一种基于平行驾驶舱的远程处理方法、系统及存储介质与流程
本发明涉及远程驾驶,尤其是涉及一种基于平行驾驶舱的远程处理方法、系统及存储介质。
背景技术:
1、每年因驾驶员疲劳导致的事故数量很大,虽然有些车上配置了驾驶员监测系统,但是只能起到提醒预警等辅助作用,无法主动干预车辆,避免事故发生,远程驾驶舱可以远程显示驾驶员的视频信息,但是无法自动识别驾驶员的异常信息并做出及时处理。
2、当驾驶员疲劳驾驶或者出现驾驶员身体状况出问题的时候,不能通过驾驶员监测系统监测到异常,从而不能及时做出提醒或者必要时无法通过远程进行人工干预,导致车辆事故发生。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于平行驾驶舱的远程处理方法、系统及存储介质,不仅通过dms摄像头进行驾驶员实时监控,提高了行驶的安全性,而且采用平行驾驶舱对车辆进行控制,降低了车辆事故发生率。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于平行驾驶舱的远程处理方法,所述方法包括:
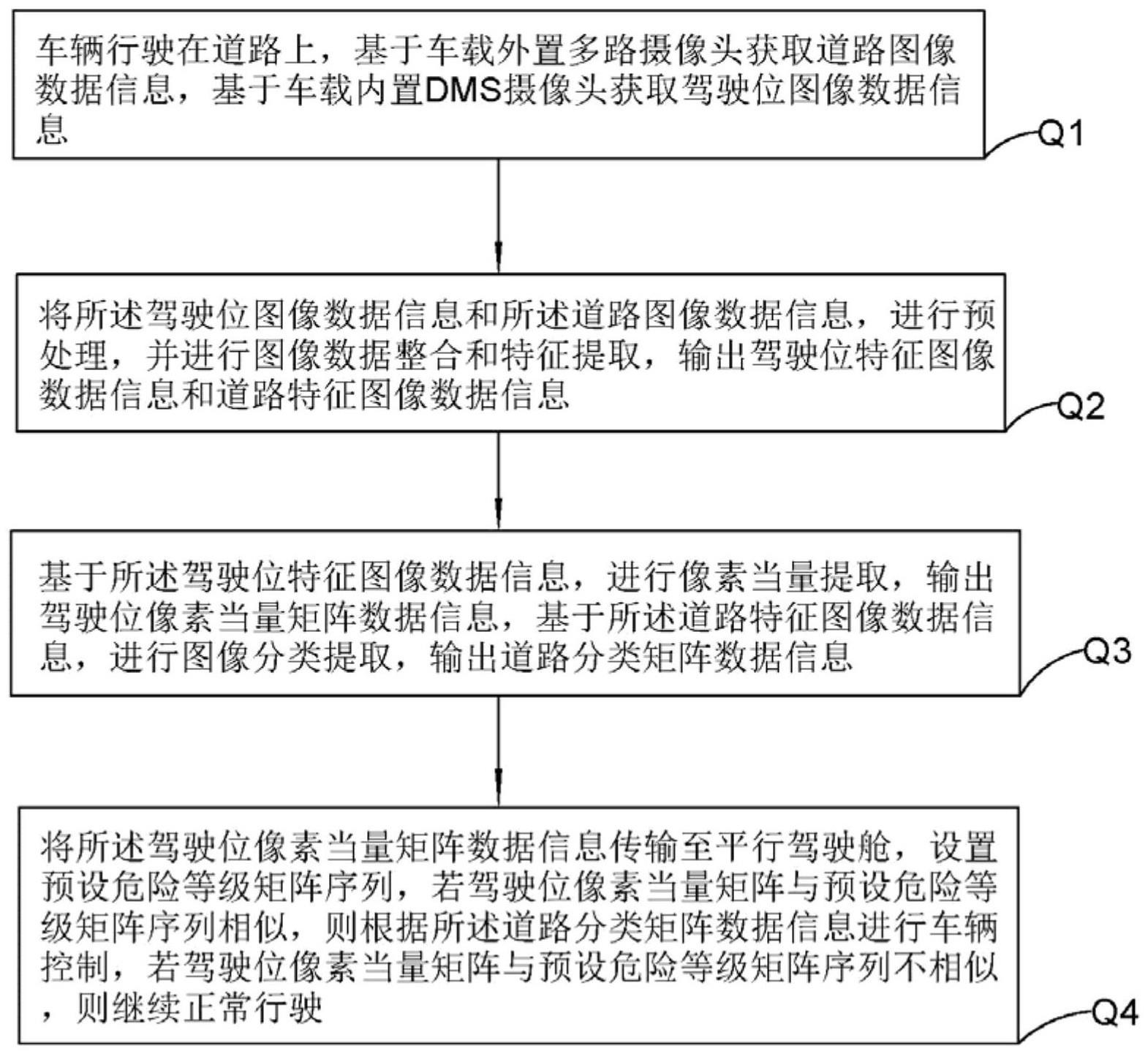
4、q1.车辆行驶在道路上,基于车载外置多路摄像头获取道路图像数据信息,基于车载内置dms摄像头获取驾驶位图像数据信息;
5、q2.将所述驾驶位图像数据信息和所述道路图像数据信息进行预处理,并进行图像数据整合和特征提取,输出驾驶位特征图像数据信息和道路特征图像数据信息;
6、q3.基于所述驾驶位特征图像数据信息,进行像素当量提取,输出驾驶位像素当量矩阵数据信息,基于所述道路特征图像数据信息,进行图像分类提取,输出道路分类矩阵数据信息;
7、q4.将所述驾驶位像素当量矩阵数据信息传输至平行驾驶舱,设置预设危险等级矩阵,若驾驶位像素当量矩阵与预设危险等级矩阵相似,则根据所述道路分类矩阵数据信息进行车辆控制,若驾驶位像素当量矩阵与预设危险等级矩阵不相似,则继续正常行驶。
8、进一步的,在步骤q4中,所述危险等级矩阵包括:
9、危险等级一的矩阵组,根据驾驶员疲劳时的图像特征数据信息,进行特征提取,得到驾驶员图像的特征矩阵组;
10、危险等级二的矩阵组,根据驾驶员睡着的图像特征数据信息,进行特征提取,得到驾驶员图像的特征矩阵组;
11、危险等级三的矩阵组,根据驾驶员不在驾驶位置的图像特征数据信息,进行特征提取,得到驾驶员图像的特征矩阵组。
12、进一步的,判断所述驾驶位像素当量矩阵与所述危险等级矩阵序列是否相似的函数为,
13、m=p-1nip,
14、其中m为驾驶位像素当量矩阵,ni为危险等级矩阵序列,p为可逆矩阵。
15、进一步的,若满足函数m,则驾驶位像素当量矩阵与危险等级矩阵序列相似,输出与之对应的危险等级,若不满足函数m,则不相似,驾驶员正常。
16、进一步的,所述道路分类矩阵数据信息包括路面矩阵数据信息、行人矩阵数据信息、其他车辆矩阵数据信息和障碍物矩阵数据信息。
17、为了实现上述目的及其他相关目的,本发明还提供了一种基于平行驾驶舱的远程处理系统,所述系统包括:
18、摄像头模块,用于获取道路图像数据信息和驾驶位图像数据信息;
19、车端控制器,与所述摄像头模块连接,用于接收摄像头模块传输的图像数据信息和将图像数据信息进行压缩编码;
20、车辆执行器,与所述车端控制器连接,用于传输车辆的状态和接收车辆控制指令;
21、云服务器,与所述车端控制器连接,用于接收所述车端控制器的数据信息和下发车辆控制指令;
22、舱端主机,与所述云服务器连接,用于接收、处理车端控制器的数据信息和发送车辆控制指令。
23、进一步的,所述舱端主机连接有驾驶舱屏幕和舱端控制模块,驾驶员根据所述驾驶舱屏幕显示的所述车端控制器数据信息,通过所述舱端控制模块进行操作,输出车辆控制指令。
24、进一步的,所述车端控制器与所述云服务器通过5g网络进行通信连接,所述云服务器与所述舱端主机通过5g网络进行通信连接。
25、进一步的,所述车辆控制指令包括车辆踏板指令、车辆转向灯指令和方向盘转角指令。
26、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述基于平行驾驶舱的远程处理方法的计算机程序。
27、本发明具有以下积极效果:
28、1.本发明通过车端控制器、云服务器和舱端主机进行5g通讯连接,不仅能够及时获取车辆状态数据信息,而且能够及时控制车辆脱离危险。
29、2.本发明采用危险等级矩阵序列对危险等级进行划分,不仅提高了识别精度,而且根据危险等级进行精确划分采取不同的应对措施。
30、3.本发明通过对图像数据信息进行像素当量的提取,根据像素当量的特征矩阵与危险等级矩阵序列是否相似,来判断危险等级,精度高,误差率小。
技术特征:
1.一种基于平行驾驶舱的远程处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于平行驾驶舱的远程处理方法,其特征在于,在步骤q4中,所述危险等级矩阵序列包括:
3.根据权利要求1所述的基于平行驾驶舱的远程处理方法,其特征在于:判断所述驾驶位像素当量矩阵与所述危险等级矩阵序列是否相似的函数为,m=p-1nip,
4.根据权利要求3所述的基于平行驾驶舱的远程处理方法,其特征在于:若满足函数m,则驾驶位像素当量矩阵与危险等级矩阵序列相似,输出与之对应的危险等级,若不满足函数m,则不相似,驾驶员正常。
5.根据权利要求1所述的基于平行驾驶舱的远程处理方法,其特征在于:所述道路分类矩阵数据信息包括路面矩阵数据信息、行人矩阵数据信息、其他车辆矩阵数据信息和障碍物矩阵数据信息。
6.一种基于平行驾驶舱的远程处理系统,其特征在于,所述系统包括:
7.根据权利要求6所述的基于平行驾驶舱的远程处理系统,其特征在于:所述舱端主机连接有驾驶舱屏幕和舱端控制模块,驾驶员根据所述驾驶舱屏幕显示的所述车端控制器数据信息,通过所述舱端控制模块进行操作,输出车辆控制指令。
8.根据权利要求6所述的基于平行驾驶舱的远程处理系统,其特征在于:所述车端控制器与所述云服务器通过5g网络进行通信连接,所述云服务器与所述舱端主机通过5g网络进行通信连接。
9.根据权利要求6所述的基于平行驾驶舱的远程处理系统,其特征在于:所述车辆控制指令包括车辆踏板指令、车辆转向灯指令和方向盘转角指令。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有被编程或配置以执行权利要求1~7中任意一项所述基于平行驾驶舱的远程处理方法的计算机程序。
技术总结
本发明涉及一种基于平行驾驶舱的远程处理方法、系统及存储介质,所述方法包括Q1.车辆行驶在道路上,基于车载外置多路摄像头获取道路图像数据信息,基于车载内置DMS摄像头获取驾驶位图像数据信息;Q2.将所述驾驶位图像数据信息和所述道路图像数据信息进行预处理,并进行图像数据整合和特征提取,输出驾驶位特征图像数据信息和道路特征图像数据信息;Q3.基于所述驾驶位特征图像数据信息,进行像素当量提取,输出驾驶位像素当量矩阵数据信息,基于所述道路特征图像数据信息,进行图像分类提取。本发明不仅通过DMS摄像头进行驾驶员实时监控,提高了行驶的安全性,而且采用平行驾驶舱对车辆进行控制,降低了车辆事故发生率。
技术研发人员:杨金菊,吴明瞭,孙营,熊保平,申建中,周晶,刘国强,高广博,李波
受保护的技术使用者:广州海珀特科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!