基于非全局重复建模的三维重构模型局部优化方法和装置
本技术涉及数据采集,特别涉及一种基于非全局重复建模的三维重构模型局部优化方法和装置。
背景技术:
1、无人机倾斜摄影测量在城市建设、智能交通等领域得到了快速发展和应用,也为进一步的三维模型构建提供了有效的数据采集方案,从而最终获得高精度三维模型在城市综合整治规划、自动驾驶等领域发挥着重要的作用。
2、相关技术中,主要通过无人机按照规定路线在目标区域上方进行拍摄,以收集相关图像数据,但由于在图像数据采集过程中会因存在遮挡关系而导致获得的高精度三维模型破损,进而在模型破损后会采用人工手持设备进行补拍,然后将无人机采集的数据与地面的采集数据直接合并,同时利用建图软件进行三维建模。
3、然而,在数据补充采集方面采用人工补拍,并将人工补拍的数据和无人机采集的数据直接合并后进行建模,会存在重复建模的弊端,从而会产生大量的计算负担,不仅消耗人员精力,同时会降低数据补充采集的效率,亟需解决。
4、申请内容
5、本技术提供一种基于非全局重复建模的三维重构模型局部优化方法和装置,以解决通过人工补拍数据以及将无人机和地面采集的数据直接合并后建模所产生的计算负担,从而降低数据补充采集和建模效率等问题。
6、本技术第一方面实施例提供一种基于非全局重复建模的三维重构模型局部优化方法,包括以下步骤:
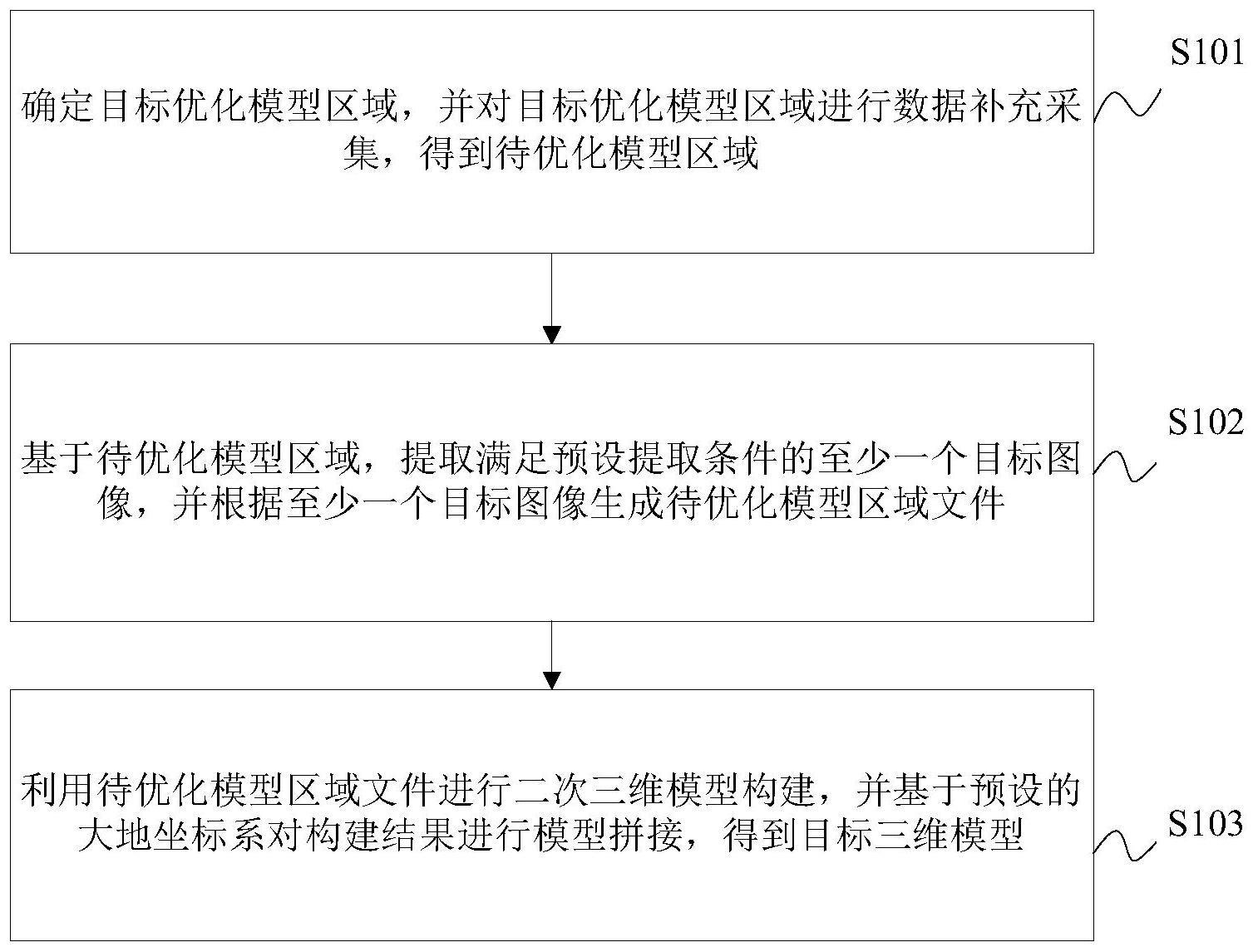
7、确定目标优化模型区域,并对所述目标优化模型区域进行数据补充采集,得到待优化模型区域;
8、基于所述待优化模型区域,提取满足预设提取条件的至少一个目标图像,并根据所述至少一个目标图像生成待优化模型区域文件;以及
9、利用所述待优化模型区域文件进行二次三维模型构建,并基于预设的大地坐标系对构建结果进行模型拼接,得到目标三维模型。
10、根据本技术的一个实施例,所述确定目标优化模型区域,包括:
11、基于gis(geographic information system,地理信息系统)地图数据,获取路网位置和道路宽度信息;
12、根据所述路网位置和所述道路宽度信息对待优化道路区域进行区域选择,并根据预先构建的模型框选出满足预设破损区域条件的区域,得到所述目标优化模型区域。
13、根据本技术的一个实施例,所述对所述目标优化模型区域进行数据补充采集,得到待优化模型区域,包括:
14、根据所述路网位置和所述道路宽度信息自动规划补拍路线;
15、根据当前相机参数生成最优候选区域,并按照预设生成策略在所述最优候选区域中生成多个候选视点,并通过预设的可视度矩阵优化筛选所述多个候选视点,且基于筛选结果生成车载摄像头视角网络;
16、基于所述补拍路线,根据所述车载摄像头视角网络实时调整摄像头视角,以对所述目标优化模型区域进行数据补充采集,得到所述待优化模型区域。
17、根据本技术的一个实施例,所述提取满足预设提取条件的至少一个目标图像,包括:
18、基于第一预设补拍范围,选择所述待优化模型区域内所有的满足预设垂直向下拍摄条件的第一图像;
19、基于第二预设补拍范围,选择所述待优化模型区域内满足预设倾斜拍摄条件的第二图像;
20、根据所述第一图像和所述第二图像得到所述至少一个目标图像。
21、根据本技术的一个实施例,所述第二预设补拍范围由倾斜摄影的倾斜角度与gis数据确定。
22、根据本技术实施例的基于非全局重复建模的三维重构模型局部优化方法,通过确定目标优化模型区域,并对其进行数据补充采集,得到待优化模型区域,基于待优化模型区域,提取满足预设提取条件的至少一个目标图像,生成待优化模型区域文件,然后利用待优化模型区域文件进行二次三维模型构建,并基于预设的大地坐标系对构建结果进行模型拼接,得到目标三维模型。由此,解决了通过人工补拍数据以及将无人机和地面采集的数据直接合并后建模所产生的计算负担,从而降低数据补充采集和建模效率等问题,通过移动车载数据采集系统对模型区域自动补拍,并选择补拍前后变化较大的区域进行二次三维模型构建,以此提高了数据的补充采集和建模效率。
23、本技术第二方面实施例提供一种基于非全局重复建模的三维重构模型局部优化装置,包括:
24、采集模块,用于确定目标优化模型区域,并对所述目标优化模型区域进行数据补充采集,得到待优化模型区域;
25、提取模块,用于基于所述待优化模型区域,提取满足预设提取条件的至少一个目标图像,并根据所述至少一个目标图像生成待优化模型区域文件;以及
26、拼接模块,用于利用所述待优化模型区域文件进行二次三维模型构建,并基于预设的大地坐标系对构建结果进行模型拼接,得到目标三维模型。
27、根据本技术的一个实施例,所述采集模块,具体用于:
28、基于gis地图数据,获取路网位置和道路宽度信息;
29、根据所述路网位置和所述道路宽度信息对待优化道路区域进行区域选择,并根据预先构建的模型框选出满足预设破损区域条件的区域,得到所述目标优化模型区域。
30、根据本技术的一个实施例,所述采集模块,具体用于:
31、根据所述路网位置和所述道路宽度信息自动规划补拍路线;
32、根据当前相机参数生成最优候选区域,并按照预设生成策略在所述最优候选区域中生成多个候选视点,并通过预设的可视度矩阵优化筛选所述多个候选视点,且基于筛选结果生成车载摄像头视角网络;
33、基于所述补拍路线,根据所述车载摄像头视角网络实时调整摄像头视角,以对所述目标优化模型区域进行数据补充采集,得到所述待优化模型区域。
34、根据本技术的一个实施例,所述提取模块,具体用于:
35、基于第一预设补拍范围,选择所述待优化模型区域内所有的满足预设垂直向下拍摄条件的第一图像;
36、基于第二预设补拍范围,选择所述待优化模型区域内满足预设倾斜拍摄条件的第二图像;
37、根据所述第一图像和所述第二图像得到所述至少一个目标图像。
38、根据本技术的一个实施例,所述第二预设补拍范围由倾斜摄影的倾斜角度与gis数据确定。
39、根据本技术实施例的基于非全局重复建模的三维重构模型局部优化装置,通过确定目标优化模型区域,并对其进行数据补充采集,得到待优化模型区域,基于待优化模型区域,提取满足预设提取条件的至少一个目标图像,生成待优化模型区域文件,然后利用待优化模型区域文件进行二次三维模型构建,并基于预设的大地坐标系对构建结果进行模型拼接,得到目标三维模型。由此,解决了通过人工补拍数据以及将无人机和地面采集的数据直接合并后建模所产生的计算负担,从而降低数据补充采集和建模效率等问题,通过移动车载数据采集系统对模型区域自动补拍,并选择补拍前后变化较大的区域进行二次三维模型构建,以此提高了数据的补充采集和建模效率。
40、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的基于非全局重复建模的三维重构模型局部优化方法。
41、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的基于非全局重复建模的三维重构模型局部优化方法。
42、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!