基于视觉检测的铁路道岔开口判定方法及系统与流程
本发明属于铁路视觉检测,具体涉及一种基于视觉检测的铁路道岔开口判定方法及系统。
背景技术:
1、铁道车辆的行驶中需要准确识别前方铁轨路况,以保证行驶安全。由于铁路轨道一般覆盖范围广,铁轨之间交错连通,对铁路道岔开口方向的准确判断是铁路安全行驶的基本要求。
2、基于机器视觉的车道识别已经成为辅助驾驶的重要发展方向,而机器视觉技术在识别铁路轨道线方面的应用还较少,目前主要集中在铁路轨道线识别,用于线路检测和预警,而基于机器视觉技术进行铁路道岔开口方向判断的研究甚少。公开号为cn112004732a的发明专利公开了一种铁路轨道识别装置,并公开了用于检测是否存在从检测出的所述铁路轨道分支的分支轨道检测部,但是其仅能根据图像检测出是否有分支轨道以及分支轨道的位置,但是并不能准确判断出道岔开口方向,因此为了进一步为铁路车辆运行提供更有用的信息,有必要提出一种基于机器视觉的铁路道岔开口方向判定方法。
技术实现思路
1、有鉴于此,本发明提出了一种基于视觉检测的铁路道岔开口判定方法及系统,用于解决现有的视觉检测技术无法有效识别铁路道岔开口方向的问题。
2、本发明第一方面,公开一种基于视觉检测的铁路道岔开口判定方法,所述方法包括:
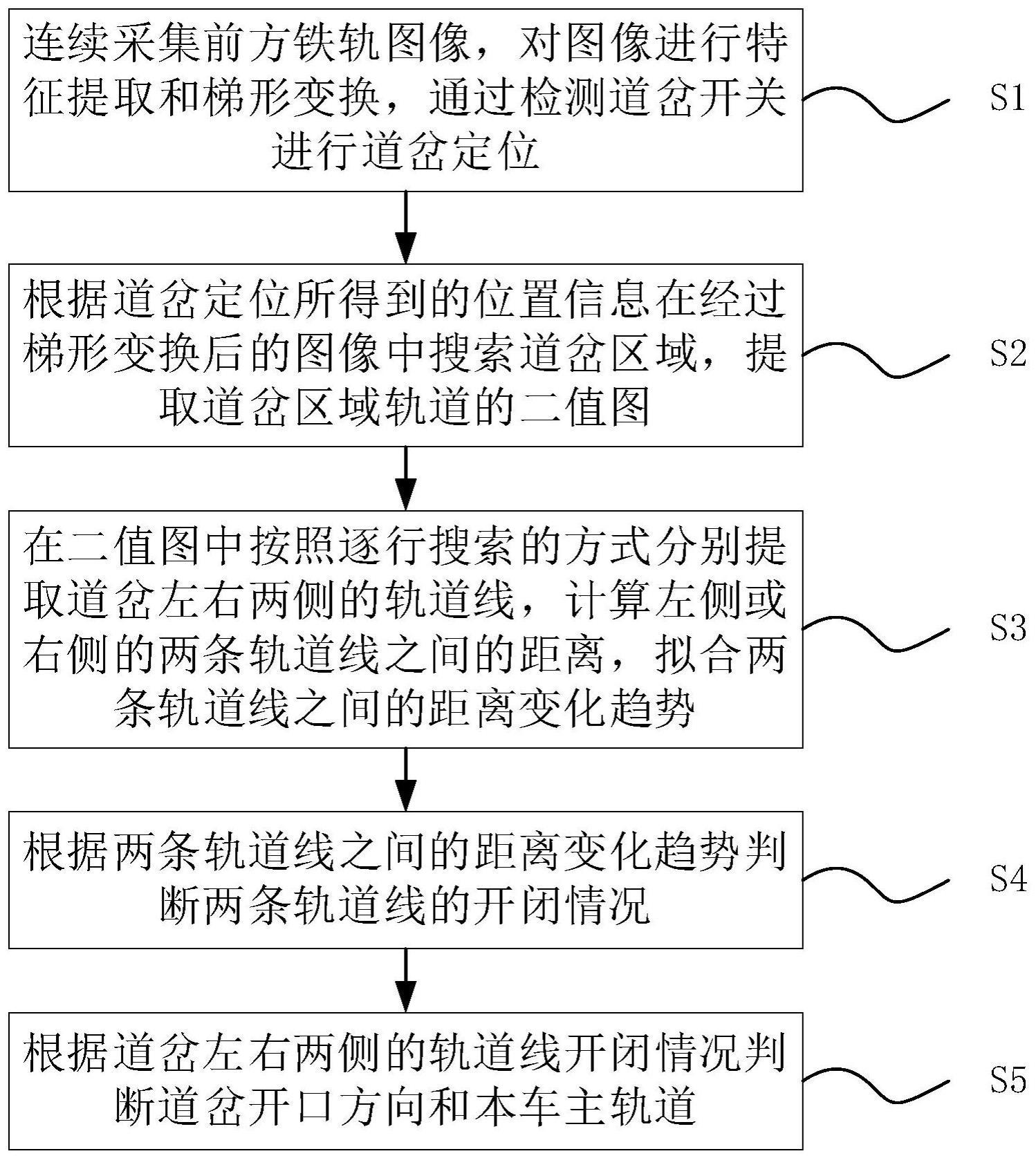
3、连续采集前方铁轨图像,对图像进行特征提取和梯形变换,通过检测道岔开关进行道岔定位;
4、根据道岔定位所得到的位置信息在经过梯形变换后的图像中搜索道岔区域,提取道岔区域轨道的二值图;
5、在二值图中按照逐行搜索的方式分别提取道岔左右两侧的轨道线,计算左侧/右侧的两条轨道线之间的距离,拟合道岔左侧/右侧的两条轨道线之间的距离变化趋势;
6、根据道岔左侧/右侧的两条轨道线之间的距离变化趋势判断左侧/右侧的两条轨道线的开闭情况;
7、根据道岔左右两侧的轨道线开闭情况判断道岔开口方向和本车主轨道。
8、在以上技术方案的基础上,优选的,所述对图像进行特征提取和梯形变换具体包括:
9、提取图像的边缘特征,得到图像的横向高频分量;
10、对具有横向高频分量的图像进行梯形变换,变换公式为:
11、
12、factor(i)w=lenw/(stp(i,j)-sta(i,j))
13、其中,img_outi,j为梯形变换的输出结果,i=1,2,…,h,j=1,2,…,w,h和w分别为图像的高度和宽度,imresize(·)为缩放函数,用于对图像进行双线性插值后缩放,iimg[i,sta(i,j):stp(i,j)]表示图像的第i行中从sta(i,j)开始到stp(i,j)结束的像素点,sta(i,j)和stp(i,j)的计算公式为:
14、sta(i,j)=floor(k0*(i-search_row_num)+1+j)
15、stp(i,j)=floor(k1*(i-search_row_num)+right_ipm-left_ipm+1+j)
16、floor(·)为取整函数,k0、k1分别表示梯形两条腰所在直线的斜率,search_row_num为梯形像素高度,right_ipm、left_ipm分别表示梯形右下角、左下角的像素点的横坐标,factor(i)w表示图像宽度缩放系数,lenw表示缩放后的图像宽度。
17、在以上技术方案的基础上,优选的,所述通过检测道岔开关进行道岔定位具体包括:
18、分别将两个道岔开关图像在经过梯形变换后的图像中进行滑动搜索匹配,分别得到图像与第一道岔开关kernel1的相关值cor1i,j、与第二道岔开关kernel2的相关值cor2i,j:
19、
20、
21、其中,i、j表示图像像素的第i行、第j列,i=1,2,…,h,j=1,2,…,w,h和w分别为图像的高度和宽度,imresize(·)表示缩放函数,用于对道岔开关图像进行双线性插值后缩放变换,size_init(i,j)为图像img的宽度和高度的缩放系数,与像素点(i,j)的位置与实际地面位置之间的距离大小成反比;img[i,j]为梯形变换后的图像img中与缩放变换后的道岔开关图像对应的窗口区域,∑i,j表示对以(i,j)为左上角的窗口区域内的运算结果求和;
22、factorh、factorw为系数校正因子:
23、
24、
25、其中,θinit和θactual分别为相机标定得到初始旋转角和实际旋转角,分别为相机标定得到初始俯仰角和实际俯仰角;
26、寻找相关值的最大值所在区域作为道岔定位结果index(i,j):
27、index(i,j)=max(cor1i,j,cor2i,j)
28、其中,max(·)为求最大值函数。
29、在以上技术方案的基础上,优选的,若index(i,j)从cor1i,j中得到,在index(i,j)右侧沿着轨道方向确定道岔的搜索区域;
30、若index(i,j)从cor2i,j中得到,在index(i,j)左侧沿着轨道方向确定道岔的搜索区域;
31、道岔的搜索区域包括道岔左侧的搜索区域和道岔右侧的搜索区域,分别对应道岔两侧的轨道线。
32、在以上技术方案的基础上,优选的,所述在二值图中按照逐行搜索的方式分别提取道岔左右两侧的轨道线,计算左侧/右侧的两条轨道线之间的距离具体包括:
33、在道岔左侧的搜索区域中,按照逐行的方式,从下往上搜索,提取道岔左侧的搜索区域中的两条轨道线;
34、在道岔右侧的搜索区域中,按照逐行的方式,从下往上搜索,提取道岔右侧的搜索区域中的两条轨道线;
35、计算道岔左侧的两条轨道线之间的距离和道岔右侧的两条轨道线之间的距离,两条轨道线之间的距离计算公式为:
36、
37、其中,dist为距离组成的向量,k=1,2,……,n,n为单条轨道线所占像素的行数,laneleft(k)、laneright(k)分别为最左侧和最右侧的两条轨道线中第k个像素点的像素位置。
38、在以上技术方案的基础上,优选的,所述根据左侧/右侧的轨道线之间的距离变化趋势判断左侧/右侧的轨道线的开闭情况具体包括:
39、若左侧/右侧的两条轨道线之间的距离变化趋势为从零一直变大的趋势时,判定左侧/右侧的两条轨道线为闭,左侧/右侧的两条轨道线之间的距离变化趋势满足先减小再增大时,判定左侧/右侧的两条轨道线为开。
40、在以上技术方案的基础上,优选的,所述根据道岔左右两侧的轨道线开闭情况判断道岔开口方向和本车主轨道具体包括:
41、若左侧的两条轨道线为闭,右侧的两条轨道线为开,则道岔开口方向为向右;
42、若右侧的两条轨道线为闭,左侧的两条轨道线为开,则道岔开口方向为向左;
43、根据开口侧的两条轨道线判断主轨道,其中开口侧延伸至到图像底端的那段轨道对应为本车主轨道,据轨道间距是固定的原理,确定对应侧的本车主轨道。
44、本发明第二方面,公开一种基于视觉检测的铁路道岔开口判定系统,所述系统包括:
45、道岔定位模块:用于连续采集前方铁轨图像,对图像进行特征提取和梯形变换,通过检测道岔开关进行道岔定位;
46、道岔搜索模块:用于根据道岔定位所得到的位置信息在经过梯形变换后的图像中搜索道岔区域,提取道岔区域轨道的二值图;在二值图中按照逐行搜索的方式分别提取道岔左右两侧的轨道线;
47、道岔判决模块:用于计算左侧/右侧的两条轨道线之间的距离,拟合道岔左侧/右侧的两条轨道线之间的距离变化趋势;根据左侧/右侧的两条轨道线之间的距离变化趋势判断左侧/右侧的两条轨道线的开闭情况;根据道岔左右两侧的轨道线开闭情况判断道岔开口方向和本车主轨道。
48、本发明第三方面,公开一种电子设备,包括:至少一个处理器、至少一个存储器、通信接口和总线;
49、其中,所述处理器、存储器、通信接口通过所述总线完成相互间的通信;
50、所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令,以实现如本发明第一方面所述的方法。
51、本发明第四方面,公开一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使计算机实现如本发明第一方面所述的方法。
52、本发明相对于现有技术具有以下有益效果:
53、1)本发明基于视觉检测技术搜索道岔开关进行道岔定位,根据道岔定位搜索道岔区域,并分别提取道岔左右两侧的轨道线,根据左侧/右侧的两条轨道线之间的距离变化趋势判断左侧/右侧的两条轨道线的开闭情况,从而判断道岔开口方向和本车主轨道,可以基于视觉检测技术实现道岔开口方向和本车轨道判断,不需要借助人工或复杂算法即可实现行驶方向快速判断,提高了车辆辅助驾驶控制的能力;
54、2)本发明将梯形变换后的图像分别与两个道岔开关进行搜索匹配,得到道岔开关的相关区域,寻找相关区域中的相关度较大的区域作为道岔所在位置,可以从图像中准确定位道岔区域,避免轨道线交错繁杂带来的道岔定位错误;
55、3)本发明根据道岔所在位置分别提取左侧和右侧的轨道线,可以根据两条轨道线之间的距离变化趋势是一直增大还是先减小再增大分辨出道岔左侧和右侧的轨道线开闭情况,提高了道岔方向判断的准确性和便捷性,从而快速、准确地识别本车主轨道。
- 还没有人留言评论。精彩留言会获得点赞!