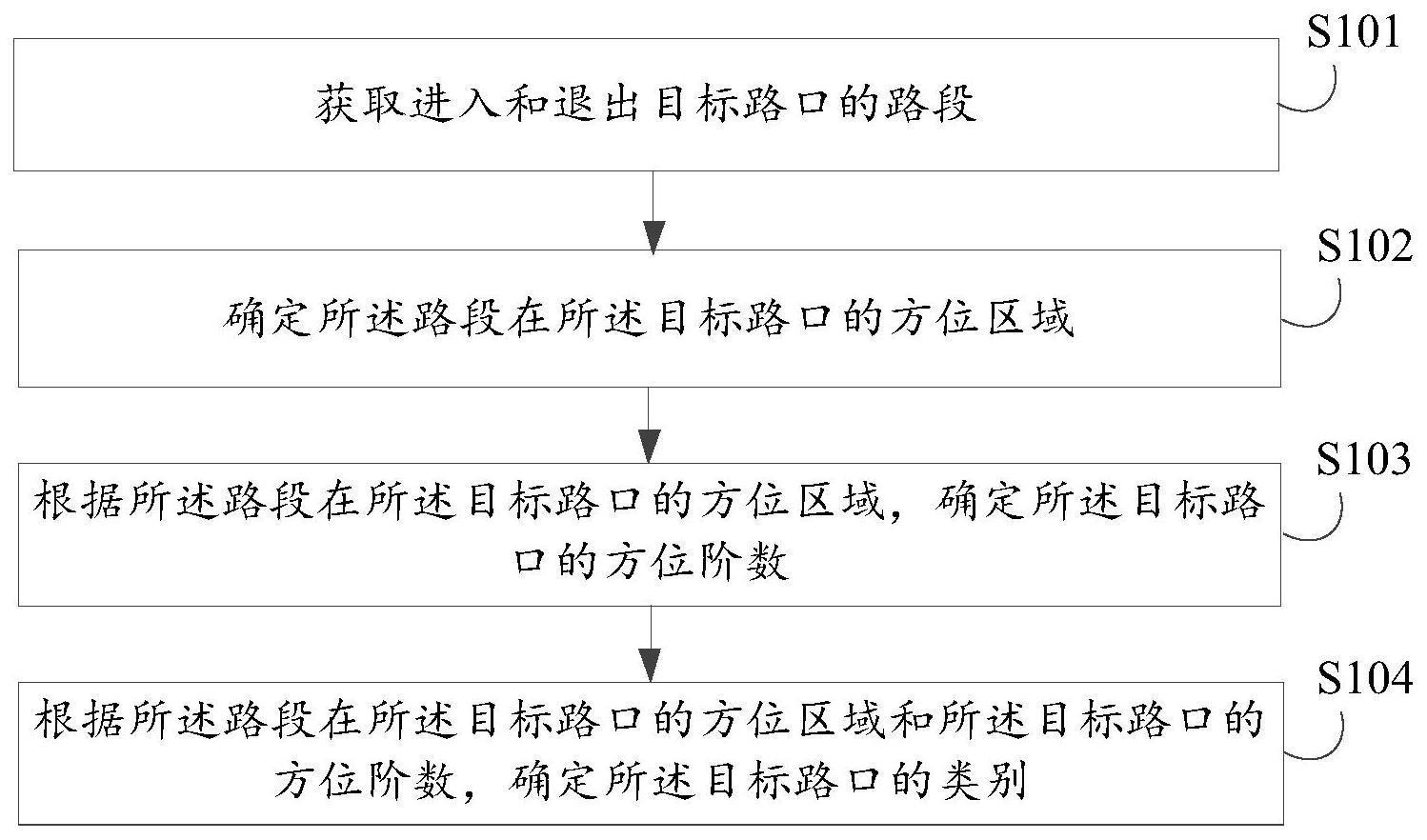
4、获取进入和退出目标路口的路段;
5、确定所述路段在所述目标路口的方位区域;
6、根据所述路段在所述目标路口的方位区域,确定所述目标路口的方位阶数;
7、根据所述路段在所述目标路口的方位区域和所述目标路口的方位阶数,确定所述目标路口的类别。
8、在本公开一实施方式中,所述确定所述路段在所述目标路口的方位区域,包括:
9、以所述目标路口的中心点为坐标原点,建立直角坐标系;
10、在所述直角坐标系中将所述目标路口划分为八个方位区域;
11、根据所述路段与八个方位区域之间的位置关系,确定所述路段在所述目标路口的方位区域。
12、在本公开一实施方式中,所述以所述目标路口的中心点为坐标原点,建立直角坐标系,包括:
13、以所述目标路口的中心点为坐标原点,建立正y轴指向北、负y轴指向南、正x轴指向东、负x轴指向西的直角坐标系。
14、在本公开一实施方式中,所述在所述直角坐标系中将所述目标路口划分为八个方位区域,包括:
15、以正x轴、负x轴、正y轴、负y轴分别作为东向、西向、北向和南向方位区域中心线,按照预设的方位区域角度范围,确定所述目标路口的东向方位区域、西向方位区域、北向方位区域和南向方位区域;
16、将位于所述目标路口的东向方位区域和北向方位区域之间的区域设置为东北向方位区域;
17、将位于所述目标路口的北向方位区域和西向方位区域之间的区域设置为西北向方位区域;
18、将位于所述目标路口的西向方位区域和南向方位区域之间的区域设置为西南向方位区域;
19、将位于所述目标路口的南向方位区域和东向方位区域之间的区域设置为东南向方位区域。
20、在本公开一实施方式中,所述根据所述路段与八个方位区域之间的位置关系,确定所述路段在所述目标路口的方位区域,包括:
21、提取所述路段的中心线,其中,所述中心线的方向与所述路段的方向一致;
22、计算所述路段的中心线与八个方位区域的方位区域中心线之间的夹角;
23、根据所述夹角和所述八个方位区域对应的角度范围,确定所述路段对应的初始方位区域;
24、对所述路段的初始方位区域进行校正,确定所述路段在所述目标路口的方位区域。
25、在本公开一实施方式中,所述根据所述夹角和所述八个方位区域对应的角度范围,确定所述路段对应的初始方位区域,包括:
26、当所述夹角落入目标方位区域对应的角度范围时,确定所述路段对应的初始方位区域为目标方位区域。
27、在本公开一实施方式中,所述对所述路段的初始方位区域进行校正,确定所述路段在所述目标路口的方位区域,包括:
28、沿顺时针方向,从所述八个方位区域中,确定用于校正所述初始方位区域的校正方位区域,其中,所述校正方位区域的中心线与初始方位区域的中心线相互垂直,且所述校正方位区域与所述初始方位区域的距离最近;
29、确定所述路段是沿顺时针方向还是逆时针方向能够最快到达所述校正方位区域;
30、若所述路段沿顺时针方向能够最快到达所述校正方位区域,将所述初始方位区域确定为所述路段在所述目标路口的方位区域,若所述路段沿逆时针方向能够最快到达所述校正方位区域,则将所述初始方位区域校正为位于所述初始方位区域对侧的方位区域。
31、在本公开一实施方式中,所述根据所述路段在所述目标路口的方位区域,确定所述目标路口的方位阶数,包括:
32、统计所述路段在所述目标路口的不同方位区域的数量;
33、将所述路段在所述目标路口的不同方位区域的数量,确定为所述目标路口的方位阶数。
34、在本公开一实施方式中,所述根据所述路段在所述目标路口的方位区域和所述目标路口的方位阶数,确定所述目标路口的类别,包括:
35、以所述直角坐标系的正y轴方向对应的方位区域为起始方位区域,沿顺时针方向对于方位区域进行编号,其中,相邻方位区域编号差为1;
36、当所述目标路口的方位阶数为3,且所述路段中包括一对方位区域编号差为4的路段时,确定所述目标路口为t形路口;
37、当所述目标路口的方位阶数为2,且不同方位区域编号差为2时,确定所述目标路口为l形路口;
38、当所述目标路口的方位阶数为3,且所述路段中不存在方位区域编号差为4的路段时,确定所述目标路口为y形路口;
39、当所述目标路口的方位阶数为4,且所述路段中包括两对方位区域编号差为4的路段和一对方位区域编号差为2的路段时,确定所述目标路口为十形路口;
40、当所述目标路口的方位阶数为4,且所述路段中包括两对方位区域编号差为4的路段,但不存在一对方位区域编号差为2的路段时,确定所述目标路口为x形路口。
41、第二方面,本公开实施例中提供了一种路口的分类装置。
42、具体的,所述路口的分类装置,包括:
43、获取模块,被配置为获取进入和退出目标路口的路段;
44、第一确定模块,被配置为确定所述路段在所述目标路口的方位区域;
45、第二确定模块,被配置为根据所述路段在所述目标路口的方位区域,确定所述目标路口的方位阶数;
46、分类模块,被配置为根据所述路段在所述目标路口的方位区域和所述目标路口的方位阶数,确定所述目标路口的类别。
47、第三方面,本公开实施例提供了一种电子设备,包括存储器和至少一个处理器,其中,所述存储器用于存储一条或多条计算机指令,其中,所述一条或多条计算机指令被所述至少一个处理器执行以实现上述路口的分类方法的方法步骤。
48、第四方面,本公开实施例提供了一种计算机可读存储介质,用于存储路口的分类装置所用的计算机指令,其包含用于执行上述路口的分类方法为路口的分类装置所涉及的计算机指令。
49、第五方面,本公开实施例提供了一种计算机程序产品,包括计算机程序/指令,其中,该计算机程序/指令被处理器执行时实现上述路口的分类方法的方法步骤。
50、本公开实施例提供的技术方案可以包括以下有益效果:
51、上述技术方案借助与路口连通的路段所属的方位区域来确定路口的类别。该技术方案实现简单,能够快速并且准确地确定某一路口所属的类别,进而提升高精地图数据的质量,提高高精地图数据处理的效率和准确性,改善用户的使用体验。
52、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!