无人库房的档案盘点方法、装置、介质、设备及无人库房与流程
本公开涉及无人库房管理,尤其涉及无人库房的档案盘点方法、装置、介质、设备及无人库房。
背景技术:
1、相关技术中,针对无人库房的档案盘点,可利用自动盘点代替人工盘点,以提高盘点效率。
2、但是,通常采用全场景扫描的方式实现档案盘点,盘点效率较低。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了无人库房的档案盘点方法、装置、介质、设备及无人库房。
2、本公开提供了一种无人库房的档案盘点方法,包括:
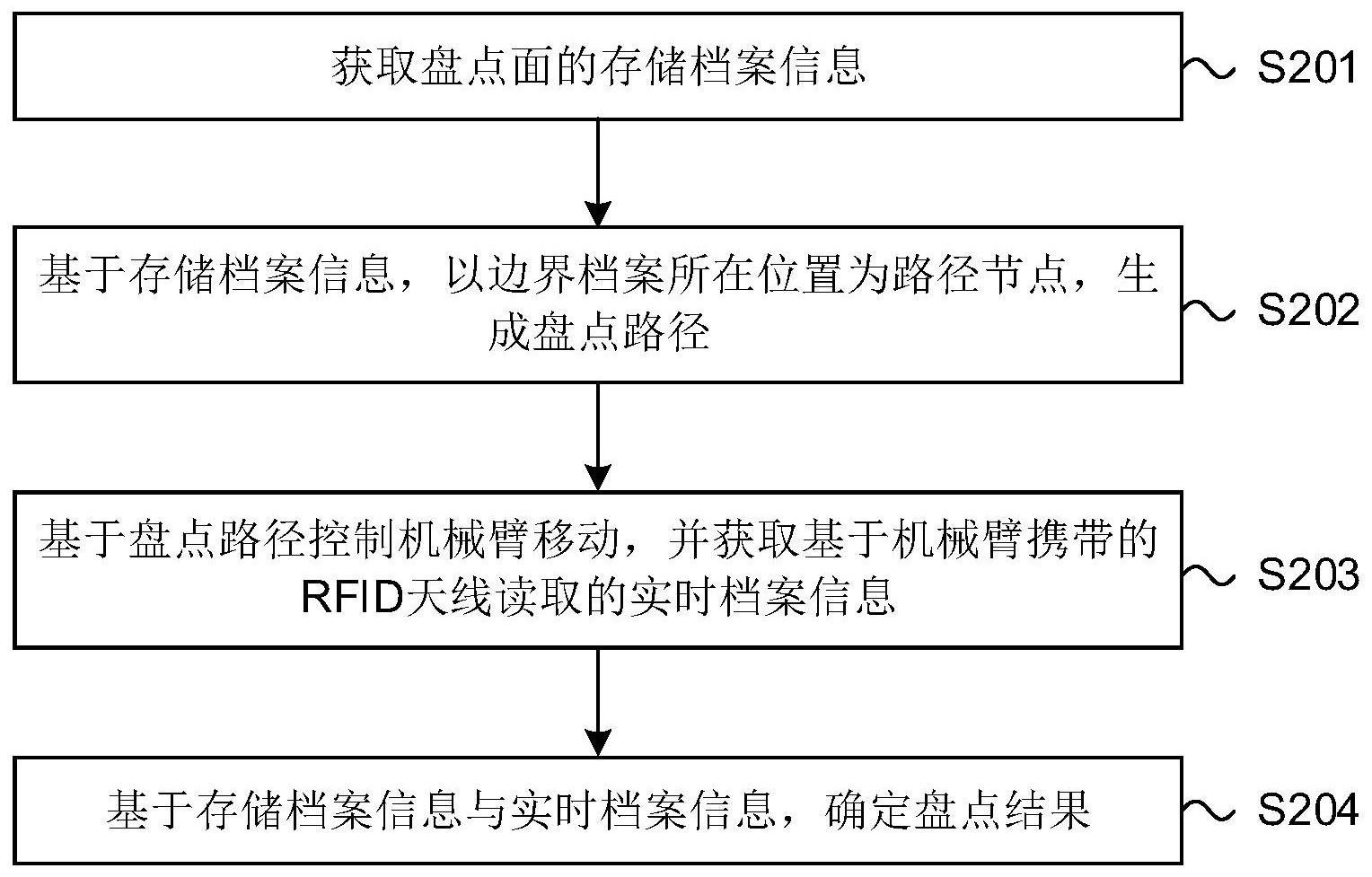
3、获取盘点面的存储档案信息;
4、基于所述存储档案信息,以边界档案所在位置为路径节点,生成盘点路径;
5、基于所述盘点路径控制机械臂移动,并获取基于所述机械臂携带的rfid天线读取的实时档案信息;
6、基于所述存储档案信息与所述实时档案信息,确定盘点结果。
7、可选地,所述获取盘点面的存储档案信息,包括:
8、获取盘点面所有档案的存储数据;
9、基于所述存储数据,关联rfid标签的编码信息和架位信息;
10、所述架位信息与所述编码信息关联。
11、可选地,所述架位信息采用“柜-节-层-位”的数组形式表示,所述生成盘点路径,包括:
12、生成盘点路径对应的任务序列;
13、所述任务序列包括按层分解的多个任务。
14、可选地,所述基于所述盘点路径控制机械臂移动,包括:
15、响应于目标指令,将目标任务发送至受控终端;所述受控终端控制机械臂执行所述目标任务;
16、在获取到所述目标任务已经执行完成的信息之后,将下一目标任务发送至所述受控终端;
17、直至所述任务序列中的多个任务均完成为止。
18、可选地,所述实时档案信息由中间件暂存;获取所述实时档案信息,包括:
19、按照预设时间间隔获取所述中间件暂存的实时档案信息;
20、所述中间件暂存的实时档案信息为基于所述rfid天线读取的实时档案信息进行数据去重处理之后的实时档案信息。
21、可选地,所述确定盘点结果之后,所述方法还包括:
22、将所述盘点结果发送至目标客户端,以供所述目标客户端展示;
23、和/或,
24、基于所述盘点结果,判断是否存在漏扫档案;
25、若存在漏扫档案,则基于漏扫档案的位置重新规划盘点路径,得到复扫路径;所述复扫路径包括漏扫档案的位置而不包括已盘点到的档案的位置;
26、基于复扫路径进行再次盘点;再次盘点时机械臂在每个目标漏扫档案的位置处的停留时间均等于或大于预设时间;
27、若不存在漏扫档案,则确定盘点完成。
28、本公开还提供了一种无人库房的档案盘点装置,包括:
29、第一获取单元,用于获取盘点面的存储档案信息;
30、路径生成单元,用于基于所述存储档案信息,以边界档案所在位置为路径节点,生成盘点路径;
31、第二获取单元,用于基于所述盘点路径控制机械臂移动,并获取基于所述机械臂携带的rfid天线读取的实时档案信息;
32、结果确定单元,用于基于所述存储档案信息与所述实时档案信息,确定盘点结果。
33、本公开还提供了一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行上述任一种方法的步骤。
34、本公开还提供了一种电子设备,包括:处理器和存储器;
35、所述处理器通过调用所述存储器存储的程序或指令,用于执行上述任一种方法的步骤。
36、本公开还提供了一种无人库房,包括:档案柜和机械臂;所述机械臂通过携带的rfid天线读取实时档案信息;
37、所述无人库房应用档案管理系统进行管理,所述档案管理系统用于执行上述任一种方法的步骤。
38、本公开提供的技术方案与现有技术相比具有如下优点:
39、本公开提供的无人库房的档案管理方法,通过获取盘点面的存储档案信息;基于存储档案信息,以边界档案所在位置为路径节点,生成盘点路径;基于盘点路径控制机械臂移动,并获取基于机械臂携带的rfid天线读取的实时档案信息;基于存储档案信息与实时档案信息,确定盘点结果,能够结合待盘点的存储档案信息,灵活地生成匹配的盘点路径,并结合生成的盘点路径,利用机械臂携带的rfid天线进行针对性的扫描,以实现档案盘点,该档案盘点方法避免了全场景扫描,而是进行针对性地扫描盘点,有利于提高扫描效率,进而提高档案盘点效率。
技术特征:
1.一种无人库房的档案盘点方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取盘点面的存储档案信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述架位信息采用“柜-节-层-位”的数组形式表示,所述生成盘点路径,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述盘点路径控制机械臂移动,包括:
5.根据权利要求1-4任一项所述的方法,其特征在于,所述实时档案信息由中间件暂存;获取所述实时档案信息,包括:
6.根据权利要求1-4任一项所述的方法,其特征在于,所述确定盘点结果之后,还包括:
7.一种无人库房的档案盘点装置,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1-6任一项所述方法的步骤。
9.一种电子设备,其特征在于,包括:处理器和存储器;
10.一种无人库房,其特征在于,包括:档案柜和机械臂;所述机械臂通过携带的rfid天线读取实时档案信息;
技术总结
本公开涉及无人库房的档案盘点方法、装置、介质、设备及无人库房,该方法包括:获取盘点面的存储档案信息;基于存储档案信息,以边界档案所在位置为路径节点,生成盘点路径;基于盘点路径控制机械臂移动,并获取基于机械臂携带的RFID天线读取的实时档案信息;基于存储档案信息与实时档案信息,确定盘点结果。如此能够结合待盘点的存储档案信息,灵活地生成匹配的盘点路径,并结合生成的盘点路径,利用机械臂携带的RFID天线进行针对性的扫描,以实现档案盘点,该档案盘点方法避免了全场景扫描,而是进行针对性地扫描盘点,有利于提高扫描效率,进而提高档案盘点效率。
技术研发人员:彭程,朱峰林宏,张良,何海楠
受保护的技术使用者:申江万国数据信息股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!